

Фоторезисторы

Рис.10.10. Чувствительность фоторезистора.
У некоторых материалов (например, CdS, CdSe, PbS, PbSe) электрическое сопротивление изменяется под действием света из-за образования электронно-дырочных пар. Возникающие при этом свободные носители заряда вызывают резкое снижение сопротивления. На рис. 10.10 показана зависимость сопротивления такого датчика при различной освещенности (измеренной в люксах). В зависимости от силы света оно изменяется от 100 до 1 кОм. Спектральная чувствительность (рис. 10.11) определяется выбором материала. Так CdS обладает максимальной чувствительностью в зеленой области спектра и поэтому особенно пригоден для применения в измерителях освещенности. В противоположность этому максимум спектральной чувствительности CdSe находится в красной области, а у фоторезисторов из PbS/PbSe — даже в ИК-области.
Конструкция промышленного фоторезистора показана на рис. 10.11. Он состоит из тонкой пленки светочувствительного материала (CdSe/CdS) в форме меандра. Этот фотопроводящий слой, расположенный на керамической основе с соединительными проводами, для защиты от влаги и грязи покрыт слоем прозрачного полимера. На рис. 10.11 показаны также наиболее распространенные конструктивные формы, обеспечивающие разнообразие возможностей применения фоторезисторов. Некоторые области применения датчиков на основе фоторезисторов проиллюстрированы на рис. 10.12.


Рис. 10.12. Примеры применения фоторезисторов.
Тепловые приемники излучения
Тепловыми приемниками излучения называют детекторы, в которых под действием облучения светом происходит нагрев, вызывающий возникновение в них вторичных процессов (изменение сопротивления, возникновение термических напряжений). Тепловые приемники излучения применяются чаще всего для ИК-области, так как для видимого и ультрафиолетового (УФ) диапазонов спектра имеются более чувствительные датчики. Существенным достоинством тепловых приемников излучения является независимость их чувствительности от спектрального состава излучения, т.е. их чувствительность остается почти постоянной от УФ- до ИК-диапазона. В табл. 10.1 приведены некоторые типы таких детекторов.
Таблица 10.1
|
№ |
Тип датчика |
Физический эффект |
Выходной параметр |
|
|
Болометр |
Изменение сопротивления металла или полупроводника |
Сопротивление |
|
|
Термобатарея |
Миниатюризованное исполнение термопары. Рабочий спай подвергается действию излучения, в то время как опорный спай экранирован. |
Напряжение |
|
|
Пироэлектрический детектор |
Изменение поляризации некоторых материалов. Реагирует только на изменение излучения |
Переменное напряжение |
Оптические датчики положения

Рис. 10.13. Схема устройства для регистрации вибрации механизма.
С помощью датчиков положения можно бесконтактным способом дистанционно регистрировать процессы перемещения и управлять ими. Пример применения такого датчика показан на рис. 10.13.
Например, нужно зарегистрировать вибрацию какого-либо механизма в процессе работы при различных нагрузках. Для этого на нем в характерном месте устанавливают светодиод (излучатель). Излучение этого светодиода с помощью отображающей оптики (например, линзы) фокусируется на датчике положения.
В принципе такой датчик состоит из удлиненного pin-диода с двумя выходными электродами с одной стороны и одним электродом с противоположной стороны (рис. 10.14).
При неработающем механизме отображающая оптика юстируется таким образом, чтобы на обе части pin-диода попадало излучение одинаковой интенсивности, т.е. IА = IВ. Как только светодиод начинает перемешаться из-за вибраций механизма, интенсивность перераспределяется и нарушается равенство токов IА и IВ. В итоге разность ∆I = |IА – IВ| оказывается мерой уровня вибрации механизма, которую можно оценивать при разных режимах работы.
Важнейшие характеристики датчиков положения графически представлены на рис. 10.16. Линейность измерения положения (рис. 10.16,б) означает отклонение выходного сигнала от номинального значения (в процентах) при линейном смешении по всей длине датчика (в данном случае 30 мм). Это важнейшая характеристика, и для датчика она соблюдается в пределах погрешности ±1%.

Рис. 10.14. Структура датчика положения: подложка из высокочистого кремния является i-областью с собственной проводимостью.

Рис. 10.15. Конструктивное исполнение датчика положения.
а)  б)
б)  в)
в)  г)
г) 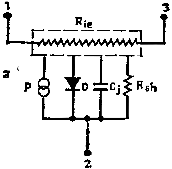
Рис. 10.16. Спектральная чувствительность (а), линейность измерения положения (б), температурная зависимость спектральной чувствительности (в) и эквивалентная схема (г) датчика положения.
Р — генератор фототока; D — идеальный диод; Сj — емкость рn-перехода; Rsh — сопротивление шунта; Rie — поверхностное сопротивление,

Рис. 10.17. Вычислительная схема измерительного блока к датчику положения.
R1 — зависит от выходного сигнала, U5 — аналоговый делитель.
При обработке сигналов датчика (I1/I2), как показано на рис. 10.17, формируется отношение разности отдельных сигналов I1 и I2 к их сумме. Достоинство этого метода заключается в том, что при этом исключается влияние на точность измерения таких факторов, как изменение мощности излучения светодиода или изменение чувствительности детектора. Во избежание искажения результатов измерений из-за дрейфа нуля или других подобных причин в качестве операционных усилителей 1...4 необходимо использовать интегральные схемы, отвечающие высоким требованиям к качеству обработки сигнала.
Типичными примерами применения оптических датчиков положения являются измерения протяженных объектов (например, туннелей, зданий, конструкций) с помощью луча лазера, направляемого на датчик. Отклонение луча от центра датчика вследствие перемещений или вибраций может быть измерено с большой точностью.
Двухкоординатное измерение положения добавляет еще одну степень свободы при определении по положения или размещении (позиционировании) объекта.

Рис. 10.18. Конструктивное исполнение двухкоординатного датчика положения.
Датчик этого типа состоит из активной поверхности в форме квадрата, на каждой стороне которого имеется по электроду (рис. 10.18.). Противоположные электроды предназначены соответственно для о пределения смещений по осям X и Y, как показано на рис. 10.19. Сигналы Y1 и Y2 с помощью предусилителей согласуются с вычислительной схемой, формирующей отношение разности сигналов к их сумме. Процесс вычисления аналогичен осуществляемому в линейных датчиках положения. Благодаря дополнительной степени свободы (по оси X) осуществляется двухкоординатное измерение положения.
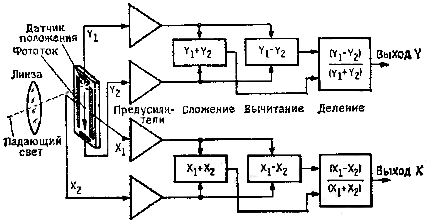
Рис. 10.19. Схема измерительного блока (вычислительная схема) двухкоординатного датчика положения.

Рис 10.20. Типичная линейность измерения положения.
Линейность ХУ-позиционирования показана на рис. 10.20. Она представляет собой меру точности определения положения. Область применения датчиков этого типа в принципе та же, что и у линейных.