


Estimating Scores—713
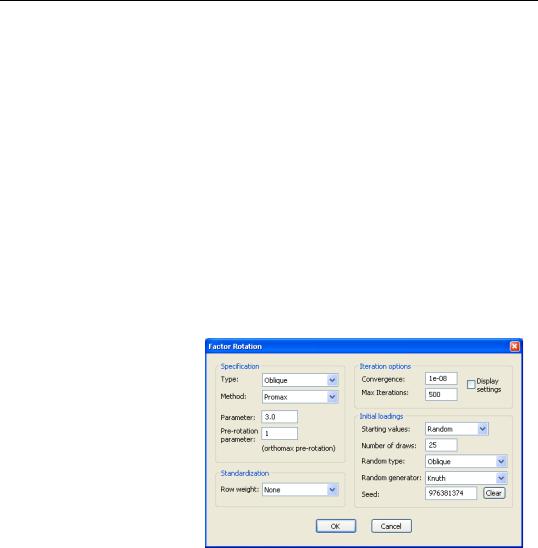
•You may instruct EViews to use an initial random rotation by selecting Random in the Starting values combo. The dialog changes to prompt you to specify the number of random starting matrices to compare, the random number generator, and the initial seed settings. If you select random, EViews will perform the requested number of rotations, and will use the rotation that minimizes the criterion function.
As with the random number generator used in parallel analysis, the value of this initial seed will be saved with the factor object so that by default, subsequent rotation will employ the same random values. You may override this initialization by entering a value in the Seed edit field or press the Clear button to have EViews draw a new random seed value.
•You may provide a user-specified initial rotation. Simply select User-specified in the Starting values combo, the provide the name of a m ¥ m matrix to be used as the starting T .
•Lastly, if you have previously performed a rotation, you may use the existing results as starting values for a new rotation. You may, for example, perform an oblique Quartimax rotation starting from an orthogonal Varimax solution.
Once you have specified your rotation method you may click on OK. EViews will estimate the rotation matrix, and will present a table reporting the rotated loadings, factor correlation, factor rotation matrix, loading rotation matrix, and rotation objective function values. Note that the factor structure matrix is not included in the table output; it may be viewed separately by selecting View/Structure Matrix from the factor object menu.
In addition EViews will save the results from the rotation with the factor object. Other routines that rely on estimated loadings such as factor scoring will offer you the option of using the unrotated or the rotated loadings. You may display your rotation results table at any time by selecting View/Rotation Results from the factor menu.
Estimating Scores
Factor score estimation may be performed as a factor object view or procedure.
Viewing Scores
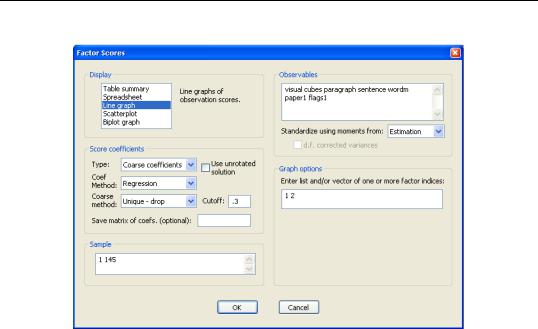
To display score coefficients or scores, click on the Score button on the factor toolbar, or select View/Scores... from the factor menu.

Estimating Scores—715
one’s regression, Ideal variables (Harmon’s idealized variables), Bartlett WLS (Bartlett weighted least squares), Anderson-Rubin (Ten Berge et al. generalized Anderson-Rubin-McDonald), and Green (Green, MSE minimizing).
•If you select Coarse coefficients or Coarse loadings, EViews will prompt you for a coarse method and a cutoff value.
Simplified coefficient weights will be computed by recoding elements of the coefficient or loading matrix. In the Unrestricted method, values of the matrix that are greater (in absolute value) than some threshold are assigned sign-preserving values of -1 or 1; all other values are recoded at 0.
The two remaining methods restrict the coefficient weights so that each variable loads on a single factor. If you select Unique - recode, only the element with the highest absolute value in a row is recoded to a non-zero value; if you select Unique - drop, variables with more than loading in excess of the threshold are set to zero.
See Grice (2001) for discussion.
You may instruct EViews to save the matrix of scores coefficients in the workfile by entering a valid EViews object name in the Save matrix of coefs edit field.
Scores Data
You will need to specify a set of observable variables to use in scoring and a sample of observations. The estimated scores will be computed by taking linear combination of the standardized observables over the specified samples.
If available, EViews will fill the Observables edit field with the names of the original variables used in computation. You will be prompted for whether to standardize the specified data using the moments obtained from estimation, or whether to standardize the data using the newly computed moments obtained from the data. In the typical case, where we score observations using the same data that we used in estimation, these moments will coincide. When computing scores for observations or variables that differ from estimation, the choice is of considerable importance.
If you have estimated your object from a user-specified matrix, you must enter the names of the variables you wish to use as observables. Since moments of the original data are not available in this setting, they will be computed from the specified variables.
Graph Options
When displaying graph views of your results, you will be prompted for which factors to display; by default, EViews will graph all of your factors. Scatterplots and biplots provide additional options for handling multiple graphs, for centering the graph around 0, and for biplot graphs, labeling obs and loading scaling that should be familiar from our discussion of prin-