

ЭЛЕКТРОТЕХНИКА / Электротехника и электроника Конюшенко 2007
.pdf211
Принцип действия асинхронного двигателя основан на взаимодействии токов в короткозамкнутых витках, расположенных во вращающейся части двигателя – роторе – с вращающимся магнитным потоком, создаваемым обмоткой, размещенной в пазах неподвижной части двигателя – статоре. Магнитный поток при своем вращении пересекает обмотку ротора и индуцирует в ней ЭДС. Индуцируемая ЭДС создает ток, направление которого совпадает
снаправлением ЭДС, определяемой по правилу правой руки.
Врезультате взаимодействия проводников обмотки ротора, по которых проходят токи, с вращающимся магнитным полем возникают электромагнитные силы, направления действия которых согласно правилу левой руки совпадает с направлением вращения магнитного потока. Действие электромагнитных сил создает электромагнитный момент.
На рис. 3.2 показана принципиальная схема действия асинхронного двигателя. Магнитный поток Ц , вращающийся с частотой n0 , об/мин (с угло-
вой скоростью 0 , рад/с), пересекает стержни обмотки ротора, индуцируя в
них ЭДС. Крестиками и точками показано направление тока в стержнях обмотки. Возникающий в роторной обмотке ток, взаимодействуя с магнитным полем, создает электромагнитные силы F . В результате образуется вращающий момент и ротор начинает вращаться. В установившемся режиме выполняется неравенство n n0 ( 0 ). Так как ротор вращается асинхронно (не-
синхронно) с магнитным полем, то электродвигатель называется асинхронным.
В простейшем случае в пазах статора размещаются три катушки (обмотки) с пространственным смещением друг относительно друга на 120º. Каждая из катушек создает пульсирующий синусоидальный магнитный поток. Магнитные потоки смещены по фазе друг относительно друга на 120º:
фА Фm sin щt ,
, фB Фm sin(щt 120 )
.фC Фm sin(щt 120 )
Для определения результирующего магнитного потока магнитные потоки ЦA , ЦB , ЦC изображают на плоскости системы прямоугольных декарто-
вых координат, на которой размещены катушки статорной обмотки (рис. 3.3, а). Магнитный поток A пульсирует перпендикулярно плоскости катушки A-
X, B - перпендикулярно плоскости катушки B-Y, C - перпендикулярно
плоскости катушки C-Z. Взяв проекцию всех магнитных потоков на ось x , получают

212
( Ф)x ФA ФB cos 60 ФC cos 60
Фm sin щt Фm sin(щt 120 ) cos 60 Фm sin(щt 120 ) cos 60
32 Фm sin щt .
Проекция магнитных потоков на ось y дает
( Ф)y ФB cos30 ФC cos30 32 Фm cosщt
Составляющие ( Ф)x и ( Ф)y магнитного потока, каждая из которых
пульсирует вдоль своей оси, расположены под углом 90º друг относительно друга. Результирующий магнитный поток
Ф ( Ф)x2 ( Ф)y2 3 Фm |
(3.1) |
|
|
2 |
|
Выражение (3.1) показывает, что результирующий магнитный поток по |
||
величине не изменяется. Составляющая ( Ф)x |
магнитного потока изменяет- |
|
ся по закону синуса, а составляющая ( Ф)y - |
по закону косинуса. Следова- |
|
тельно, в зависимости от времени результирующий магнитный поток изменяет свое положение в пространстве.
Находят отношение составляющих ( Ф)x и ( Ф)y :
( Ф)x |
|
( 3/ 2 )Фm sin щt |
tgщg. |
|
( Ф)y |
( 3/ 2 )Фm cos щt |
|||
|
|
На рис 3.3, б изображена диаграмма, на которой даны составляющие магнитного потока и результирующий поток Ф. Из диаграммы видно, что tg tg t , а следовательно, угол t и зависит от времени t и угловой час-
тоты . За время одного периода T магнитный поток повернется на угол

213
бФ 2рf1Ф 2рФ1 Ф 2р.
