ТАУ лаба 1 вариант 9
.docx
Лабораторная работа №1
Моделирование звеньев автоматических систем
Вариант 9
Выполнил:
П.Н. Чехин, студент группы МР-10-1
Принял:
Н.Н. Куцый
Цель работы
Ознакомление с методами моделирования автоматических систем; непосредственное моделирование типовых звеньев; расчет временных характеристик звеньев.
Задана передаточная функция колебательного звена:
Значения параметров звена:



Представим уравнения моделирования на основе способа комбинирования производных:
Здесь имеем:




Введем новую переменную
где
 - оператор дифференцирования.
- оператор дифференцирования.
В результате получаем

Сделаем ввод новых переменных


Тогда получаем
Применим метод Рунге-Кутты

Выбор шага интегрирования при численном интегрировании дифференциальных уравнений автоматических систем можно провести по следующей приближенной методике:
Относительную
допустимую методическую погрешность
 ,
задаваемую из практических соображений,
примем равной 0.001. Величина
,
задаваемую из практических соображений,
примем равной 0.001. Величина
 – наибольший по модулю корень
характеристического уравнения.
– наибольший по модулю корень
характеристического уравнения.

Интервал интегрирования L в звеньях второго порядка оценивается как

В
данном случае выбираем
 .
.
Листинг фрагмента программы, относящегося к моделированию заданного звена:
const
Lin = 8.75; //интервал моделирования
dt = 0.032; //шаг интегрирования
ksi=0.4;
k=0.1;
T=0.5;
g=1.0;
var
sumdt, //текущее время моделирования
y,y1,y2,ypr, //переходная функция
u,u1,u2,
k11,k12,k21,k22,k31,k32,k41,k42,
w //весовая функция
: Real;
begin
////////////////////////////////////////////
//НАЧАЛЬНЫЕ УСЛОВИЯ
sumdt:=0;
y:=0; ypr:=0; y1:=0; y2:=0;
////////////////////////////////////////////
//НАЧАЛО МОДЕЛИРОВАНИЯ
REPEAT
////////////////////////////////////////////
//УРАВНЕНИЯ ПЕРЕХОДНОГО ПРОЦЕССА
k11:=u2*dt;
k12:=(g-2*ksi/T*u2-1/sqr(T)*u1)*dt;
k21:=(u2+(k12/2))*dt;
k22:=(g-(2*ksi/T)*(u2+k12/2)-(1/(T*T))*(u1+k11/2))*dt;
k31:=(u2+(k22/2))*dt;
k32:=(g-(2*ksi/T)*(u2+k22/2)-(1/(T*T))*(u1+k21/2))*dt;
k41:=(u2+k32)*dt;
k42:=(g-(2*ksi/T)*(u2+k32)-(1/(T*T))*(u1+k31))*dt;
u1:=u1+(k11+2*k21+2*k31+k41)/6;
u2:=u2+(k12+2*k22+2*k32+k42)/6;
y:=k/sqr(T)*u1;
w:=(y-ypr)/dt;
ypr:=y;
//ВЫВОД ГРАФИКОВ
Graphic1.AddXY(sumdt,Y); //первый график
Graphic2.AddXY(sumdt,w); //второй график
Graphic3.AddXY(sumdt,g); //третий график
sumdt:=sumdt+dt; //увеличение текущего времени на dt
UNTIL sumdt>=Lin;
//КОНЕЦ МОДЕЛИРОВАНИЯ
////////////////////////////////////////////
end;
end.
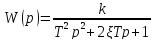
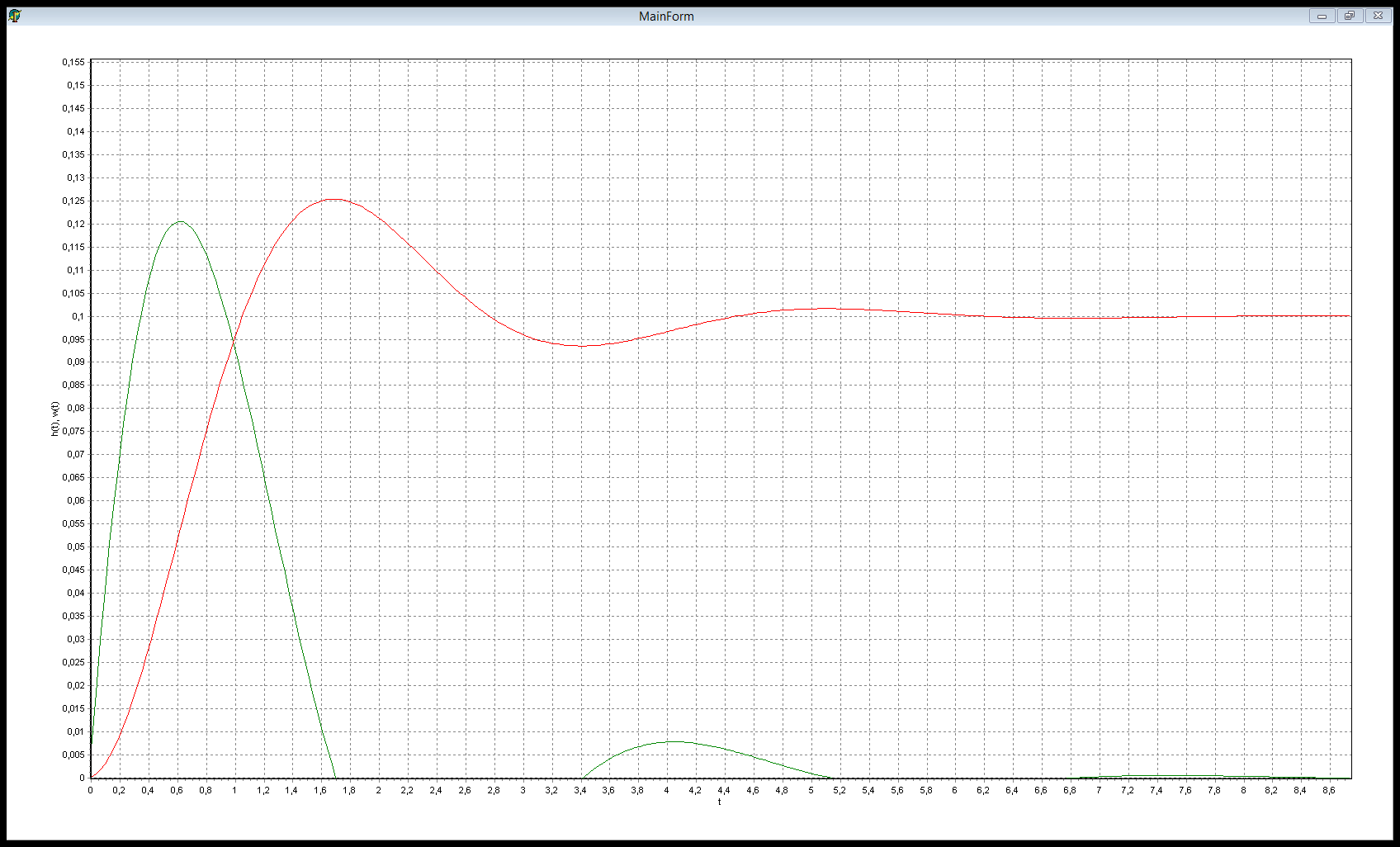
Полученные графики переходной и весовой функций
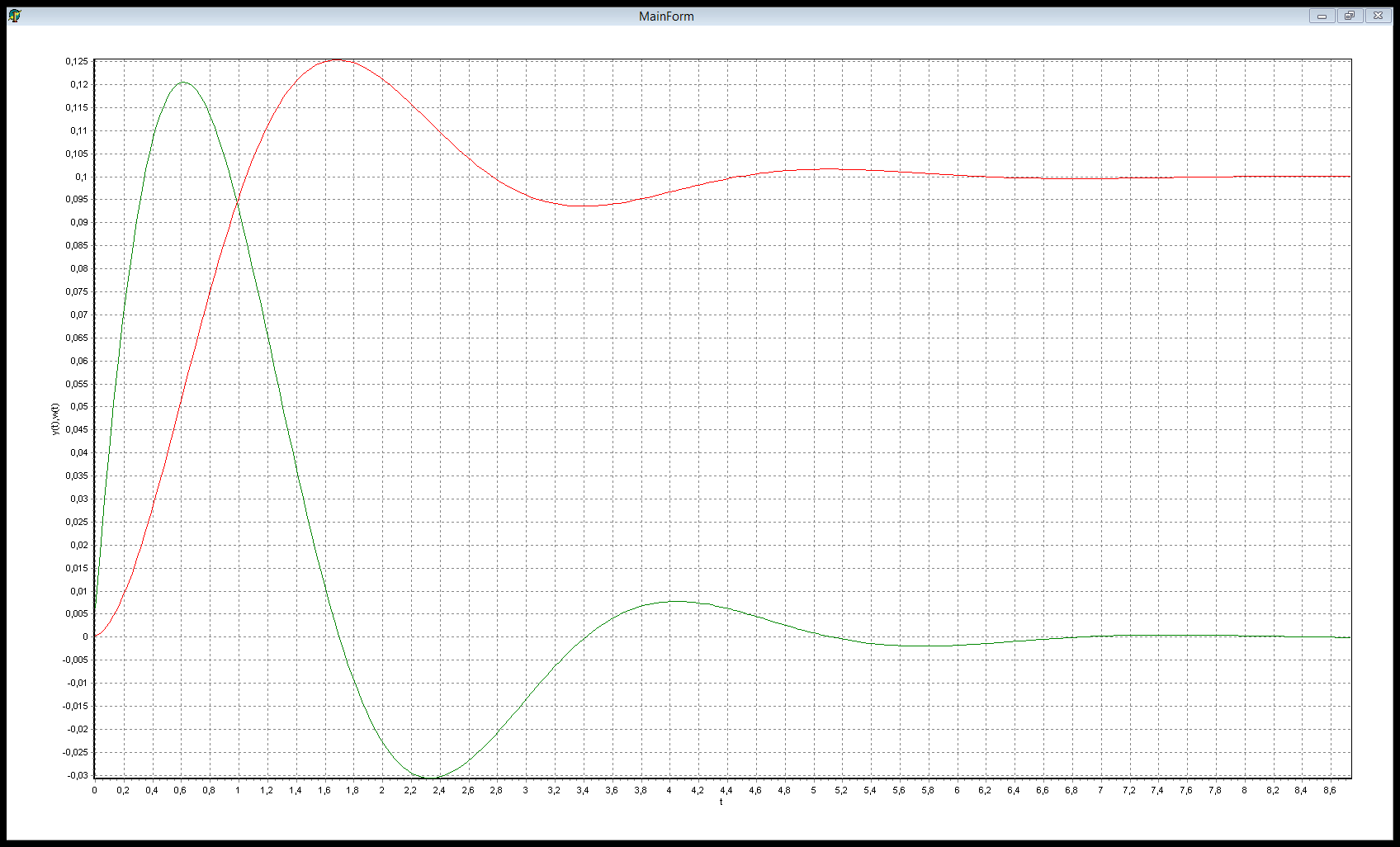
Из графика переходной функции определяем следующие временные характеристики:




Отсюда, находим:



Полученные параметры практически совпали с заданными значениями.
k










Получение аналитических выражений переходной и весовой функций классическим методом
Дифференциальное уравнение передаточной функции звена задано в виде
Запишем характеристическое уравнение:
Корни характеристического уравнения
Введем обозначение


Тогда

Общее решение однородного дифференциального уравнения


Запишем систему уравнений
Производные записываются в виде


Отсюда имеем:

Выразим
из первого уравнения

Подставим во второе уравнение:

Выполним некоторые преобразования

Отсюда

Проинтегрируем
полученное выражение и найдем


Из первого уравнения имеем
Подставим
во второе уравнение и выразим



Проинтегрируем
полученное выражение и найдем


Имеем



Определим постоянные, исходя из начальных условий



Производная y’

Отсюда


Возвращаемся к выражению для y

Рассмотрим отдельно
Тогда окончательно, переходная функция

Весовая функция

Выполним построение графиков полученных функций: