

Содержание
[убрать]
1 Сложное движение
2 Определения
3 Доказательство
4 Обсуждение
5 Примеры
6 Примечания
Сложное движение
Основная статья: Сложное движение

Сложное движение.
Движение в механике всегда рассматривается по отношению к какой-либо системе отсчёта. Однако в некоторых случаях бывает целесообразно или даже необходимо изучать движение материальной точки(МТ) относительно двух различных систем отсчёта одновременно. Одну из этих систем отсчёта условно считают неподвижной, базовой, а другую полагают движущейся относительно первой. Тогда движение точки можно рассматривать, как состоящее из двух движений: первое — движение относительно движущейся системы отсчёта, второе — движение вместе с движущейся системой относительно неподвижной. Такое движение точки называют сложным или составным.
Определения
Условно неподвижную систему отсчёта принято называть абсолютной. Соответственно, абсолютными называют движение, перемещение, скорость и ускорение точки относительно этой СО. На рисунке система отсчёта K выбрана в качестве абсолютной.
Условно подвижную систему отсчёта принято называть относительной. Движение, перемещение, скорость и ускорение точки относительно этой системы также именуют относительными. Система K' на рисунке является относительной.
Движение, совершаемое подвижной системой K' и всеми жёстко связанными с нею точками пространства[3] относительно системы К, называют перено́сным. Если некоторая МТ движется относительно подвижной системы K', то в общем случае та точка системы K', в которой в данный момент находится МТ, также движется относительно неподвижной системы К. Мгновенную скорость этой точки системы K' называют переносной скоростью МТ.
Пусть
МТ в некоторый момент времени находилась
в точке А, а через промежуток
времени ![]() оказалась
в точке В (см. рис.). Тогда её перемещение
относительно системы К (абсолютное
перемещение) будет равно
оказалась
в точке В (см. рис.). Тогда её перемещение
относительно системы К (абсолютное
перемещение) будет равно ![]() .
Точка А подвижной системы K' за время
переместилась вместе с K' и оказалась в
точке С, совершив перемещение относительно
системы К (переносное перемещение),
изображённое на рисунке вектором
.
Точка А подвижной системы K' за время
переместилась вместе с K' и оказалась в
точке С, совершив перемещение относительно
системы К (переносное перемещение),
изображённое на рисунке вектором ![]() .
С точки зрения наблюдателя, связанного
с системой K', точка С является той точкой,
в которой МТ находилась первоначально,
поэтому вектор
.
С точки зрения наблюдателя, связанного
с системой K', точка С является той точкой,
в которой МТ находилась первоначально,
поэтому вектор ![]() представляет
собой перемещение МТ относительно
подвижной системы K', то есть относительное
перемещение. Из сказанного и векторной
диаграммы на рисунке следует
представляет
собой перемещение МТ относительно
подвижной системы K', то есть относительное
перемещение. Из сказанного и векторной
диаграммы на рисунке следует
![]()
Деля
данное равенство на промежуток времени ![]() ,
а затем устремляя его к нулю, в пределе
получаем
,
а затем устремляя его к нулю, в пределе
получаем
![]()
где ![]() —
абсолютная,
—
абсолютная, ![]() —
переносная, а
—
переносная, а ![]() —
относительная скорость движения МТ.
—
относительная скорость движения МТ.
Полученное равенство является математическим выражением теоремы о сложении скоростей, которая формулируется так:
При сложном движении абсолютная скорость материальной точки равна геометрической сумме переносной и относительной скоростей.
Теорему о сложении скоростей называют также правилом параллелограмма скоростей[4].
В
общем случае движение системы K' можно
представить как сумму двух движений:
поступательного движения со скоростью,
равной скорости начала координат системы
K', и вращательного движения вокруг
мгновенной оси, проходящей через это
начало. Можно показать, что переносная
скорость ![]() ,
скорость начала координат
,
скорость начала координат ![]() и
угловая скорость вращательного движения
системы
и
угловая скорость вращательного движения
системы ![]() связаны
соотношением[5]
связаны
соотношением[5]
![]()
С учётом этого равенства математическое выражение теоремы приобретает вид
![]()
Утверждение
теоремы, доказанное для двух систем
отсчёта нетрудно обобщить на случай
произвольного их количества. Действительно,
предположим, что считавшаяся нами до
сих пор неподвижной система К движется
относительно некоторой третьей системы.
Тогда для абсолютной скорости ![]() МТ
в этой системе в силу доказанной теоремы
будет выполняться
МТ
в этой системе в силу доказанной теоремы
будет выполняться
![]()
где ![]() —
переносная скорость точки системы К, в
которой в данный момент времени находится
МТ, движение которой мы изучаем. Очевидно,
что рассуждая аналогичным образом,
можно получить формулу сложения
скоростей, пригодную для любого количества
систем отсчёта.
—
переносная скорость точки системы К, в
которой в данный момент времени находится
МТ, движение которой мы изучаем. Очевидно,
что рассуждая аналогичным образом,
можно получить формулу сложения
скоростей, пригодную для любого количества
систем отсчёта.
Утверждение теоремы о сложении скоростей справедливо только до тех пор, пока скорости, о которых идёт речь в теореме, много меньше скорости света. В противном случае следует использовать релятивистскую формулу сложения скоростей.
Замечание.
Радиус-вектор ![]() МТ
в системе отсчёта К всегда можно
представить в виде суммы двух векторов:
МТ
в системе отсчёта К всегда можно
представить в виде суммы двух векторов:
![]()
где ![]() —
радиус-вектор начала подвижной системы
координат, а
—
радиус-вектор начала подвижной системы
координат, а ![]() —
радиус-вектор МТ в подвижной системе
K'. После дифференцирования из равенства
следует
—
радиус-вектор МТ в подвижной системе
K'. После дифференцирования из равенства
следует
![]()
Полученное
соотношение справедливо для любой МТ
и для любого момента времени. Следует,
однако, иметь в виду, что в общем случае
первый член суммы не равен переносной
скорости, а второй — не равен
относительной скорости. Действительно, ![]() —
это скорость начала
системы координат K'
—
это скорость начала
системы координат K' ![]() и
при наличии вращения системы K' не
совпадает со скоростью той точки системы,
в которой в данный момент находится МТ.
В свою очередь
и
при наличии вращения системы K' не
совпадает со скоростью той точки системы,
в которой в данный момент находится МТ.
В свою очередь ![]() представляет
собой скорость МТ относительно
начала координат,
то есть, определяется иначе, чем
относительная скорость
представляет
собой скорость МТ относительно
начала координат,
то есть, определяется иначе, чем
относительная скорость ![]() .
Равенства
.
Равенства ![]() и
и ![]() выполняются
только в тех случаях, когда система K'
движется поступательно, то есть когда
она не совершает поворотов (
выполняются
только в тех случаях, когда система K'
движется поступательно, то есть когда
она не совершает поворотов (![]() )
и все её точки движутся одинаково[6].
)
и все её точки движутся одинаково[6].
19.Определение относительного переносного кориолисова абсолютного ускорений Согласно теореме Кориолиса, абсолютное ускорение точки в сложном движении определяется как геометрическая сумма относительного, переносного и кориолисова ускорений (рис. 3)
aa = ar ⊕ ae ⊕ aC .

Рис. 3
Поскольку, в данном случае, относительное движение происходит по прямой линии, относительное ускорение ar направлено вдоль этой прямой и определяется выражением
![]()
Переносным ускорением точки M является ускорение точки M диска. Диск совершает вращательное движение, следовательно, переносное ускорение определяется выражением
ae = aeвр ⊕ aeцс ,
где aeвр= ε⋅ OM - вращательное ускорение точки M, направленное перпендикулярно отрезку OM ;
aeцс= ω2⋅ OM - центростремительное ускорение точки M, направленное к центру диска.
Ускорение Кориолиса или поворотное ускорение определяется по формуле
aC = 2 ωe ⊗ νr ,
где ωe - переносная угловая скорость,
νr - относительная скорость точки.
Направление ускорения Кориолиса определяется по правилу векторного произведения или по правилу Жуковского.
Величина ускорения Кориолиса определяется выражением
aC = 2 ωe νr sinα ,
где α – угол между векторами ωe и νr .
Рассмотрим, какой физический смысл заложен в ускорение Кориолиса. Для простоты будем считать, что диск вращается с постоянной угловой скоростью, а точка M движется относительно диска с постоянной относительной скоростью (рис.4).

Рис. 4
Пусть в момент времени t1 точка M занимала положение M1 и имела относительную скорость νr 1 . За промежуток времени Δt точка M переместится в положение M2 , при этом направление скорости νr изменится вследствие вращения диска. Вектор νr получит приращение Δνr . Отношение Δνr / Δt определяет среднее ускорение точки за промежуток времени Δt . Предел отношения Δνr / Δt при Δt→ 0 есть производная dνr /dt , как производная от вектора постоянного по величине.
Рассмотрим, как изменяется переносная скорость в зависимости от относительного движения. В моменты времени t1 и t2 переносная скорость определяется выражениями νe1= ω ⊗ OM1 и νe2= ω ⊗ OM2 . Тогда приращение вектора νe за счет относительного движения будет равно
Δνe = ω ⊗ OM2 - ω ⊗ OM1 = ω ⊗ (OM2 - OM1) = ω ⊗ νr⋅ Δt
Отношение Δνe / Δt в пределе при Δt→ 0 дает производную dνe / d t = ω ⊗ νr . Таким образом, ускорение Кориолиса с одной стороны характеризует изменение относительной скорости по направлению за счет переносного вращения и, с другой стороны, изменение величины переносной скорости за счет относительного движения.

Рис. 5
Абсолютное ускорение точки в сложном движении в общем случае определяется геометрической суммой пяти слагаемых
![]()
Для определения величины абсолютного ускорения удобнее пользоваться аналитическим методом сложения векторов:

20.Плоско параллельное движение твердого тела определение скоростей тела Уравнения плоскопараллельного движения. Разложение движения на поступательное и вращательное. Плоскопараллельным (или плоским) называется такое движение твердого тела, при котором все его точки перемещаются в плоскостях, параллельных некоторой неподвижной плоскости. Рассмотрим сечение тела какой-нибудь плоскостью OXY, параллельной неподвижной плоскости П (рис. 1.56).

Рис. 1.56 Рис. 1.57
При
плоскопараллельном движении все точки
тела, лежащие на прямой ![]() ,
перпендикулярной к сечению, т.е. к
плоскости П, движутся тождественно.
Поэтому для изучения движения всего
тела достаточно изучить, как дви-жется
сечение тела в плоскости OXY. В дальнейшем
будем плоскость OXY совмещать с плоскостью
рисунка, а вместо всего тела изображать
только его сечение.
Положение
сечения в плоскости OXY определяется
положением какого-нибудь проведенного
в этом сечении отрезка АВ (рис. 1.57).
Положение отрезка АВ можно определить,
зная координаты
,
перпендикулярной к сечению, т.е. к
плоскости П, движутся тождественно.
Поэтому для изучения движения всего
тела достаточно изучить, как дви-жется
сечение тела в плоскости OXY. В дальнейшем
будем плоскость OXY совмещать с плоскостью
рисунка, а вместо всего тела изображать
только его сечение.
Положение
сечения в плоскости OXY определяется
положением какого-нибудь проведенного
в этом сечении отрезка АВ (рис. 1.57).
Положение отрезка АВ можно определить,
зная координаты ![]() точки
А и угол
точки
А и угол ![]() ,
который от-резок АВ образует с осью
x.
Точку
А, выбранную для определения положения
сечения, называют полюсом. При движении
тела величины
,
который от-резок АВ образует с осью
x.
Точку
А, выбранную для определения положения
сечения, называют полюсом. При движении
тела величины ![]() и
и ![]() будут
меняться:
будут
меняться:
![]() (1.74)
(1.74)
Уравнения
(1.74), определяющие закон происходящего
движения, называются уравнениями
плоскопараллельного движения твердого
тела.
Плоскопараллельное
движение можно представить состоящим
из поступательного и вращательного
движений. Сечение тела (рис. 1.58) можно
переместить из одного положения в
другое, переместив сначала поступательно
и затем повернув на угол ![]() вокруг
оси, проходящей через полюс (точку А).
вокруг
оси, проходящей через полюс (точку А).

Рис. 1.58 Рис. 1.59
Следовательно,
плоскопараллельное движение тела
слагается из поступа-тельного движения,
в котором все точки тела движутся так
же, как полюс, и из вращательного движения
вокруг этого полюса.
За
полюс можно выбрать любую точку, движение
которой известно. При этом поступательное
движение зависит от выбора полюса, а
величина угла по-ворота и направление
поворота от выбора полюса не зависят
(рис. 1.58).
Скорости
точек тела при плоскопараллельном
движении.
Теорема
1. Абсолютная
скорость ![]() любой
точки плоской фигуры в каждый данный
момент равна геометрической сумме двух
скоростей: скорости
любой
точки плоской фигуры в каждый данный
момент равна геометрической сумме двух
скоростей: скорости ![]() про-извольно
выбранного полюса в поступательном
движении плоской фигуры и вращательной
скорости
про-извольно
выбранного полюса в поступательном
движении плоской фигуры и вращательной
скорости ![]() во
вращательном движении фигуры относительно
полюса.
Положение
любой точки В тела можно определить
равенством (рис. 1.59)
во
вращательном движении фигуры относительно
полюса.
Положение
любой точки В тела можно определить
равенством (рис. 1.59)
![]()
Взяв производную от обеих частей уравнения по времени получим,
![]() ,
,
где ![]() -
искомая скорость;
-
искомая скорость; ![]() -
скорость полюса;
-
скорость полюса; ![]() -
скорость точки В при вращательном
движении тела вокруг полюса А при
-
скорость точки В при вращательном
движении тела вокруг полюса А при ![]() Таким
образом
Таким
образом
![]() (1.75)
(1.75)
![]()
Теорема
2. Проекции
скоростей двух точек плоской фигуры на
ось, про-ходящую через эти точки, равны
и имеют одинаковый знак (рис. 1.60). Зная,
что ![]() ,
спроецируем данное выражение на прямую
АВ, тогда
,
спроецируем данное выражение на прямую
АВ, тогда
![]()
Теорема
3.
Плоская фигура в каждый момент времени
имеет одну точку, абсолютная скорость
которой равна нулю. Эта точка называется
мгновенным центром скоростей (МЦС),
обозначим ее буквой Р (рис.1.61). Докажем
сущест-вование МЦС ![]() и
и ![]() заданы.
Повернем полупрямую АI на 90 в сторону
вращения плоской фигуры. Отложим
отрезок Теорема
3.
Плоская фигура в каждый момент времени
имеет одну точку, абсолютная скорость
которой равна нулю. Эта точка называется
мгновенным центром скоростей (МЦС),
обозначим ее буквой Р (рис.1.61). Докажем
сущест-вование МЦС
заданы.
Повернем полупрямую АI на 90 в сторону
вращения плоской фигуры. Отложим
отрезок Теорема
3.
Плоская фигура в каждый момент времени
имеет одну точку, абсолютная скорость
которой равна нулю. Эта точка называется
мгновенным центром скоростей (МЦС),
обозначим ее буквой Р (рис.1.61). Докажем
сущест-вование МЦС ![]() тогда
точка Р и будет искомой.
тогда
точка Р и будет искомой.
![]() |
|![]()


Рис. 1.60 Рис. 1.61
При движении плоской фигуры положение МЦС непрерывно меняется. Графически МЦС находится как точка пересечения перпендикуляров, восста-новленных из двух точек к направлениям их скоростей (рис. 1.62)
![]()
Скорости точек плоской фигуры пропорциональны расстояниям от них до мгновенного центра скоростей.

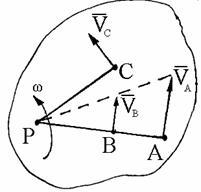
Рис. 1.62 Рис. 1.63
Если за полюс выбран МЦС, то скорость любой точки плоской фигуры есть вращательная скорость вокруг МЦС. Модуль скорости пропорционален расстоянию от точки до МЦС (рис. 1.63).

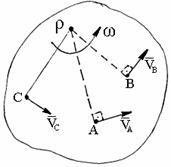
Рис. 1.64 Рис. 1.65
Зная
для данного момента времени положение
МЦС и скорость какой-либо точки В плоской
фигуры, можно определить угловую скорость
и скорость любой точки плоской фигуры
(рис. 1.64).
Если
известна по модулю и направлению скорость
одной точки А и на-правление скорости
другой точки В, то можно определить
скорости всех точек плоской фигуры
(рис. 1.65):
1.
Известно направление и модуль ![]() и
направление
и
направление ![]() 2.
Найдем положение МЦС: проведя перпендикуляры
к векторам скоростей
2.
Найдем положение МЦС: проведя перпендикуляры
к векторам скоростей ![]() и
и ![]() 3.
Определим
3.
Определим ![]() 4.
4. ![]() и
т.д.
Частные
случаи определения положения МЦС.
Известны направления скоростей двух
точек. Рассмотрим этот случай на примере
кривошипно-шатунного механизма (рис.
1.66). Направления скоростей точки А
кривошипа и ползуна В известны. МЦС
должен лежать в точке пересечения
перпендикуля-ров к направлениям скоростей
этих точек. Эта точка в бесконечности.
Точка А принадлежит кривошипу и ее
скорость
и
т.д.
Частные
случаи определения положения МЦС.
Известны направления скоростей двух
точек. Рассмотрим этот случай на примере
кривошипно-шатунного механизма (рис.
1.66). Направления скоростей точки А
кривошипа и ползуна В известны. МЦС
должен лежать в точке пересечения
перпендикуля-ров к направлениям скоростей
этих точек. Эта точка в бесконечности.
Точка А принадлежит кривошипу и ее
скорость ![]() ,
но точка А также принадлежит и шатуну
АВ. Выберем точку А за полюс, тогда
,
но точка А также принадлежит и шатуну
АВ. Выберем точку А за полюс, тогда ![]() ,
спроецируем на прямую АВ:
,
спроецируем на прямую АВ:
![]()
Спроецируем векторное равенство на перпендикуляр к АВ:

Шатун АВ совершает, так называемое, мгновенно-поступательное движение. Следовательно, если угловая скорость плоской фигуры равна нулю, то МЦС удален в бесконечность и тело совершает мгновенно- поступательное движение. Скорости всех точек плоской фигуры равны по величине и направ-лению. Если скорости двух точек плоской фигуры параллельны между собой и перпендикулярны линии, соединяющей эти точки, то МЦС можно найти из ус-ловия пропорциональности скоростей точек расстояниям от этих точек до МЦС (рис. 1.67).

Рис. 1.66 Рис. 1.67
При качении без скольжения одного тела по поверхности другого неподвижного тела МЦС совпадает с точкой соприкосновения тел, так как при отсутствии скольжения скорость точки соприкосновения равна нулю (рис. 1.68).

Рис. 1.68 Рис. 1.69
Определение ускорений точек тела. Абсолютное ускорение любой точки В плоской фигуры равно геометрической сумме ускорения полюса А и ус-корения точки В во вращательном движении фигуры вокруг полюса (рис. 1.69).
![]() (1.77)
(1.77)
Движение
плоской фигуры задано ![]()
![]()
Ускорение ![]() точки
В во вращательном движении вокруг полюса
найдем по формулам (1.71) и
(1.72)
точки
В во вращательном движении вокруг полюса
найдем по формулам (1.71) и
(1.72) ![]() или
или ![]() и
и ![]() Вектор
Вектор ![]() всегда
направлен от точки В к полюсу А,
вектор
всегда
направлен от точки В к полюсу А,
вектор ![]() направлен
перпендикулярно ВА в сторону вращения,
если оно ускоренное, и против вращения,
если оно замедленное.
Тогда
вместо равенства (1.77) получим:
направлен
перпендикулярно ВА в сторону вращения,
если оно ускоренное, и против вращения,
если оно замедленное.
Тогда
вместо равенства (1.77) получим:
![]() (1.78)
(1.78)
Пример
2.5. Центр
колеса, катящегося по прямой, имеет в
данный мо-мент скорость ![]() и
ускорение
и
ускорение ![]() .
Радиус колеса R = 0,2 м. Определить ускорение
точки В - конца перпендикулярного к ОР
диаметра АВ и ускорение точки Р,
совпадающей с мгновенным центром
скоростей (рис. 1.70).
Решение.
.
Радиус колеса R = 0,2 м. Определить ускорение
точки В - конца перпендикулярного к ОР
диаметра АВ и ускорение точки Р,
совпадающей с мгновенным центром
скоростей (рис. 1.70).
Решение.![]() и
и ![]() известны
поэтому принимаем точку О за полюс.
Определяем
известны
поэтому принимаем точку О за полюс.
Определяем ![]() .
Точка касания Р является мгновенным
центром скоростей, следовательно
.
Точка касания Р является мгновенным
центром скоростей, следовательно ![]() Так
как величина Р0 = R остается постоянной
при любом положении колеса, то найдя
производную от
Так
как величина Р0 = R остается постоянной
при любом положении колеса, то найдя
производную от ![]() ,
получим
,
получим ![]()
![]() =
= ![]()
Знаки ![]() и
и ![]() совпадают,
следовательно, вращение колеса ускоренное.
Следует помнить, что
совпадают,
следовательно, вращение колеса ускоренное.
Следует помнить, что ![]() определяется
таким образом только в том случае, когда
Р0 - величина постоянная.
определяется
таким образом только в том случае, когда
Р0 - величина постоянная.
Определяем ![]() и
и ![]() .
Так как за полюс взята точка О,
то
.
Так как за полюс взята точка О,
то
![]()
![]() Изобразим
все ускорения, приложенные в точке В
(рис. 1.71).
Изобразим
все ускорения, приложенные в точке В
(рис. 1.71).



Рис.1.70 Рис.1.71 Рис. 1.72
Проведя
оси Вх и Вy, находим что ![]() откуда
откуда ![]() Аналогично
находится и ускорение точки Р (рис.
1.72)
Аналогично
находится и ускорение точки Р (рис.
1.72) ![]() ,
, ![]() и
направлено от точки Р к О.
и
направлено от точки Р к О.
21.Мгновенный центр скоростей частные случаи его определения Теорема Эйлера-Шаля доказывает, что любое непоступательное перемещение фигуры в плоскости можно осуществить поворотом вокруг некоторого неподвижного центра.
В соответствии с этим легко доказывается, что при плоскопараллельном движении в каждый момент времени существует точка, неизменно связанная с плоской фигурой, скорость которой в этот момент равна нулю. Эту точку называют мгновенным центром скоростей (МЦС). В учебниках эту точку пишут с индексом V , например PV , CV .

Рисунок 2.16
При определении положения МЦС скорость любой точки может быть записана: VM=VCv ⊕ VMCv , где точка CV выбрана за полюс. Поскольку это МЦС и VCv=0 , то скорость любой точки определяется как скорость при вращении вокруг мгновенного центра скоростей:
VM=VCv ⊕ VMCv=VMCv, VM=VMCv=ω⋅CVM,
VN=VCv ⊕ VNCv=VNCv, VN =VNCv=ω⋅CVN,
VK=VCv ⊕ VKCv=VKCv, VK=VKCv=ω⋅CVK.
Из рисунка 2.16 видно, что МЦС лежит в точке пересечения перпендикуляров, проведённых к скоростям точек, при этом всегда справедливо соотношение:
VM/CVM=VN/CVN=VK/CVK=ω

Рисунок 2.17
На рисунке 2.17 показаны примеры определения положения МЦС детали кривошипно-шатунного механизма и приведены формулы для расчета скоростей точек.
1) CV совпадает с точкой B VB=0 . Шатун вращается вокруг точки B,
ωAB=VA/ACV=VA/AB;
2) VA/ACV=VB/BCV=ωAB;
3) МЦС лежит в «бесконечности»:
VA/∞=VB/∞=ωAB=0, VB=VA;
4) VA/ACV=VB/BCV=ωAB.
На рисунках 2.18-2.21 приведены примеры определения положения МЦС.

VA/ACV=VB/BCV=ω
Рисунок 2.18

.
VB||VA
В этом случае МЦС находится в «бесконечности», т.е.
ω=VA/∞=VB/∞=ωAB=0, VB=VA
Рисунок 2.19

VA/2R=V0/R=VM/R√2=ω, VA/2R=V0/R=VB/R+r=ω, VA/R+r=V0/r=VN/R-r=ω
Рисунок 2.20
Формулы справедливы при отсутствии проскальзывания в точке CV .

VM=VA, VA=VM
VM/MCV=V0/OCV=VN/NCV=VK/KCV=ω2 VM/MCV=V0/OCV=VN/NCV=ω2
22.Определения ускорений точек тела при плоском движении
|
|
Воспользуемся уравнением (42) для определения скорости и вычислим от него производную

![]() ,
,
![]() .
(46)
.
(46)
Ускорение любой точки в сечении тела, совершающем плоское движение, определяется как геометрическая сумма ускорений полюса и ускорения точки в ее вращении вместе с телом по отношению к полюсу.
Так как точка B по отношению к полюсу совершает движение по дуге окружности, то
![]() .
(47)
.
(47)
Очевидно ![]() ,
, ![]() ^
^![]() ;
; ![]() ,
, ![]() ||
||![]() .
.
Если точка A движется непрямолинейно, то ее ускорение также будет складываться из касательного и нормального.
23.Закон о динамике основное уравнение динамики Общее уравнение механики представляет собой математическую формулировку принципа Д’Аламбера — Лагранжа, дающего общий метод решения задач динамики и статики и являющегося одним из основных принципов теоретической механики.([1] Стр.142) Этот принцип объединяет принцип возможных перемещений и принцип Д'Аламбера