Как видно из данного выражения магнитный поток за один период поворачивается на угол 2 , т.е совершает один оборот. Тогда за одну секунду магнитный поток совершит f оборотов. Частота вращения магнитного по-
тока n0 пропорциональна частоте сети f . Поэтому при |
f1 =50 |
Гц магнитный |
поток совершит 50 об/с или 3000 об/мин. При частоте |
f1 =400 |
Гц магнитный |
поток совершит 24 000 об/мин.
Частота n0 (угловая скорость 0 ,) вращения магнитного поля зависит не только частоты f1 питающего напряжения, но и от числа полюсов самого магнитного поля:
n0 60 f1 /p об/мин,
где p число пар полюсов вращающегося магнитного поля. Угловая
скорость вращения магнитного поля
0 2рn0 / 60 2р60 f1 /( 60 p) 2рf1 /p рад/с.
Многополюсные асинхронные двигатели получают за счет конструкции обмотки статора.
Вращающееся магнитное поле может быть возбуждено и двухфазной системой напряжений при условии, что обмотки статора в пространстве смещены на 90º и напряжения, питающие статорную обмотку, имеют фазовый сдвиг 90º.
3.1.2 Основные уравнения асинхронного двигателя при неподвижном и вращающемся роторе
При анализе режимов работы асинхронного двигателя удобно пользоваться безразмерной величиной, называемой скольжением (S), под которой понимают разность скоростей (частот) вращения магнитного поля статора ( n0 ) и ротора ( n2 ), отнесенная к скорости (частоте) вращения магнитного по-
ля статора, т.е.:
214
S n0 n2 . n0
Или через угловую скорость:
S0 2 .
0
Частота вращения ротора всегда меньше частоты вращения магнитного поля, так кА в случае их равенства магнитное поле не будет пересекать роторную обмотку, и ЭДС ротора, а следовательно, и ток в его обмотке стал бы равен нулю, что привело бы к исчезновению электромагнитных сил, которые создают вращающий момент
Значения скольжения асинхронного двигателя изменяются от S=1 (при пуске, когда n=0), до S= Sном , что соответствует номинальной нагрузке двига-
теля. Номинальное скольжение современных асинхронных двигателей находится в пределах Sном =2…5%. Скольжение холостого хода Sх не превышает
1%.
Как указывалось выше, ЭДС в обмотках статора и ротора создаются в результате относительного вращения магнитного поля и обмоток, при котором линии магнитного поля пересекают участки (стержни) обмоток, находящиеся в пазах статора и ротора. Для определения ЭДС и её направления принято рассматривать движение проводника относительно неподвижного магнитного поля (правило правой руки). Тогда ЭДС в любом из проводников статора или ротора eпр Blv , где B – магнитная индукция в воздушном зазоре
(в месте нахождения проводника); l – длина проводника, пересекаемого магнитным полем (длина магнитопровода машины); v – линейная скорость движения проводника в магнитном поле, которое распределяется синусоидально вдоль воздушного зазора.
Среднее значение ЭДС в одном витке обмотки
Eср вит 2Bсрlv ,
где:
215
Bср Фп/Sп Фп/(lф) ;
Фп 32 Фm ,
ф рD/( 2 p) ,
D – внутренний диаметр статора.
Значение ЭДС в одной фазе обмотки статора
E1 сс Eср витw1 2Bсрlv0 w1 ,
где
w1 - число витков одной фазы обмотки статора,
v0 0 D/ 2 ,
0 2рn0 / 60 - угловая скорость вращения магнитного потока. Максимальное значение ЭДС статорной обмотки
E1 m р2 E1 сс .
Произведя следующие замены, получают
E1 m 2рw1 f1Фп .
Для учета влияния размещения обмотки в пазах статора на ЭДС витков, приводящего к неравенству геометрической и алгебраической сумм ЭДС
витков обмотки E вит Eвит , вводят обмоточный коэффициент
kоб E вит / Eвит . Тогда:
E1 m 2рw1 f1Фпkоб 1 |
(3.1') |

216
Для действующего значения ЭДС выражение (3.1') принимает вид:
E1 E1 m / |
2 4.44w1 f1Фпkоб 1 . |
Аналогично, для неподвижного ротора ЭДС одной фазы обмотки
E2 4.44w2 f1Фпkоб 2 ,
где
w2 - число витков фазы обмотки ротора; kоб 2 - обмоточный коэффициент.
С учетом вышеизложенного, уравнения асинхронного двигателя при неподвижном роторе (S=1) будут иметь следующий вид:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
E1 I1 Z1; |
|
|
||||||
U1 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
O |
E2 I 2 Z2 ; |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m2 |
|
W2 |
коб2 |
|
|
|
|
|
|
|
|
|||
I1 |
I1 |
|
|
|
|
|
I 2 . |
||
|
m1 |
W1 |
коб1 |
||||||
|
|
|
|
|
|
|
|||
(3.2)
(3.3)
(3.4)
Уравнение (3.4) называют уравнением магнитодвижущих сил (или
уравнением магнитного состояния), а ток I1 - намагничивающим током. Для трехфазного двигателя число фаз статора m1 всегда равно трем, а
для ротора число фаз m2 определяют следующим образом: а)для короткозамкнутого ротора m2 z2 ;
б)для фазного ротора: m2 m1 3; где z2 число зубцов ротора.
Обмоточный коэффициент ротора: а) короткозамкнутого: коб2=1; б) фазного: коб2<1.
Число витков ротора:

217
а) короткозамкнутого: w2= 12 ;
б) фазного: w2 >>1.
При вращающемся роторе изменится вид только уравнения (3.3):
|
|
|
|
|
|
|
|
U1 |
E1 |
I1 |
Z1; |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
(R2 |
jx2S); |
|
O |
E2 |
I 2 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I1 I1 I '2 , |
|
|
|||||
|
|
|
|
|
|
|
|
где:
(3.5)
(3.6)
(3.7)
|
'2 |
= |
m |
|
|
W к |
|
I |
|
2 |
2 |
об2 I 2 . |
|||
|
|
|
m |
|
W к |
об1 |
|
|
|
|
|
1 |
|
1 |
|
3.1.3 Схемы замещения асинхронного двигателя
Анализ уравнений (3.2-3.4) показывает, что синхронный двигатель с неподвижным ротором подобен трансформатору, у которого вторичная обмотка замкнута накоротко.
Следовательно, для получения схемы замещения асинхронного двигателя можно воспользоваться тем же приемом, что и для трансформатора, т.е. привести параметры ротора к числу витков и числу фаз статора.
При этом для того, чтобы правые части уравнений (3.5-3.7) имели такой же вид, как и неподвижного ротора, запишем уравнений (3.6) в следующем виде:
O E2 I 2 ( RS2 jx2 ) ,
или, добавив и отняв в правой части I 2 r2,:

218
|
|
1 S |
|
|
|
|
.(3.8) |
I 2 |
|
R2 |
E2 |
I 2 |
Z 2 |
||
|
|
S |
|
|
|
|
|
Уравнение (3.8) показывает, что асинхронный двигатель с вращающимся ротором подобен трансформатору, у которого к вторичной обмотке подключена нагрузка:
RH r2 1 S S .
Величина сопротивления RH зависит от скольжения, а скольжение – от нагрузки на валу двигателя. Следовательно, сопротивление RH является эквивалентом нагрузки двигателя.
Величины приведенного ротора обозначают теми же символами, что и неприведенного, но со штрихом. Определим соотношения между величинами в приведенном и реальном роторах.
Для напряжений и ЭДС ротора:
E'2 E1 E2 |
w1 kоб1 |
KU E2 , |
|
|
|||
|
w k |
об2 |
|
|
2 |
|
|
где KU w1 kоб1 . w2 kоб2
Коэффициент KU называют коэффициентом приведения по напряже-
нию.
