

Лаб 3. Ebilock-950
.docxСтруктура системы МПЦ Ebilock 950.
С точки зрения функционального назначения в данной МПЦ можно выделить четыре основных подсистемы:
-
диалоговую;
-
диагностики;
-
логических зависимостей;
-
управления и контроля состояния объектов.
В состав диалоговой подсистемы входит автоматизированное рабочее место дежурного по станции (АРМ ДСП), основными функциями которого является:
-
отображения путевого развития станции с индикацией текущего состояния объектов контроля и управления;
-
обработка команд ДСП;
-
регистрация событий;
-
обработка сигналов о неисправностях;
-
отображения журнала событий и списка неисправностей.
Подсистема диагностики в МПЦ представлена в виде терминала электромеханика (АРМ ШН), на который поступает информация о различных неисправностях в системе, например обрыве петли связи, перегорание лампы на светофоре, потеря контроля стрелки или понижение изоляции кабеля.
Пользовательские интерфейсы и общие принципы построения АРМ ДСП и АРМ ШН во многом схожи.
Между АРМами установлена граница зоны ответственности, с АРМа ШН невозможно управления станцией, механику доступен только режим наблюдателя, с расширенными возможностями анализа и контроля событий, А так же использование прикладных программ MultiRcosPlayback и FeuSurf, для расследования случаев отказа и контроля работоспособности системы в целом.
Реализация логических взаимозависимостей между станционными объектами в соответствии с требованиями безопасности движения поездов осуществляется на уровне подсистемы логических зависимостей. Технической основой этого подуровня МПЦ является центральный процессор, структура аппаратного и программного обеспечения которого обеспечивает заданные параметры безотказности и безопасности.
Ядром системы является компьютер централизации (КЦ) который проверяет все условия для безопасного движения поездов и с помощью системы объектных контроллеров управляет станционными объектами. Аппаратная компоновка КЦ приведена на рис 1 . КЦ состоит из модулей установленных в 19 дюймовый блок, содержащую пассивную объединительную плату для межмодульной связи и распределения питания. КЦ занимает как левую, так и правую половины корпуса.

Рис 1. Внешний вид процессорного модуля централизации
Модули устанавливаются парами, что соответствует основному и резервному комплекту.
В состав процессорного блока входят следующие модули:
• питания (РSМ);
• дисковый и сетевой (DЕМ);
• центрального процессора (СРМ);
• ввода-вывода (IOМ).
Модуль питания формирует напряжения для функционирования ПМЦ:
+5 В/10 А; +12 В/30 А; -12 В/0,5 А, а также обеспечивает защиту от короткого замыкания, индикацию пропадания выходного напряжения, сохранение в течение 30 мс выходного напряжения при пропадании входного.
Дисковый и сетевой модуль состоит из двух отдельных подсистем: сетевого интерфейса и жесткого диска. Подсистема сетевого интерфейса предназначена для подключения КЦ к различным внешним устройствам, например к АРМ ШН, а на этапе разработки — к общей сети предприятия. Разъем может также использоваться для подключения к системе АРМ ДСП.
Подсистема жесткого диска содержит SCSI-контроллер, внутренний жесткий диск и внешний SCSI-разъем, к которому можно подключить до пяти различных SCSI-совместимых устройств, например жесткие диски, СD-устройства и ленточные накопители.
Модуль ввода-вывода обеспечивает связь с объектными контроллерами. Для этого в состав каждой платы входят: COS порт (RS232);
Для непосредственного контроля и управления станционными объектами (стрелками, светофорами, рельсовыми цепями переездами и т.д) служит система объектных контроллеров. Система объектных контроллеров
Система объектных контроллеров (СОК 950) является частью микропроцессорной централизации Ebilock 950.
Каждый объектный контроллер может управлять и контролировать один или несколько напольных объектов в зависимости от их типа, используя для этого микропроцессор со специальной программой.
Объектный котроллер – устройство, осуществляющее контроль и упражнение специфичным напольным оборудованием. Объектные контроллеры от концентратора принимают приказы, передаваемые компьютером централизации, и преобразуют их в электрические сигналы для управления напольными устройствами. Аналогичным образом сигналы, принятые от напольного оборудования, преобразуются в телеграммы его состояния и через концентраторы передаются в компьютер централизации, Отказы в объектном контроллере приводят к изоляции соответствующего подключенного напольного оборудования, При этом данная ситуация обрабатывается безопасным образом.
В системе Ebilock 950 различаю следующие типы объектных контроллеров:
Сигнальный объектный контроллер позволяет включить в централизацию поездные и маневровые сигналы, применяемые на ж.д., а также, позволяет получит информацию о состоянии контактов реле , при помощи безопасных контактных входов. Он контролирует состояние сигналов, управляет ими и служит интерфейсом между центральным компьютером и напольными объектами. В зависимости от того, какое показание необходимо обеспечить на данном сигнале к ОК могут быть посланы различные приказы, и зажигающие соответствующие данному приказу лампы на сигнале.
Сигнальный объектный контроллер может состоять из платы ССМ и одной, либо двух плат LMP.
Стрелочный объектный контроллер выполняет функции: определение состояния стрелки (левое, правое, потеря контроля, взрез), управление электродвигателем стрелочного электропривода в соответствии с командами КЦ при централизованном управлении или состоянии кнопок местного управления в соответствующем режиме, контроль состояния стрелочных замков. Так же стрелочный объектный контроллер позволяет получить информацию о состоянии контактов, подключенных к платам ССМ и MOT1 данного контроллера. Стрелочный объектный контроллер может состоять из платы ССМ и одной, либо двух плат МОТ1.
Релейный объектный контроллер позволяет включить в централизацию различные реле, применяемые на ж.д., а также позволяет получить информацию о состоянии контактов реле, при помощи безопасных контактных входов. Он позволяет ставить под ток и обесточивать реле, в зависимости от приказа дежурного по станции, а так же служит интерфейсом между центральным компьютером и напольными объектами (реле).
Релейный объектный контроллер может состоять из одной платы ССМ, а так же из одной платы ССМ, одной двух или трех плат SRC.
Объектный контроллер не неответственного ввода/вывода
обеспечивает управление выходным напряжением для схем и устройств, не предъявляющих специальных требований по безопасности. Типичными примерами различного применения этого тина котроллеров является построение систем обогрева и обдува стрелок.
Таким образом, в зависимости от контролируемых и управляемых объектов электрической централизации, объектный контроллер будет укомплектован следующими платами.
Плата ССМ. Безопасным процессорным ядром для каждого объектного контроллера является плата Контроллера и Проверки Контактов (СCМ), которая построена на основе микроконтроллера. Плата ССМ содержит четыре канала безопасной проверки состояния контактов (на пример для определения состояния путевых реле), шесть не ответственных выходов, и два не ответственных входа.
Плата СОМ. Плата Связи и Модемов (СОМ) управляет внешними связевыми интерфейсами: модемное соединение с петлей связи с CIS, однонаправленный интерфейс RS-232 для подключения анализатора протокола и двунаправленный интерфейс RS-232 для подключения оборудования РСМ модуляции или персонального компьютера для целей диагностики работы системы. Каждая плата СОМ оборудована выключателем питания. Две платы СОМ вместе с платой ОСТ образуют CCU.
Плата LMP. Плата Управления Лампами (LMP) используется для управления светофорами и световыми индикаторами. Один объектный контроллер может управлять двенадцатью нитями ламп, как максимум, сгруппированных в шесть независимых физических объектов (используется одна плата ССМ и две платы LMP). Каждая плата LMP содержит два специализированных выхода для управления стоповыми огнями и четыре выхода для управления разрешающими огнями.
Плата МОТ1. Плата Управления Мотором типа 1 (MОТ 1) используется для управления моторами стрелочных приводов переменною тока. Один объектный контроллер может управлять одиночной стрелкой использующей до четырех приводов (одна плата ССМ и одна плата MOT1) или спаренными стрелками, содержащими до двух приводов каждая (одна плата ССМ и две платы МОТ1). Приведенные данные основываются на предположении, что механизм выключения является частью стрелочного привода и электрическая нагрузка находится внутри предопределенного диапазона. В противном случае, емкость по управлению уменьшается на половину или даже более, в зависимости от характеристик нагрузки.
Плата ОСТ. Плата Распределения Питания (ОСТ), обеспечивает распределение питания (24 В постоянного тока), поступающего от источника питания для всех объектных контроллеров установленных в одной полке. Две платы ОСТ могут быть соединены между собой для обеспечения расширения канала связи концентратор – объектные контроллеры, что обеспечит подключение к одному концентратору до восьми объектных контроллеров, установленных в двух полках. Каждая плата ОСТ имеет четыре выключателя питания, которые предназначены для включения питания соответствующих объектных контроллеров, установленных в данной полке. Данные выключатели используются в процессе обслуживания системы.
Плата SRC. Плата Безопасного Управления Реле (SRC) обеспечивает активацию/отключение реле безопасным образом. Один объектный контроллер может управлять 12 выходами, как максимум (одна плата ССМ и три платы SRC), при этом каждая плата SRC содержит 4 выхода. Типичным примером использования плат SRC является построение интерфейсов с существующими релейными системами типа автоблокировки или переездной сигнализации.

Рис. 2. Структурная схема МПЦ Ebilock-950
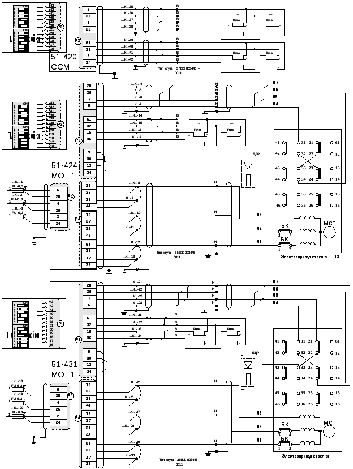
Схема подключения стрелочного ОК.

Схема подключения сигнального ОК.