методы оптимизации шпоры
.doc|
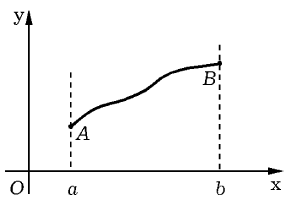
1. Общая постановка задачи математического программирования. Задача
формулируется таким образом: среди
элементов Порядок поиска решений: 1. Поиск всех точек стационарности 2. Выбор тех, что принадлежат области допустимых решений 3. Проверка граничных точек. Сложность решения зависит от размерности. Например, может потребоваться проверить условие на границе, заданной линией, т.е. в бесконечном количестве точек. Задача
на условный
экстремум
включает ограничения: Этап поиска условий экстремума – обычно аналитический, а вычисления оптимальных решений – инженерный.
Найти наибольшее и наименьшее значения y при ограничениях:
Ограничения бывают типа равенств и неравенств.
|
2.1 Метод неопределенных множителей Лагранжа при поиске максимальных значений функций. Требуется
найти экстремум функции Составим
систему из n+m
уравнений, приравняв нулю частные
производные функции Лагранжа по
|
|
2.2
Пример.
Найти экстремум функции Составляем
функцию Лагранжа
Правда,
можно было решить проще: выразить из
ограничений одну переменную через
другую, подставить в функцию и найти
экстремум функции одной переменной:
например
|
3. Линейный функционал. Функционалом
называют отображение, аргументов
которого является функция вещественной
переменной, а результатом – вещественное
число. Функционал обозначим Другое определение: функционалами называются величины, значение которых определяются выбором одной или нескольких функций. Пример: длина дуги пространственной кривой, соединяющей заданные точки. Исторические предпосылки введения функционалов: 1. Геодезические линии. Найти линию минимальной длины между двумя точками при некотором условии. 2. Изометрическая задача. Найти замкнутую линию заданной длины, ограничивающей максимальную площадь. Условие на постоянство длины кривой называется изопараметрическим. 3. Задача о брахистохроне. На плоскости, требуется попасть из одной точки в другую без начальной скорости и только за счет силы тяжести за минимальное время. Функционал
|
|
4. Понятие вариации функционала. Вариация
функционала позволяет определить
экстремум функционала. Вариация
функционала обозначается как
|
5. Вычисление вариации функционала. Для вычисления вариации функционала запишем:
где
При
переходе
|
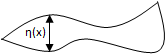
 На картинке
изображены линии уровня
На картинке
изображены линии уровня 
|
6.1 Постановка задачи Эйлера. Нужно найти функцию, которая соответствует критерию оптимальности.
Рассматривается
функционал вида
|
6.2
где Проинтегрировав по частям второе слагаемое, получим:
Тогда получим условие экстремума:
Основная лемма вариационного исчисления позволяет записать условие экстремума в виде дифференциального уравнение для искомой кривой:
|
|
8. Пример использования уравнения Эйлера для поиска оптимального управления. Пусть
имеется динамический объект, описываемый
дифференциальным уравнением
|
10. Уравнение Эйлера-Пуассона. Рассматривается
функционал вида
11. Пример использования уравнения Эйлера-Пуассона в теории оптимального управления. Пусть
имеется динамическая система,
описываемая уравнением
|
|
12.1 Вариационные задачи с подвижными границами. Пример в теории управления. Рассмотрим задачу об экстремуме функционала
Функция
|
12.2Интеграл в правой части равен 0 из выражения 2. Значит
Так как вариации в точках a и b могут меняться произвольно, можно записать:
Получили уравнение Эйлера с естественными краевыми условиями.
|
|
13. Вариационные задачи на условный экстремум. Имеется функционал вида
Каждая
из функций проходит через две заданные
для нее точки, на функции наложены
ограничения вида Воспользоваться
системой уравнений Эйлера не
получится – она справедлива для
независимых переменных
Находится
экстремум этого функционала, оставляются
функции
|
15. Пример использования множителей Лагранжа для поиска управлений. Пусть
имеется динамический объект, описываемый
дифференциальным уравнением
Исключая
|
|
16. Понятие переменных состояния. Наиболее полным описанием системы является форма Коши.
Величины
Если линейная система стационарна, матрицы A и B не зависят от времени.
17. Постановка задачи оптимального управления. Объект
задается в форме Коши: система уравнений
Такие задачи решаются с помощью принципа максимума Понтрягина, а также методом динамического программирования.
|
18. Линеаризация дифференциальных уравнений и ее использование при получении принципа максимума. Пусть
дифференциальное уравнение задано в
виде Проведем
линеаризацию в окрестности
Так
как
|
|
19. 1Принцип максимума. Это не вывод, просто поиск пути Задача задана – см. 17 Введем
дополнительную переменную
тогда
из
Изменив
немного входное воздействие
|
19.2 Линеаризация
j'ой
компоненты вектора
Подстановка
равенства в предыдущее, за скобки
можно вынести
откуда
называемые сопряженными уравнениями. Введем
некую функцию
|
|
20. Теорема о числе переключений. (теорема об n интервалах) Если
объект управления описывается линейным
дифференциальным уравнением n
порядка, корни его характеристического
уравнения вещественные неположительные
(могут быть кратными), то для оптимального
управления необходимо и достаточно,
чтобы на n
интервалах управляющее воздействие
было равно максимальному
|
21.1 Определение моментов переключения. а)
Разветвленная схема,
Это система уравнений в форме Коши. По принципу максимума Понтрягина:
откуда
По
теореме об n
интервалах: Таким
образом, функция
Решением каждого из уравнений будет:
содержит константу интегрирования Подставляя
результаты в
|
|
21.2
Эта функция
имеет Если
в рассматриваемой структуре содержится
k
звеньев с одинаковым динамическим
свойством (т.е. имеет одинаковые
постоянные времени T),
то количество интервалов будет равно
б)
Параллельная схема,
Пусть
начальное состояние
|
21.3 Как в вопросе а) получается решение:
Постоянные
интегрирования выбираются из условия
трансверсальности: вектор
В
момент окончания управления
Отсюда находим:
Подставляя
результаты в
Данная
функция знака не меняет, т.к. значения
экспонент возрастают при росте t,
а коэффициенты при них положительны.
Значит, попасть на гиперплоскость
можно с помощью одного интервала
управления при
|
|
22.1 Принцип оптимальности. Пусть движение системы описывается конечно-разностным уравнением:
где
Обозначим
Функционал, минимизацию которого нужно обеспечить при оптимальном управлении, выражается суммой:
Оптимальный процесс будет определен, если будут найдены |
22.2 значения управляющих воздействий во все дискретные моменты времени (постоянно на интервале), минимизирующие сумму функционала. При этом необходимо прохождение траектории через начальную точку. Критерий
оптимальности является сложной
функцией большого числа переменных
При этом будем руководствоваться принципом:
Значит, для любой траектории каждый ее участок, связывающий любую точку этой траектории с конечной, является оптимальным (хотя это не относится к любому участку траектории вообще). Участи процесса будем рассматривать в последовательности, обратной из номеру. Рассмотрим
отрезок, соответствующий времени |
|
22.3
значит Обозначим
Другими
словами, имеем таблицу значений Перейдем к предыдущему интервалу. Аналогично:
На основании формулы конечно-разностных уравнений:
Минимизируем
И так далее. На каждом шаге минимизации определяется оптимальное значение, зависящее от координаты. Процесс расчета продолжается, пока не придет к начальному интервалу. На нем используется начальное условие и определяется начальное значение управляющего значения, а за ним и весь ряд управляющих значений. С увеличением порядка системы быстро возрастает объем вычислений.
|
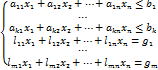
25. Постановка задачи линейного программирования. Задача допускает строгое алгоритмическое решение и определяется таким образом: в многомерном пространстве определяется область допустимых решений с помощью линейных ограничений типа равенств и неравенств:
где
Допустимое
решение – это вектор
|
|
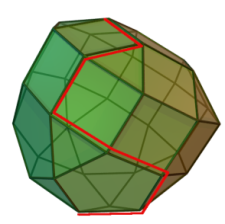
26. 1 Определение моментов переключения. Для определения экстремальных точек сперва определим выпуклое множество. Множество M будет выпуклым, если две любые точки A,B, принадлежащих множеству M, определяют отрезок прямой, целиком принадлежащий множеству M.
Если
наше выпуклое множество является
кругом, то экстремальными точкам
являются все точки на его окружности.
В случае, если наше выпуклое множество
– многоугольник, то экстремальными
точками являются все углы. Таким
образом, чтобы точка была экстремальной,
требуется, чтобы она лежала на отрезке,
стягивающемся в точку, математически:
|
26.2
Например, имеется
система уравнений
|
|
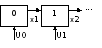
27.1 Симплексный метод.
Можно
определить оптимальное решение
перебором всех экстремальных точек,
подставляя в них решение, но это может
быть громоздко для большого количества
точек. Поэтому есть более удобный
способ – симплексный метод. Его суть
заключается в нахождении хотя бы одной
экстремальной точки, а затем передвижения
от нее к другим точкам, пока такое
движение будет возможно. Исчезновение
этой возможности означает, что точка
– оптимальна (минимальна/максимальна).
Для начала путем теоремы об экстремальных
точках (см. 26) находим одну из точек.
Например, требуется найти наименьшее
значение линейной формы
|
27.2
Выберем
первую точку, значение линейной формы
в ней будет
Переменные, имеющие значения в исходной экстремальной точки, называются базисными, а нулевые переменные – свободными. Решая систему относительно базисных переменных, получим:
|