Для токов и магнитодвижущих сил ротора:
|
|
|
|
0,45 m |
W1 |
kоб1 |
|
I ' |
2 |
0,45 m |
2 |
|
W2 kоб2 |
I |
, |
||||
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
1 |
|
P |
|
|
|
|
|
|
|
|
P |
2 |
|
||
|
|
|
|
|
|
m2 |
W2 |
kоб2 |
|
|
|
|
|
||||||
|
|
|
|
илиI '2 |
|
I2 |
KI I2 , |
|
|
||||||||||
|
|
|
|
|
|
|
m |
W k |
об1 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
1 |
|
|
1 |
|
|
|
|
|
|
|
||
где: KI |
m2 |
W2 |
kоб2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
W |
k |
об1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
219
Коэффициент KI называют коэффициентом приведения по току.
С учетом равенства потерь в реальном и приведенном роторах имеем:
m1 (I '2 )2 R'2 m2 I22 R2 .
Следовательно:
R'2 R2 m1 W1 kоб1 2 ; m2 W2 kоб2
или R'2 KГ R2 ,
где: KГ m1 W1 kоб1 2 , m2 W2 kоб2
Коэффициент KГ называют коэффициентом приведения по сопротив-
лению.
С учетом полученных коэффициентов приведения ( KU , KI , KГ ) уравне-
ния электрического и магнитного состояния асинхронного двигателя с вращающимся ротором будут иметь следующий вид:
|
|
|
|
Z1; |
|
|
(3.8) |
|
U1 |
E1 |
I1 |
|
|
|
|||
|
|
1 S |
|
|
|
|
|
|
|
|
|
|
|
|
Z'2 ; |
(3.9) |
|
I '2 |
S |
R'2 E'2 |
I '2 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.10) |
I '1 |
I1 |
I '2 . |
|
|
|
|||
|
|
|
|
|
|
|
|
|
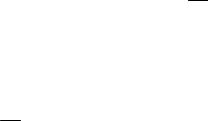
Уравнениям (3.8-3.10) соответствует схема замещения, показанная на рис.3.4.
220
Рис.3.4
Сопротивление Z называют сопротивлением намагничивания. Как и в
трансформаторе оно зависит от напряжения U1. С повышением этого напряжения сопротивление Z уменьшается.
Изображение на рис.3.4 схема называется Т-образной схемой замещения. Эта схема полностью отражает физические процессы, происходящие в асинхронном двигателе, но имеет узловую точку (а) между сопротивлениями Z1 и Z'2 , что усложняет расчет токов при различных значениях скольжения.
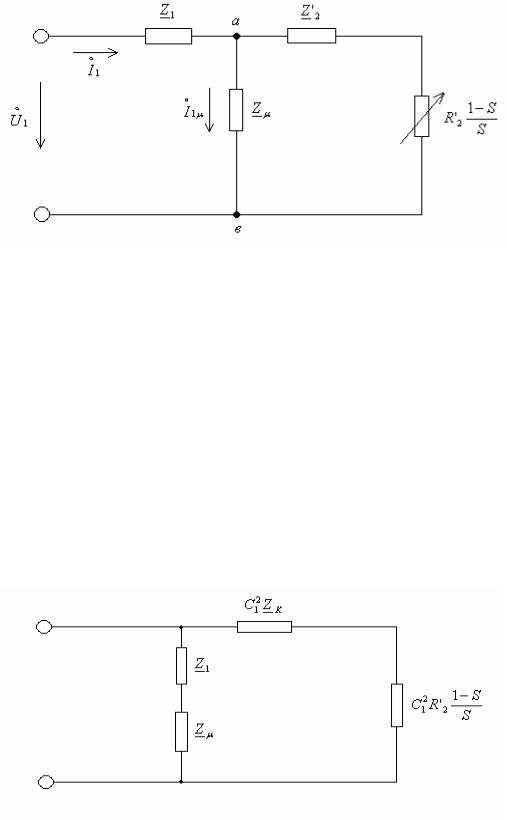
Поэтому большое практическое применение для анализа режимов работы асинхронного двигателя находит другая схема замещения, в которой намагничивающая ветвь подключена непосредственно на вход схемы, куда подводится напряжение U1 . Эта схема показана на рис.3.5, её обычно называют Г-
образной схемой замещения асинхронного двигателя:
Рис.3.5
На рис.3.5 приняты следующие обозначения: