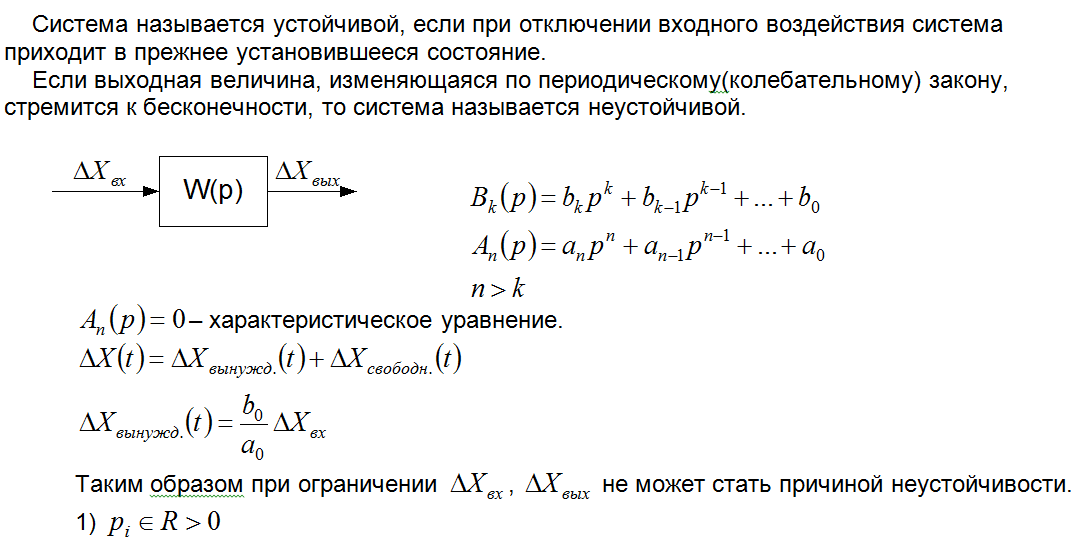
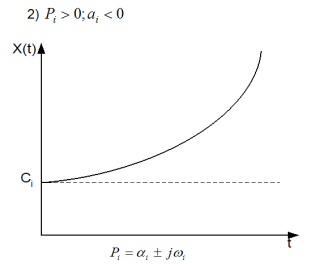
30. Математические условия устойчивости линейных систем

Билет 16
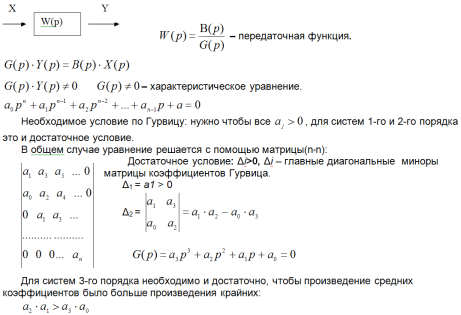
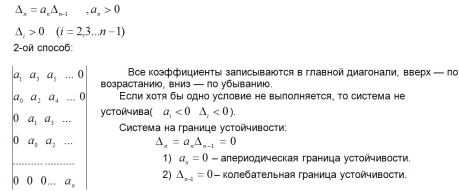
31. Алгебраический критерий устойчивости Гурвица
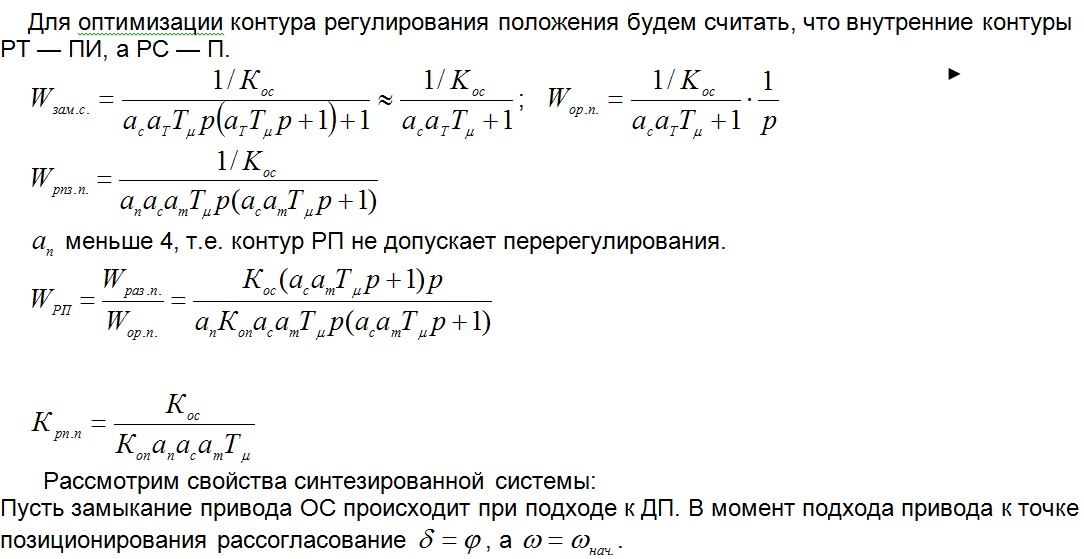
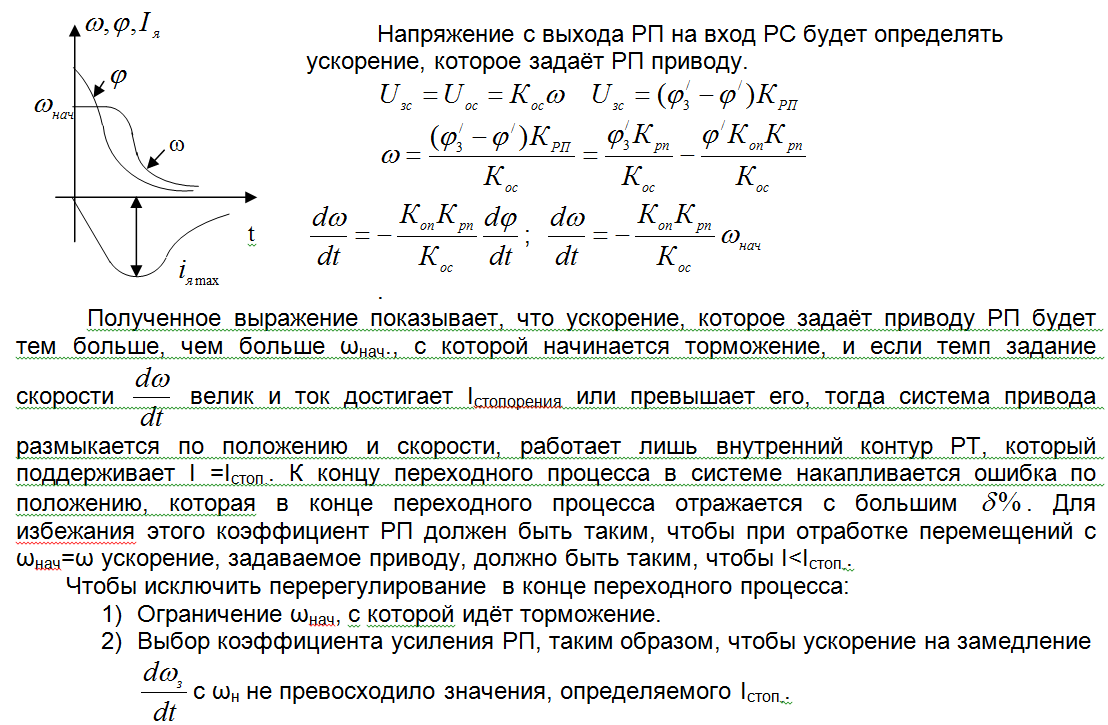
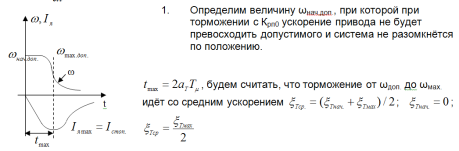
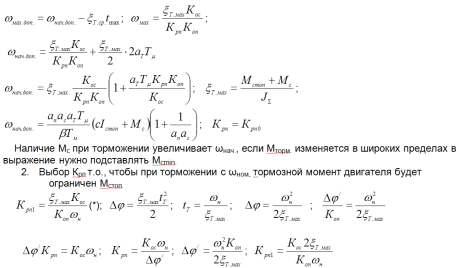
32. Регулирование положения. Параболический регулятор положения
![]()
Билет 17
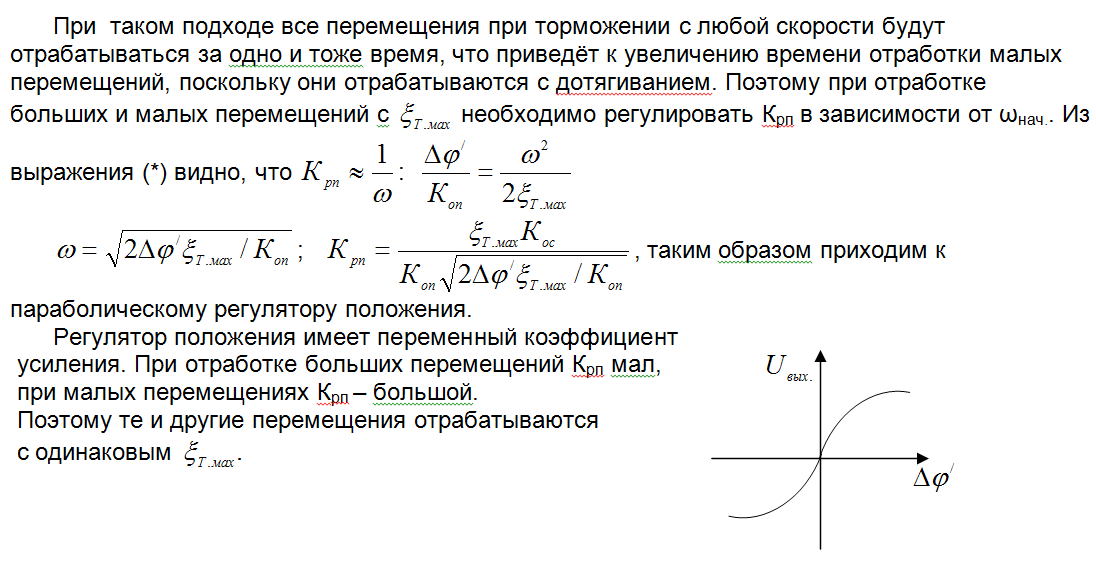
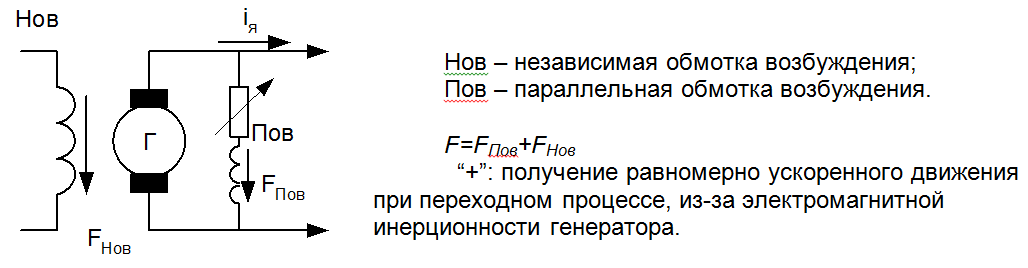
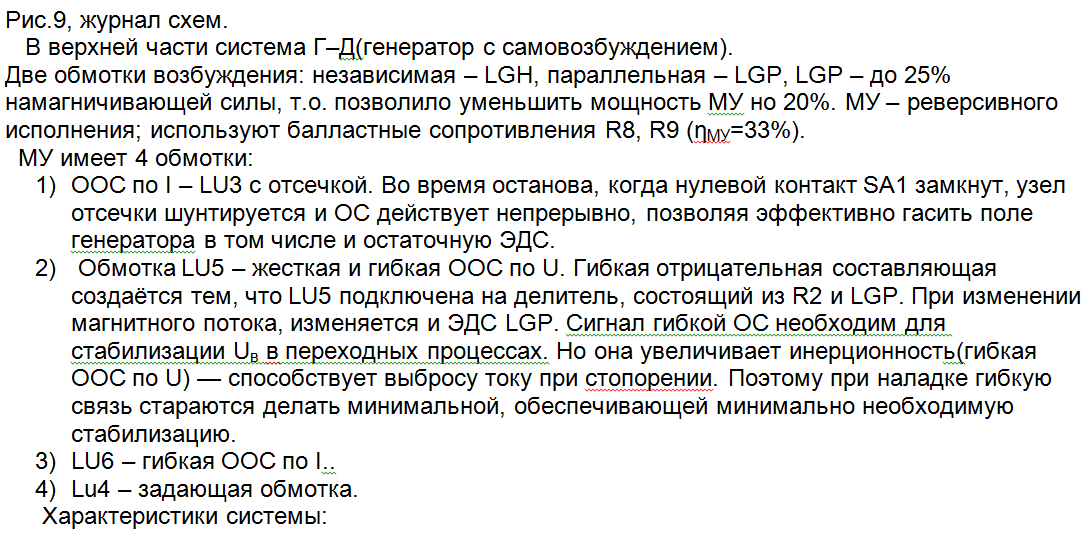
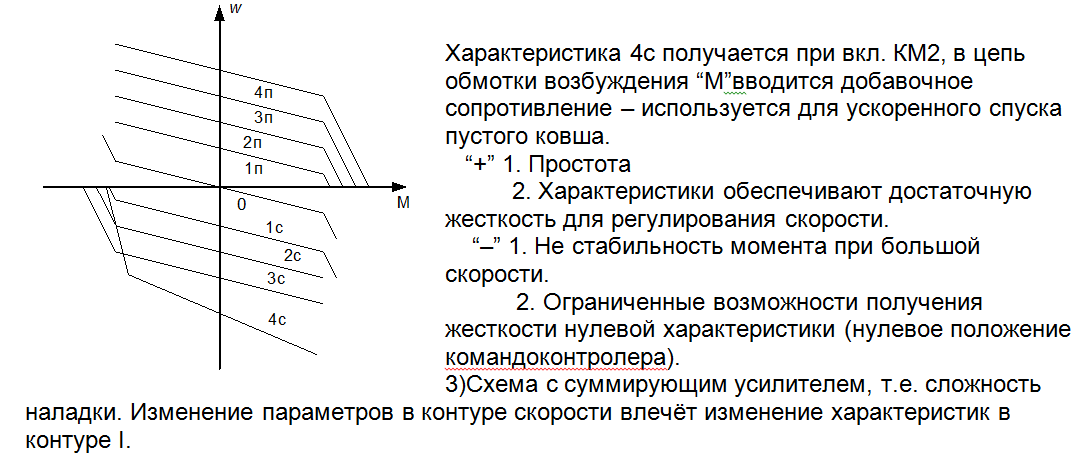
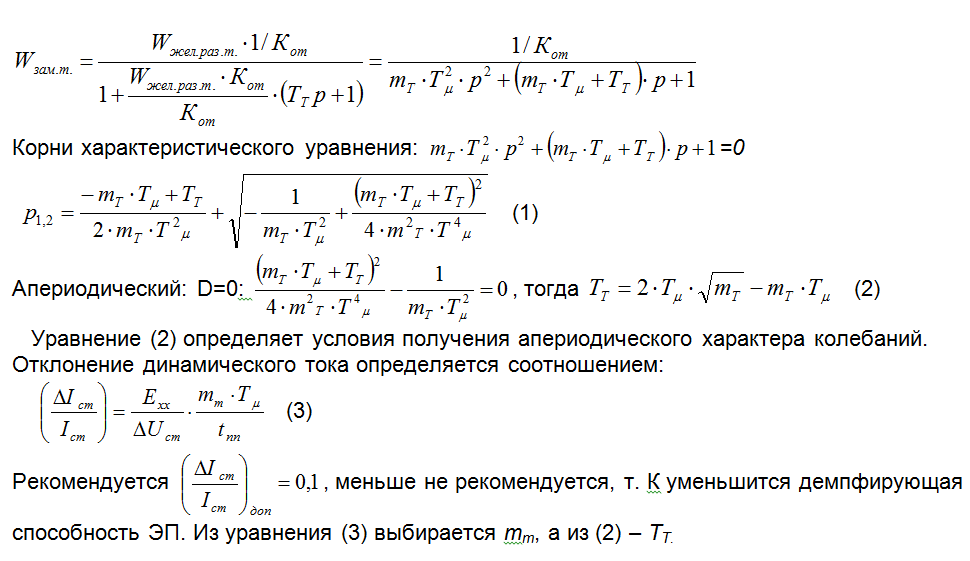
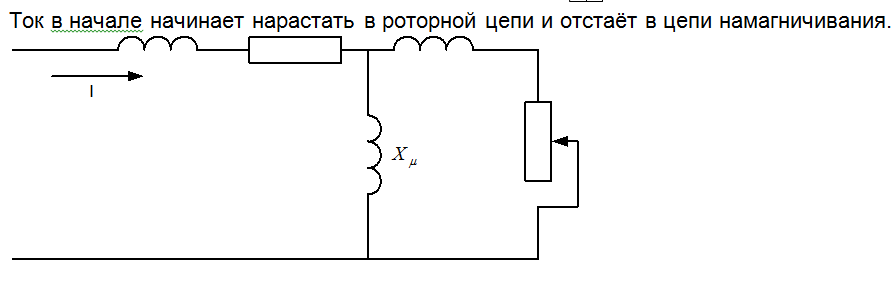
33. Требования, предъявляемые к электроприводу экскаваторов. ЭП механизма подъёма экскаватора с магнитным пускателем
 34.
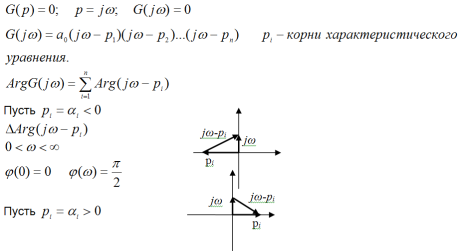
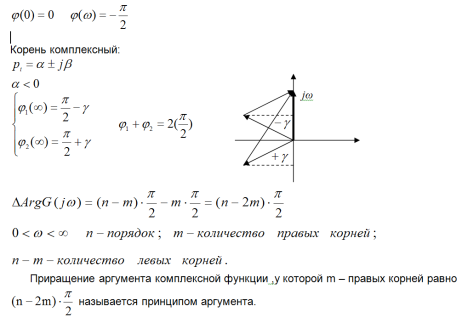
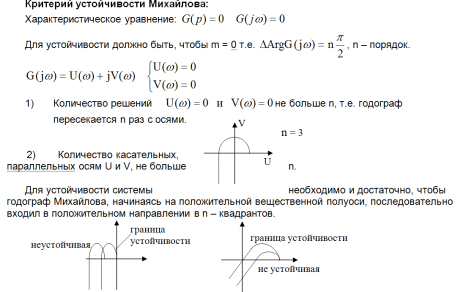
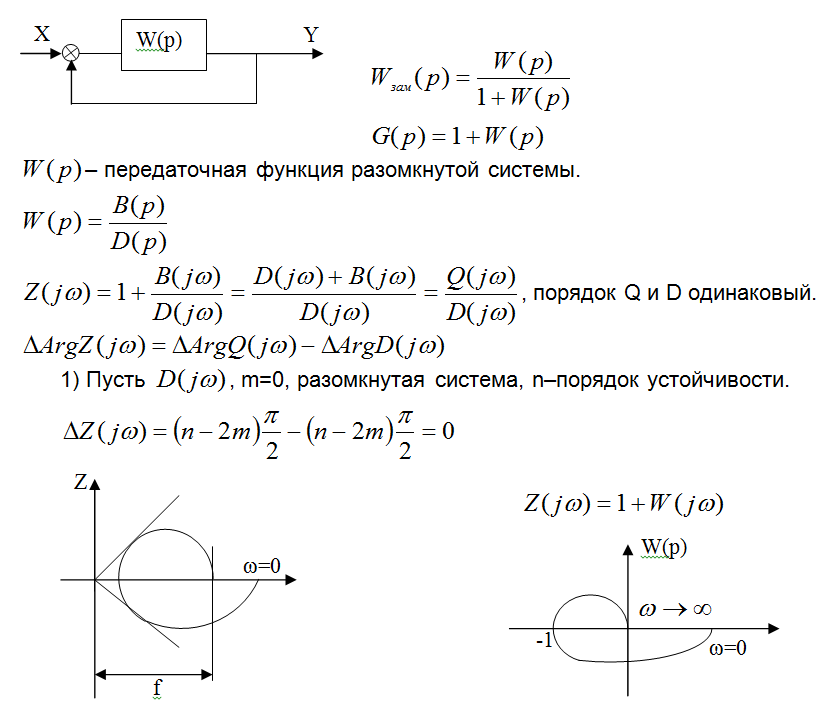
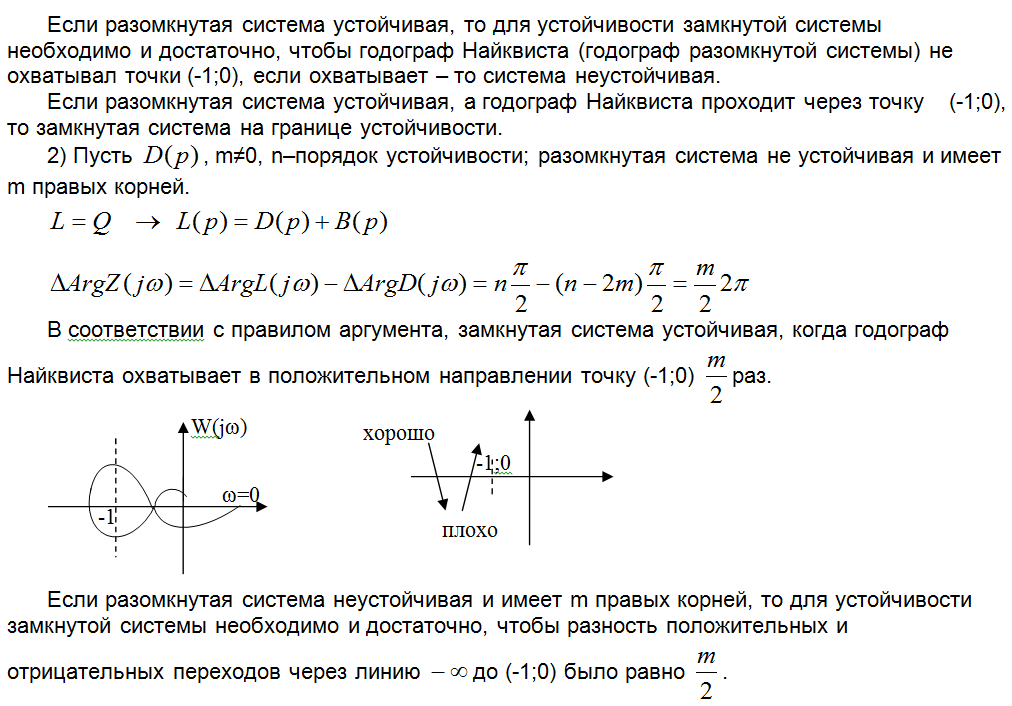
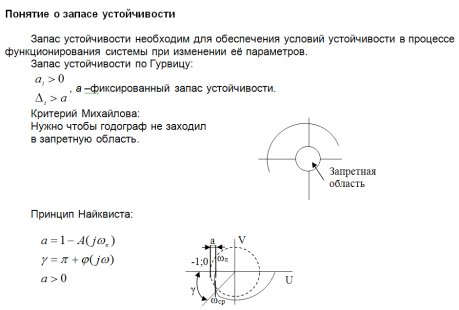
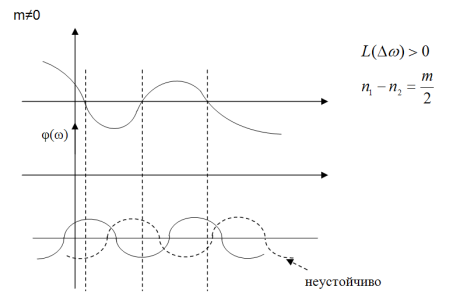
Принцип аргумента. Частотный критерий
устойчивости Михайлова
34.
Принцип аргумента. Частотный критерий
устойчивости Михайлова
![]()
Билет 18
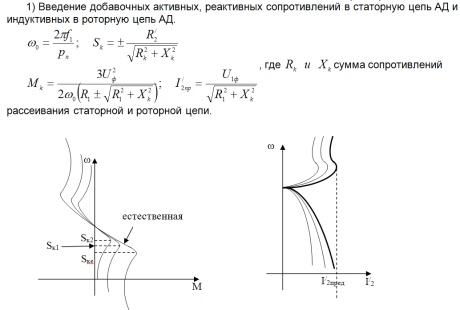
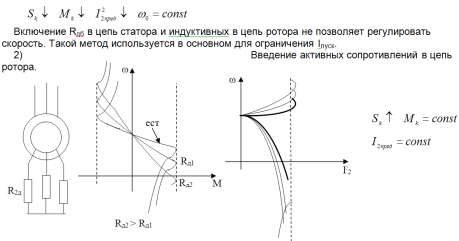
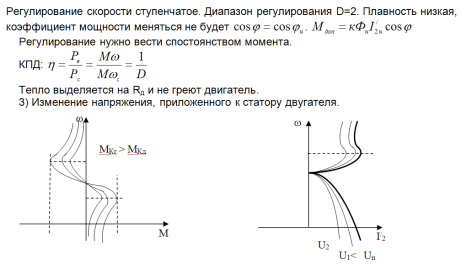
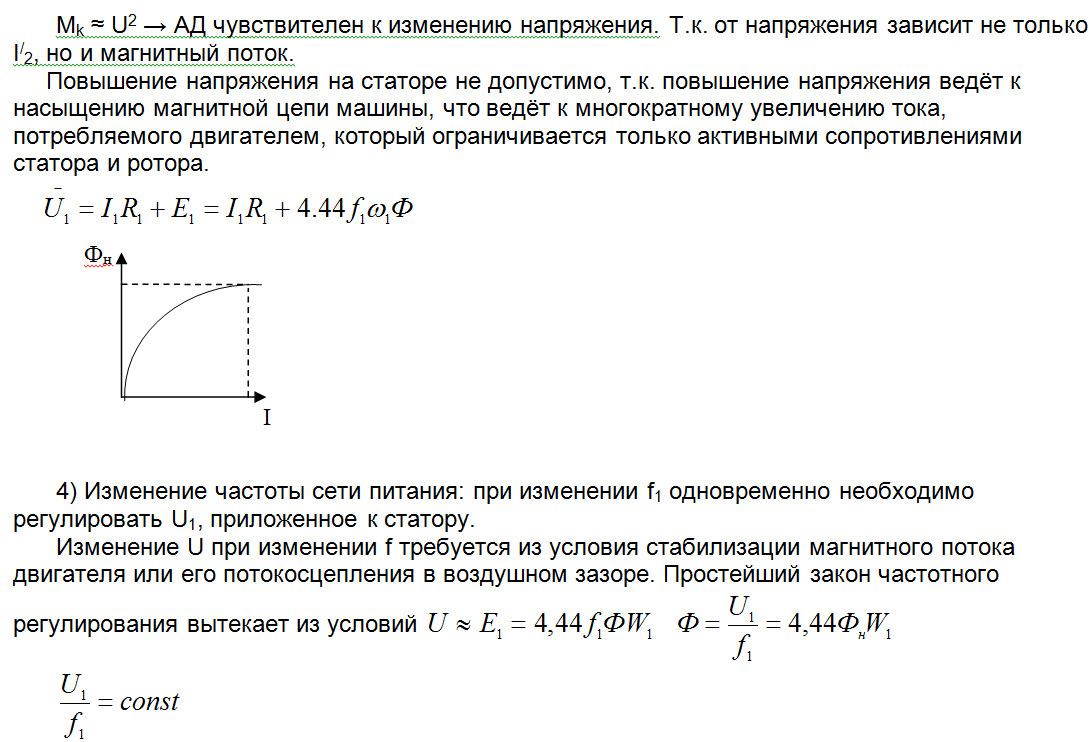
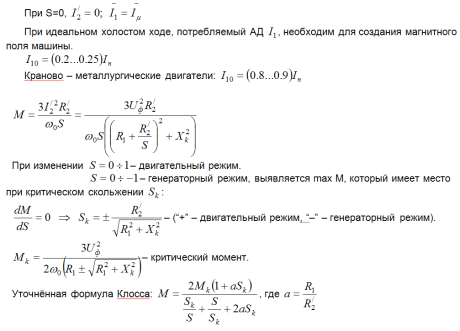
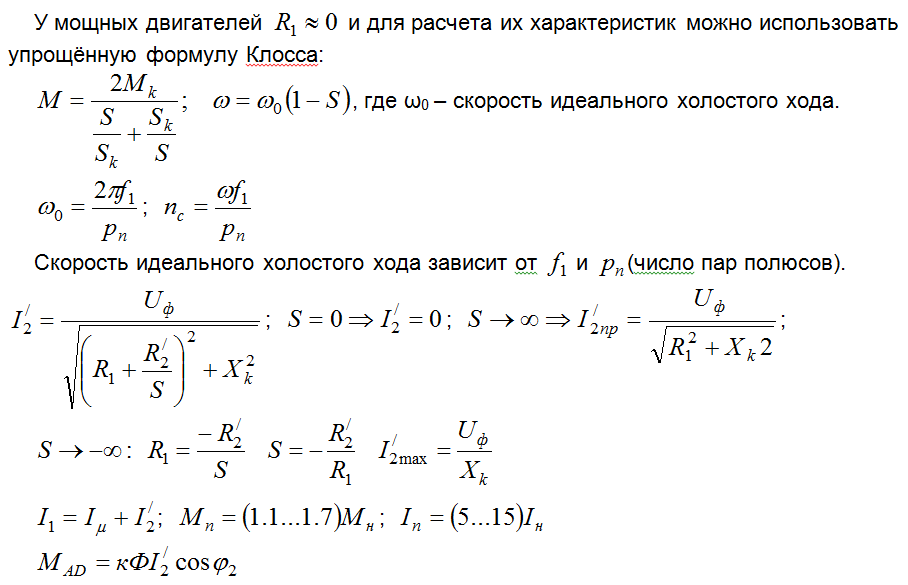
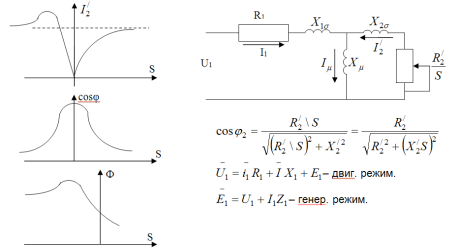
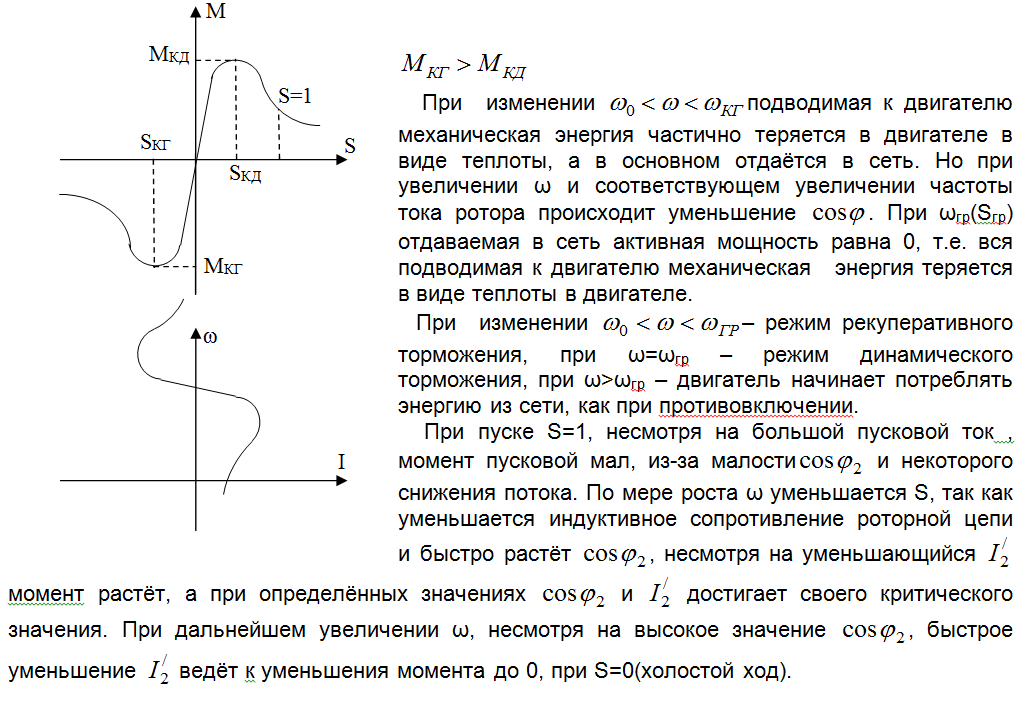
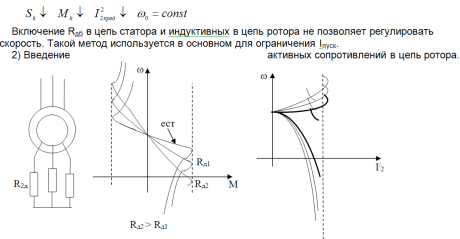
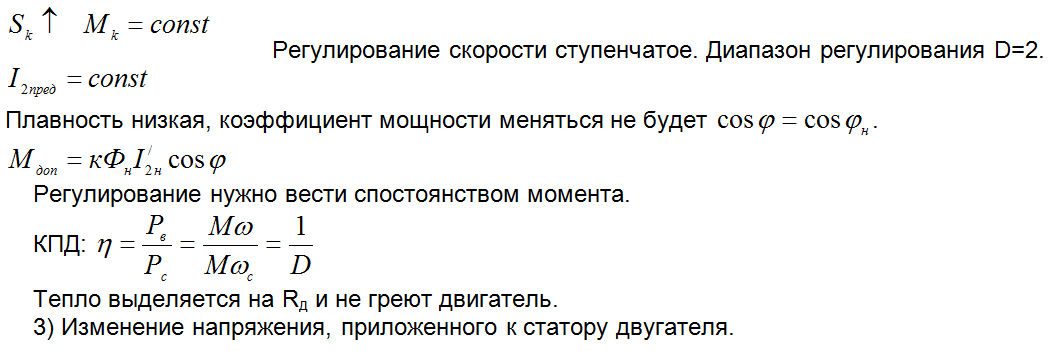
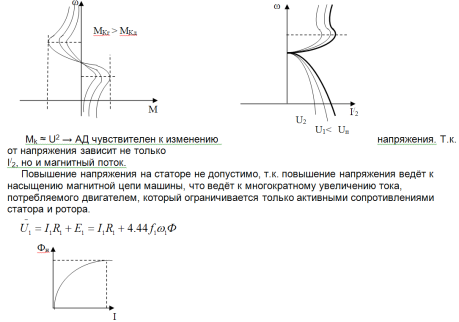
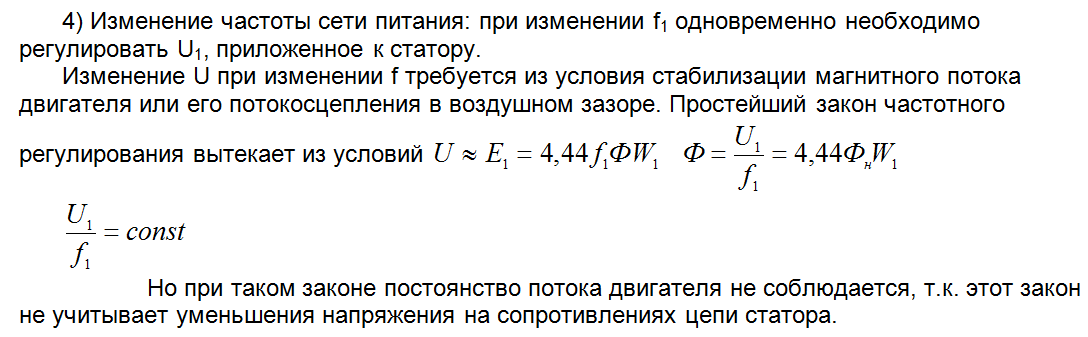
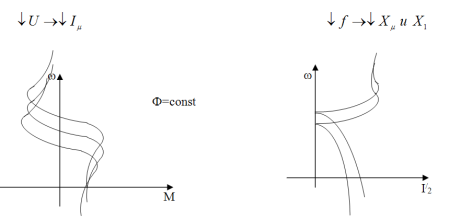
35. Влияние U1, X1, R1, f2 на вид механических характеристик АД
![]()

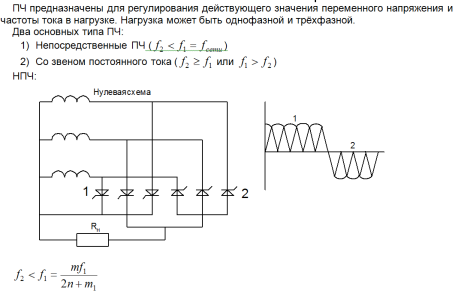
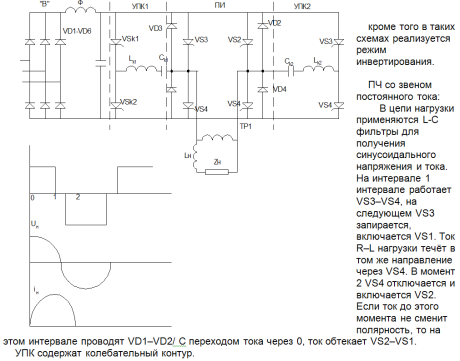
36. Каким целям служит преобразователь частоты (ПЧ) со звеном постоянного тока и ПЧ непосредственного преобразования (НПЧ) с тиристорными ключами. В чём состоит отличие их в плане схемотехнического построения

![]()
Билет 19
37. Электромеханические свойства АД
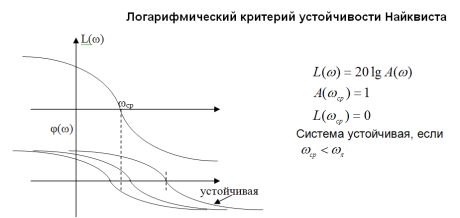
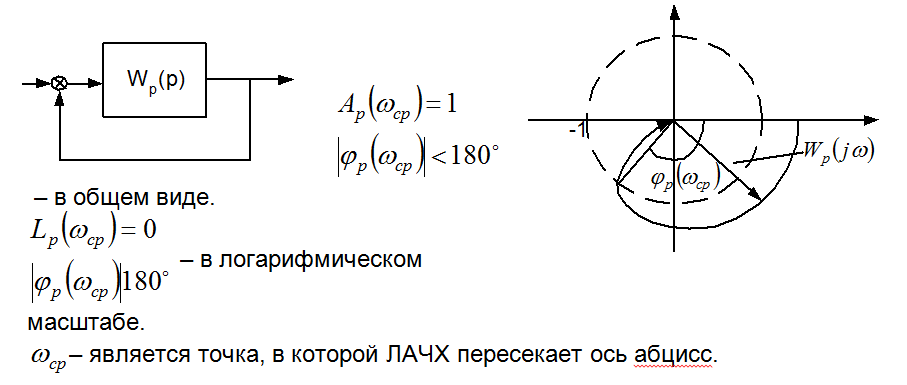
38. Частотный критерий устойчивости Найквиста
Билет 20
39. Оптимальная структура экскаваторного ЭП. Режим к.з



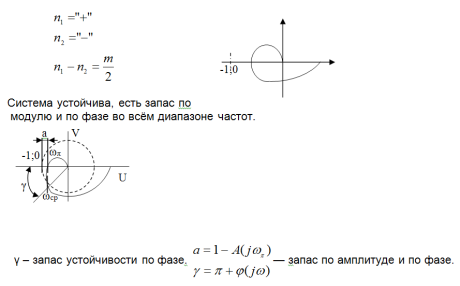
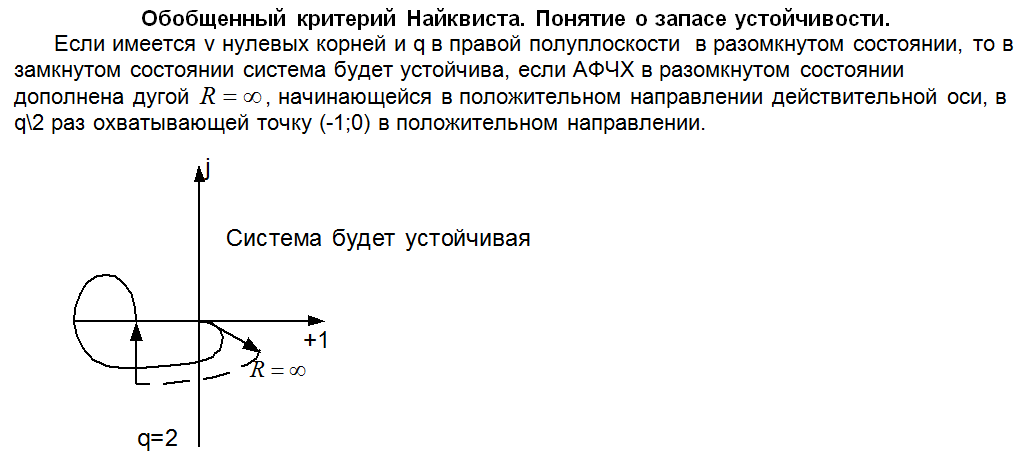
40. Обобщённый критерий Найквиста. Понятие о запасе устойчивости

Билет 21
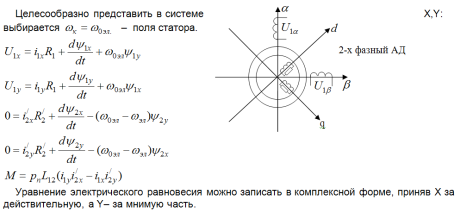
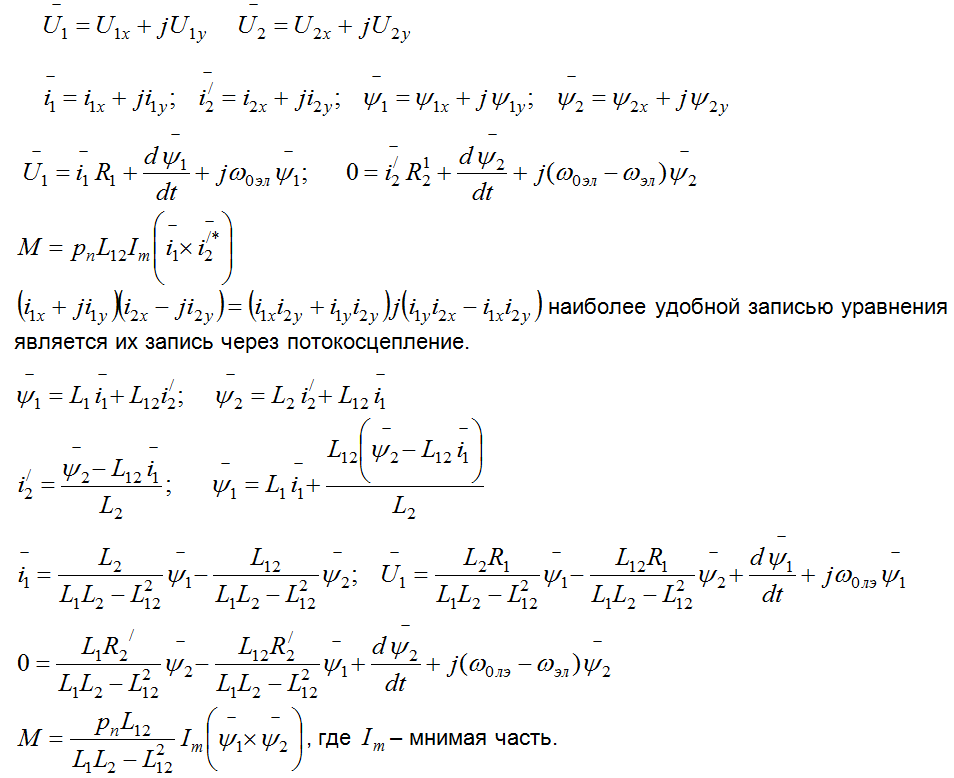
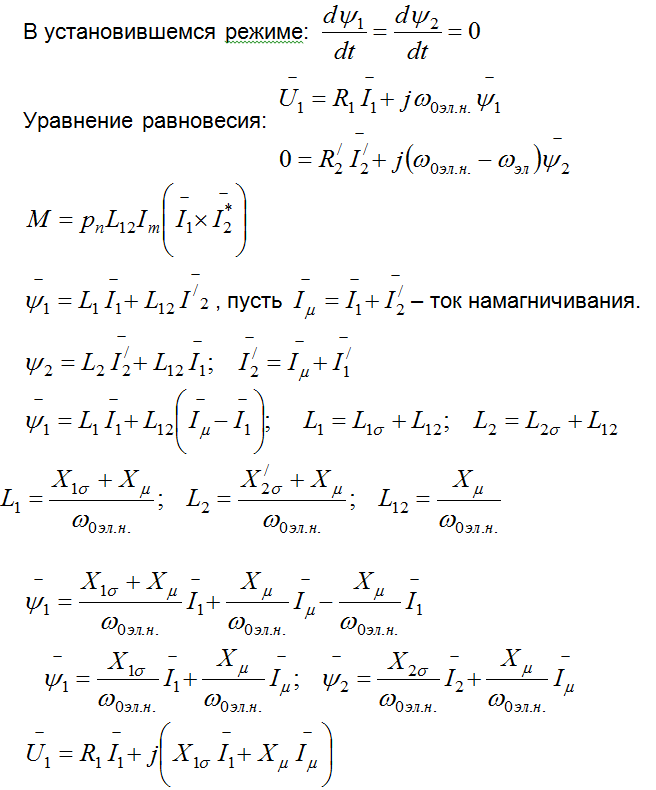
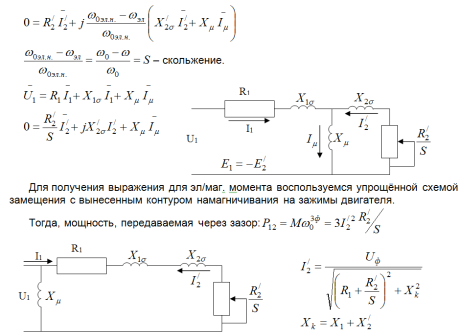
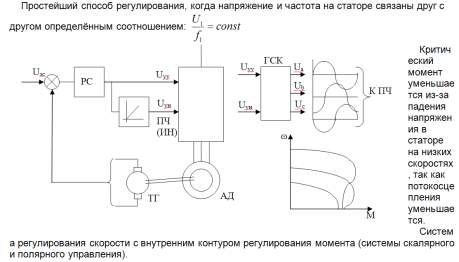
41. Система скалярного управления АД

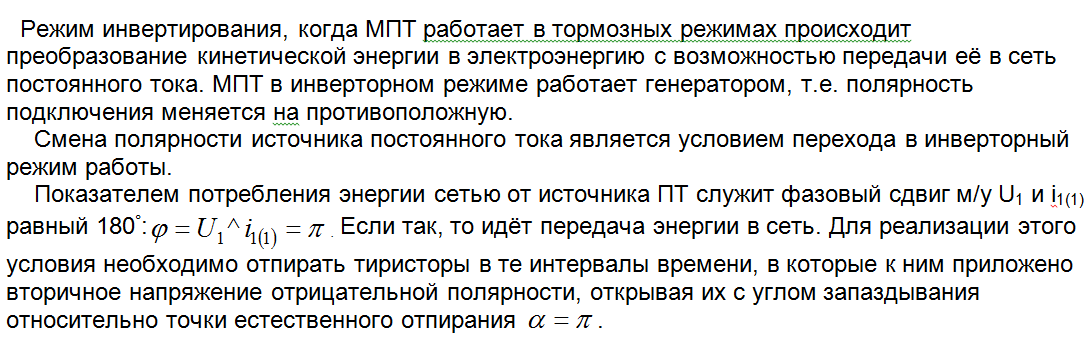
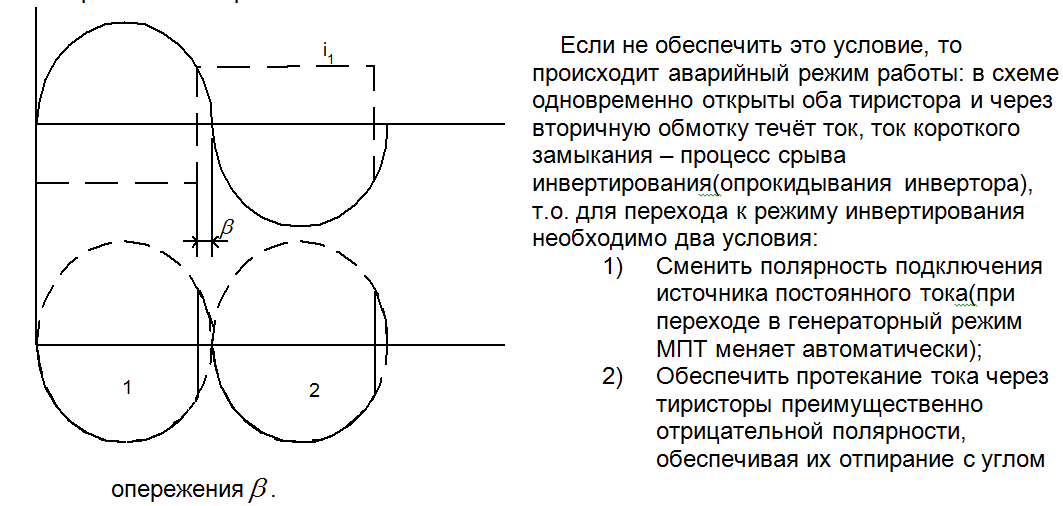
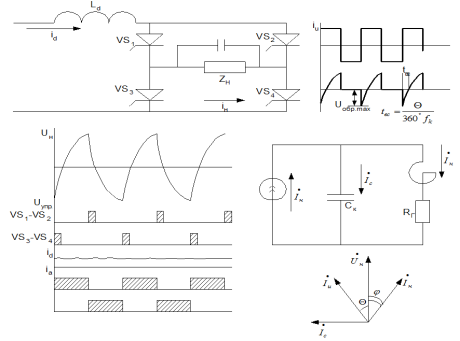
41. Изобразить обобщённую регулировочную характеристику управляемого преобразователя. Определить критерий выбора угла опережения отпирания тиристоров в инверторном режиме β

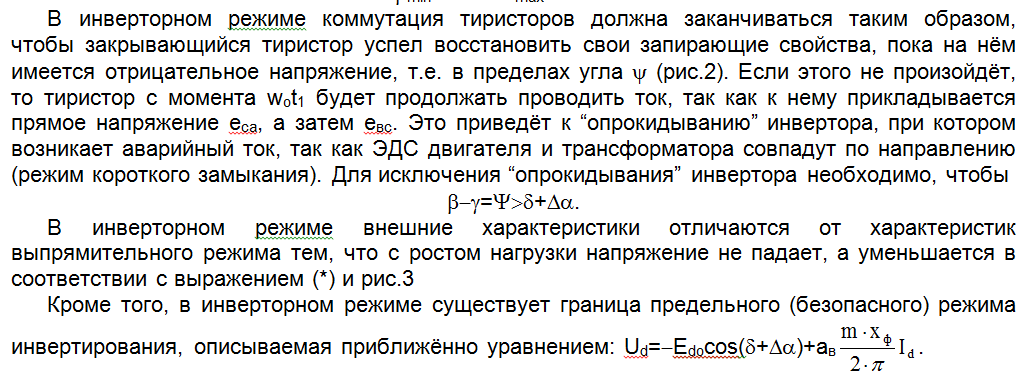
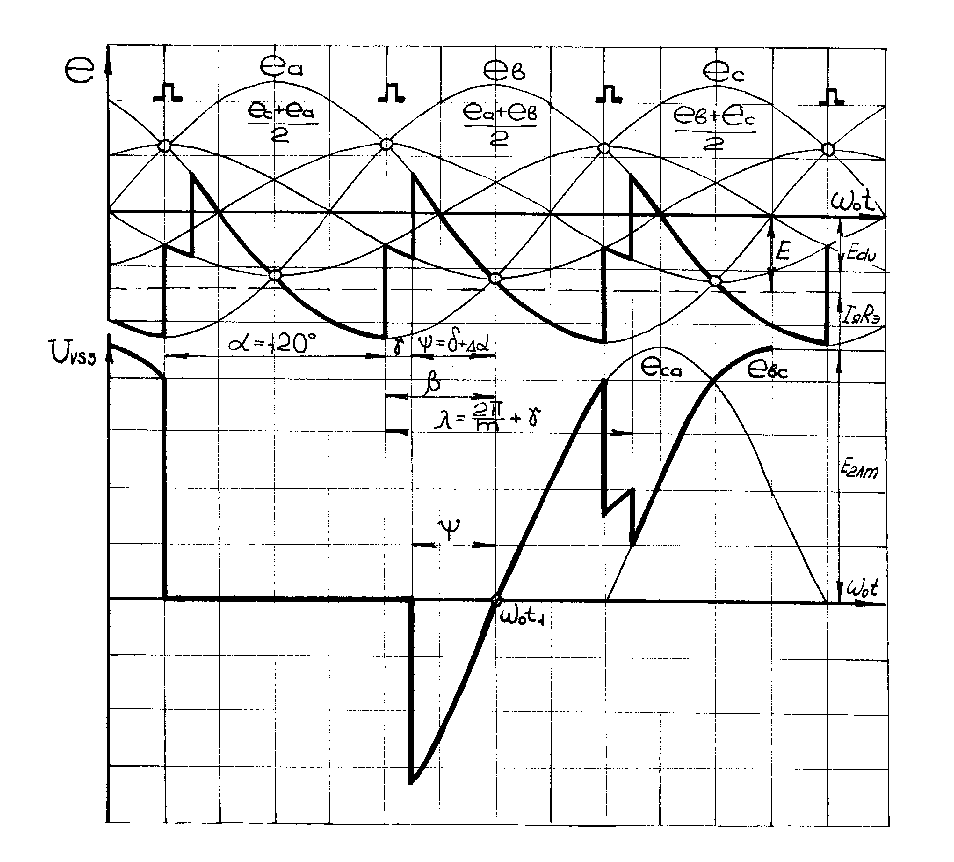
Рис. 2 Временные диаграммы работы преобразователя
в инверторном режиме
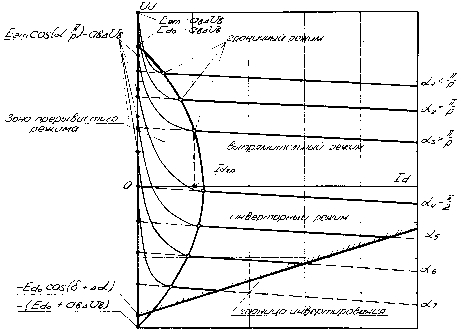
Рис. 3 Внешние характеристики
тиристорного преобразователя
![]()
Билет 22
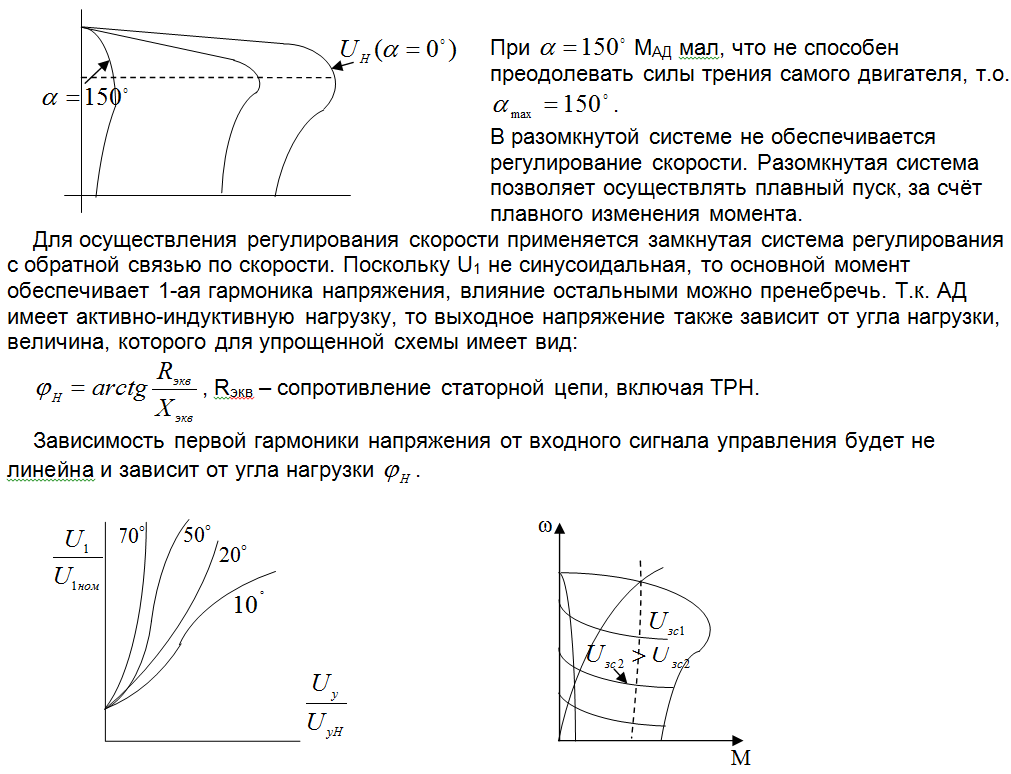
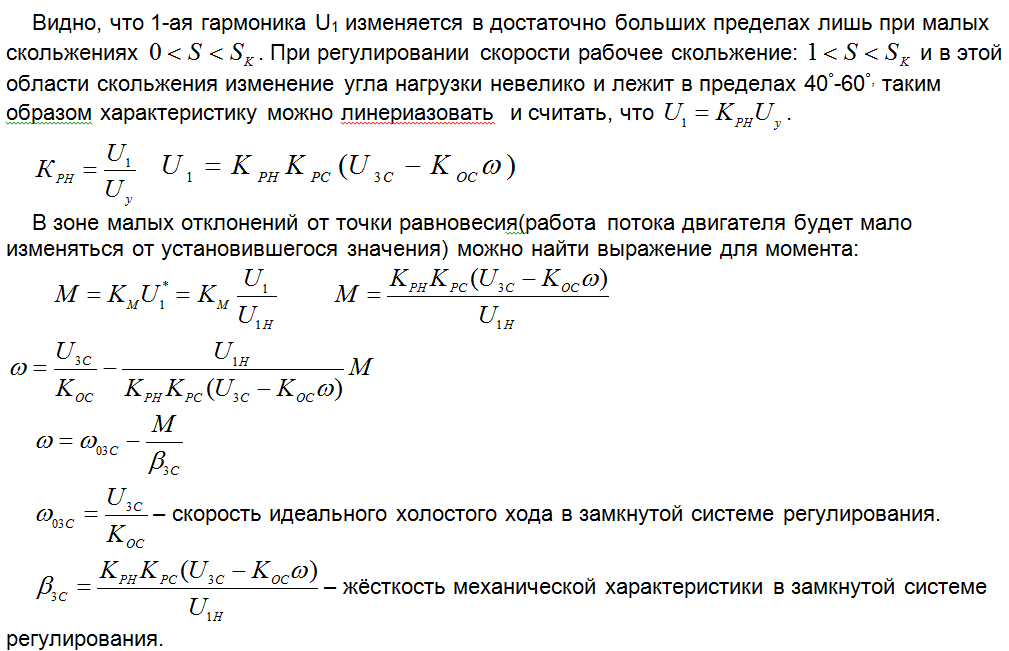
43. Система ТРН-АД. Показатели регулирования
Билет 23
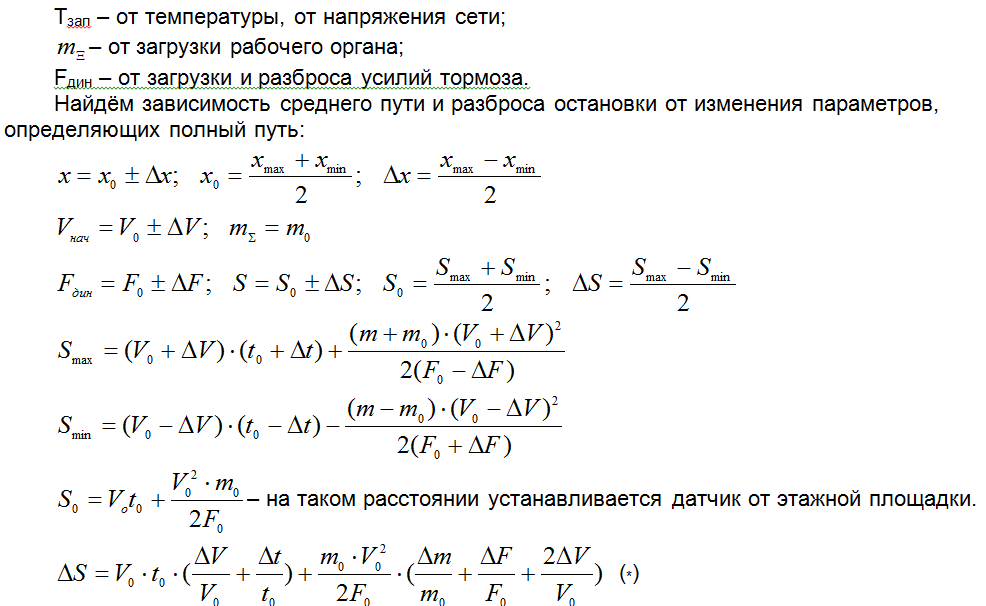
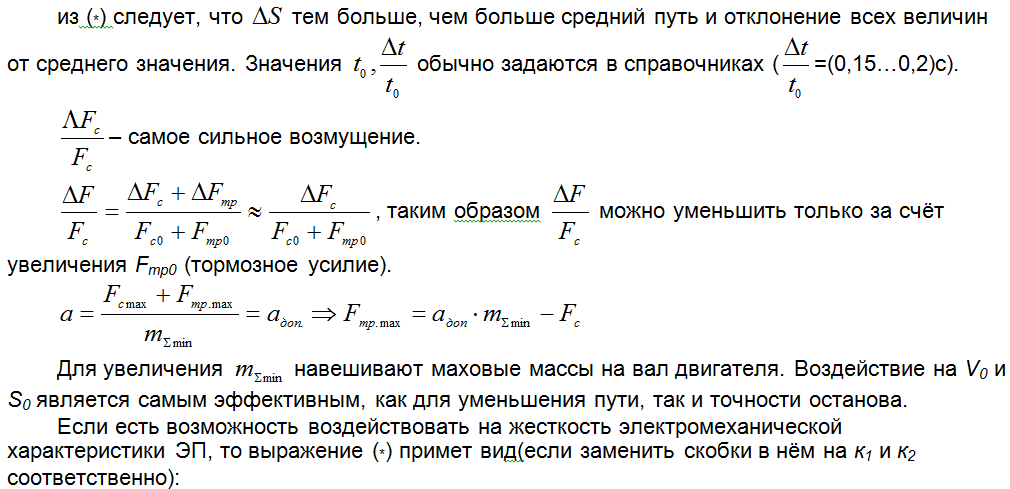
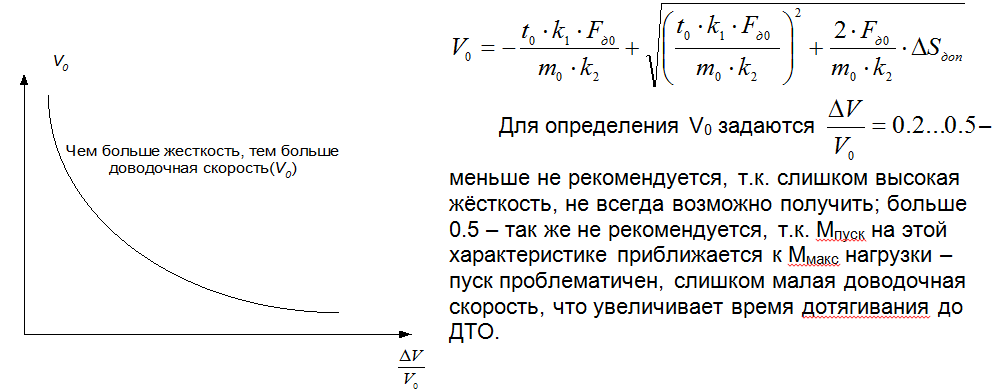
45. Автоматизация подъёмно-транспорных механизмов циклического действия. Точный останов


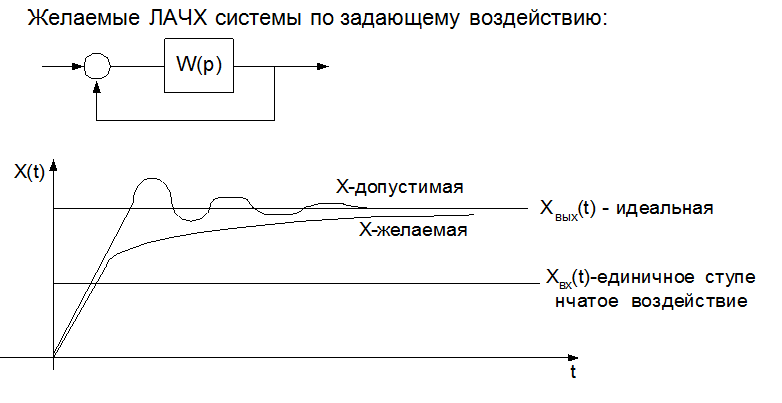
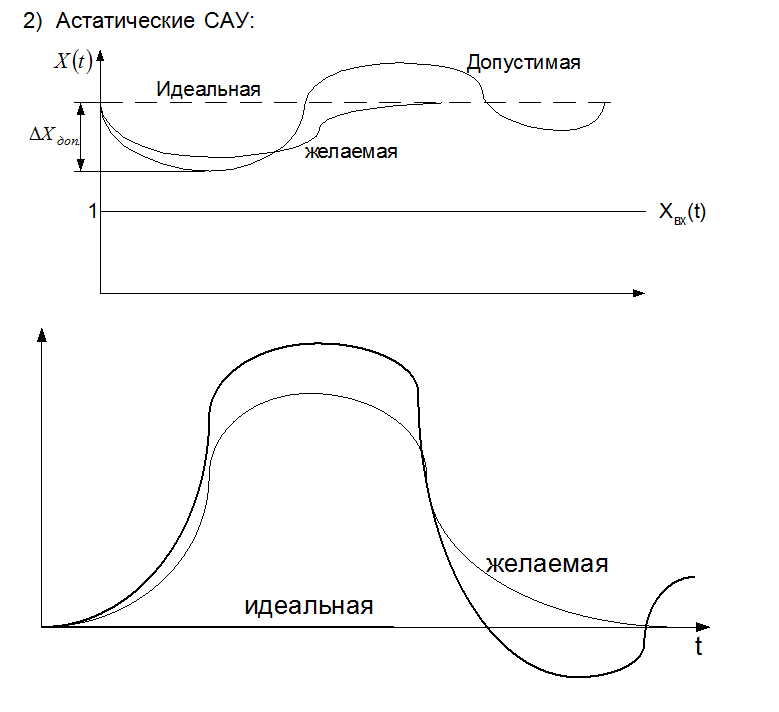
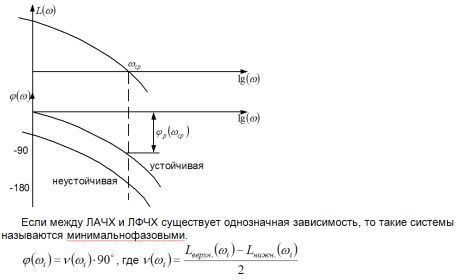
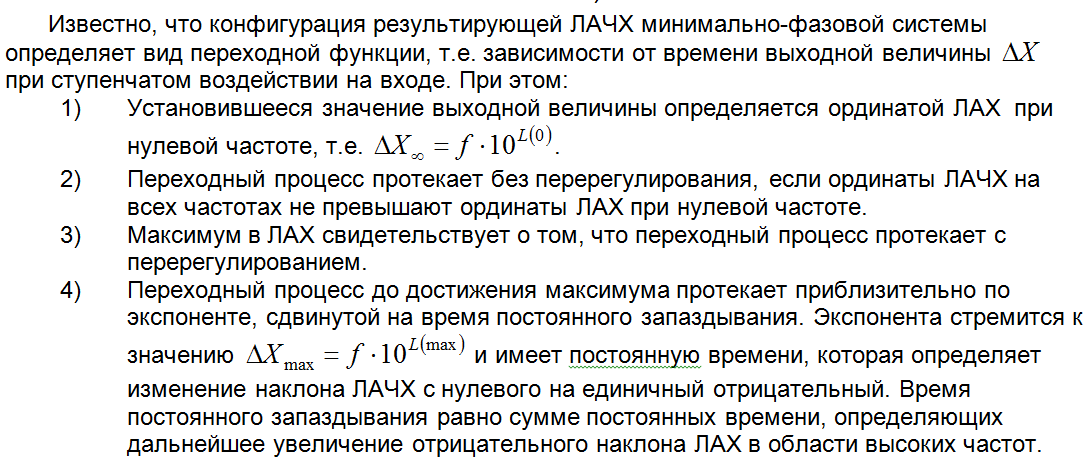
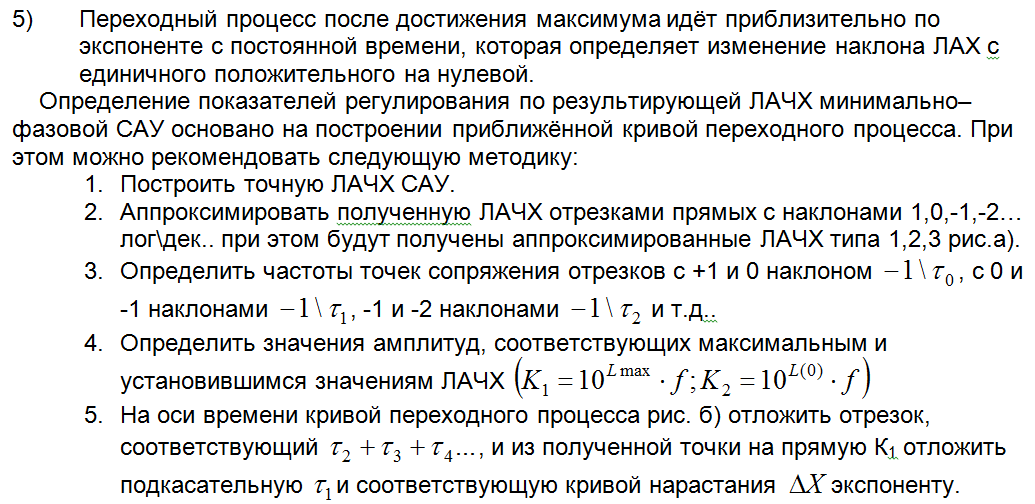
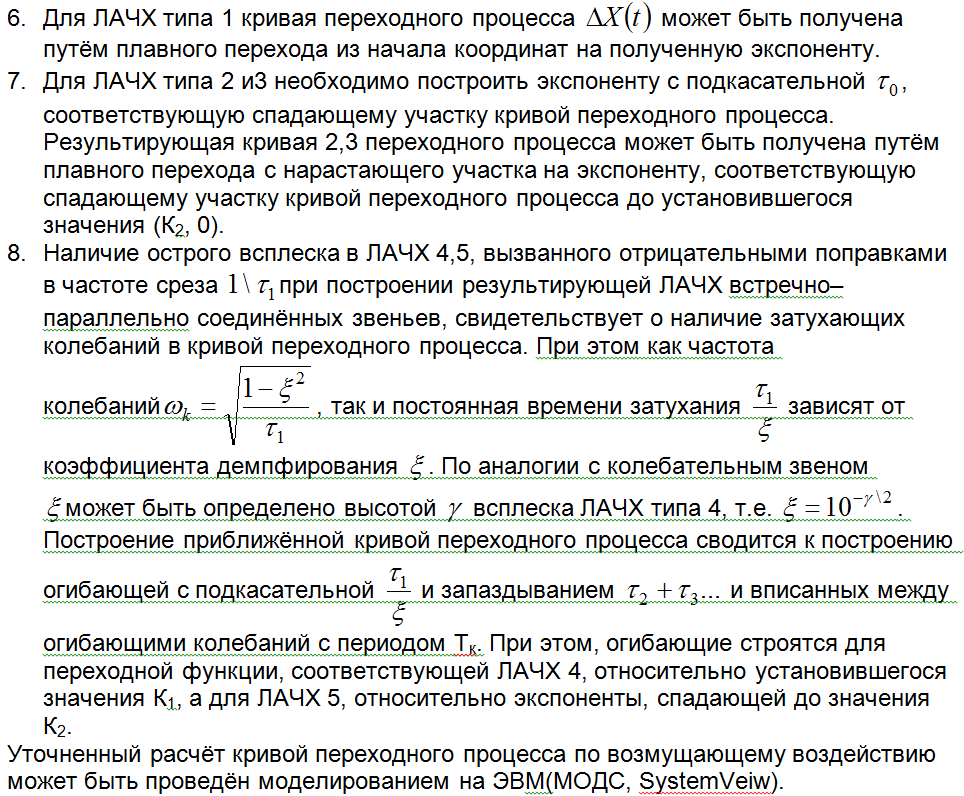
46 Типовые желаемые ЛАЧХ


Билет 24
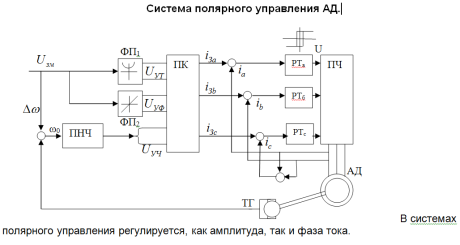
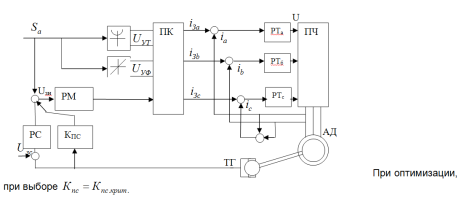
47. Система полярного управления АД. Достоинства и недостатки
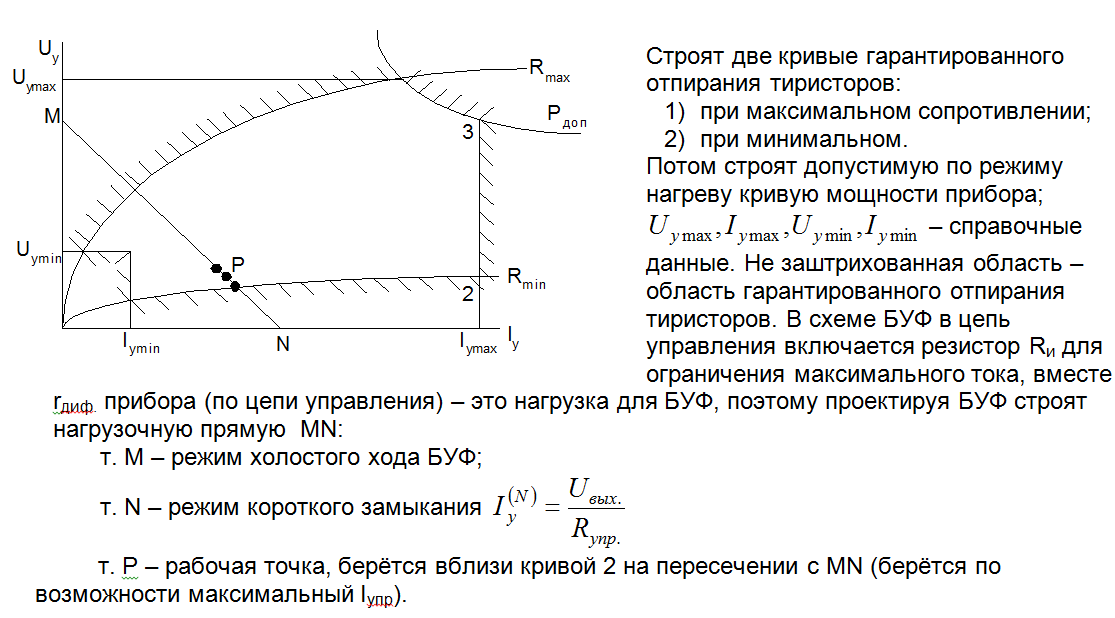
48. Привести диаграмму управления тиристором Uy=f(Iy). Пояснить принцип её построения и выбора рабочей точки на нагрузочной прямой для обеспечения надёжного отпирания тиристорного ключа
![]()
Билет 25
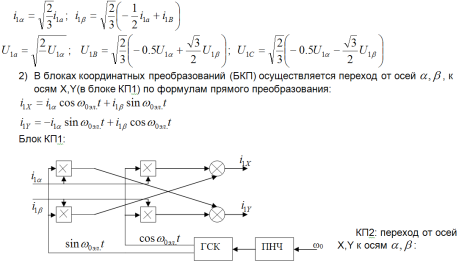
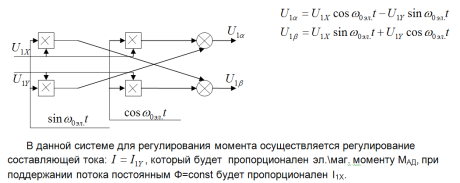
49. Система векторного управления АД. Достоинства и недостатки
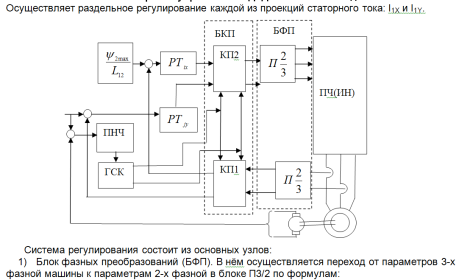

![]()
Билет 26
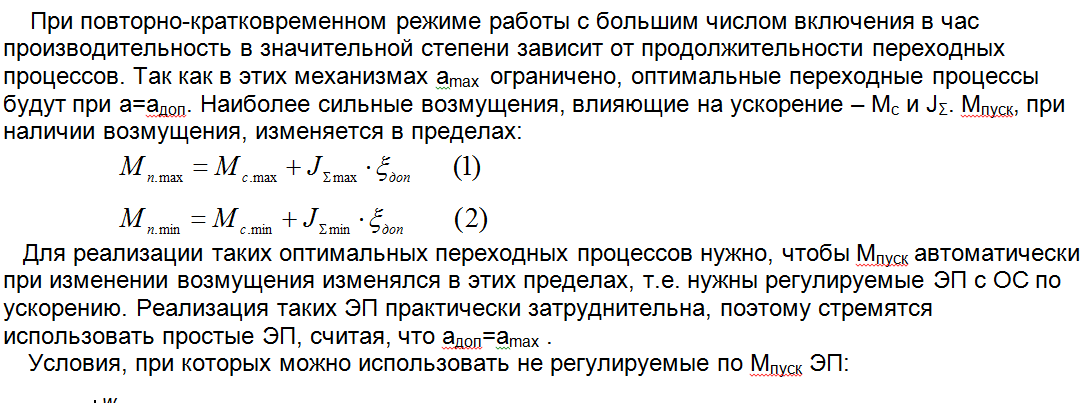
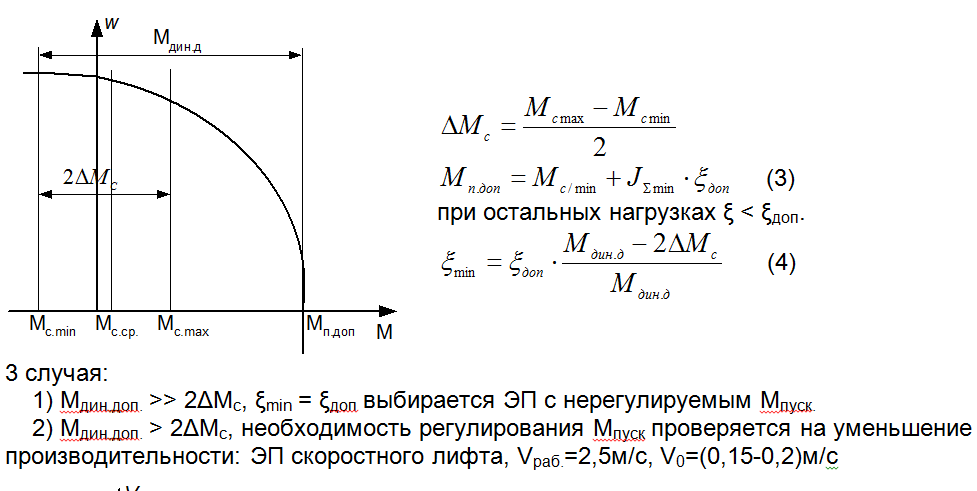
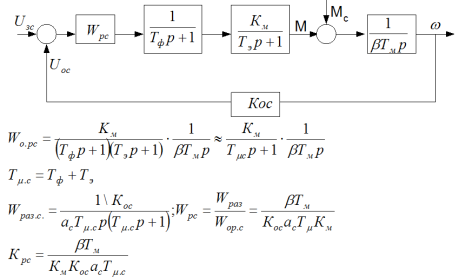
51. Динамика автоматизированных электроприводов ПТМ. Определение необходимости регулирования пускового момент
![]()
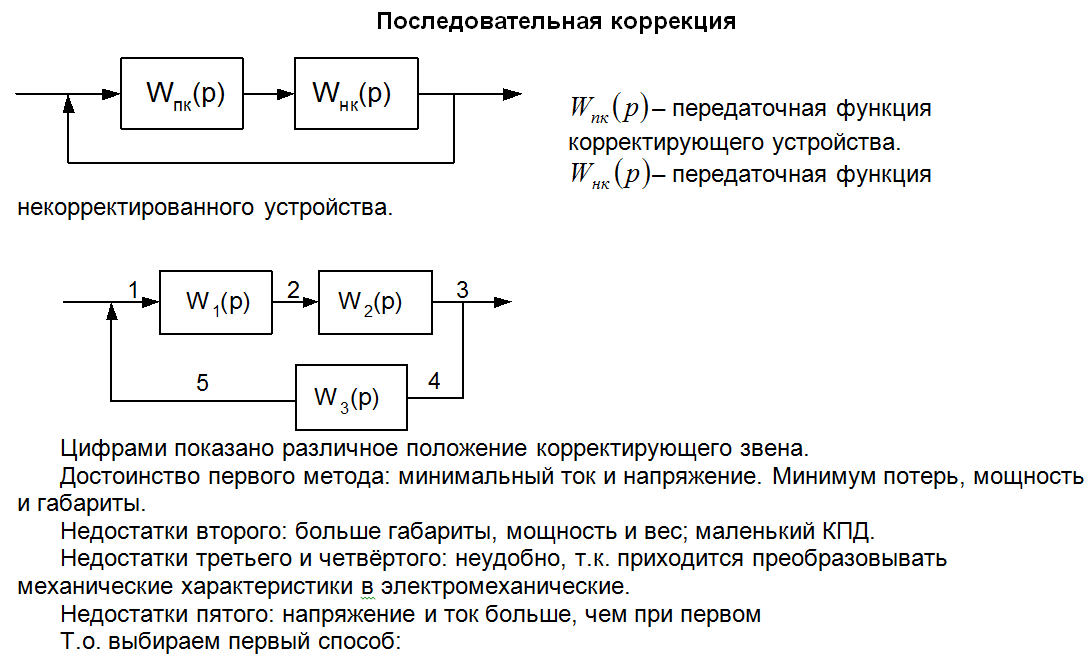
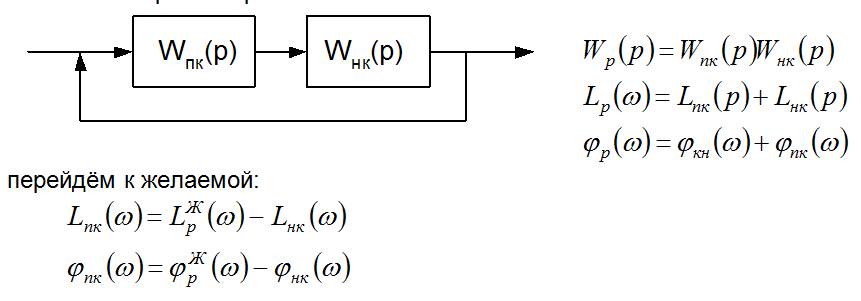
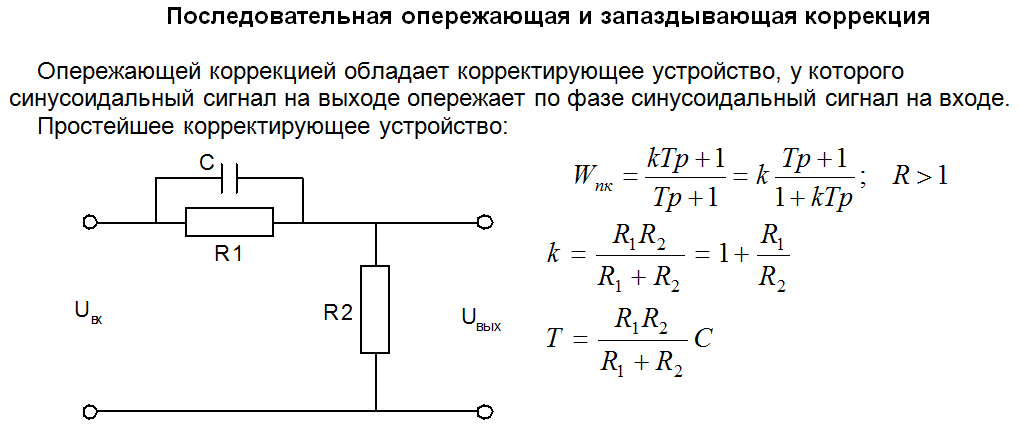
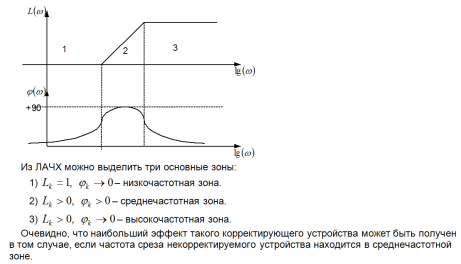
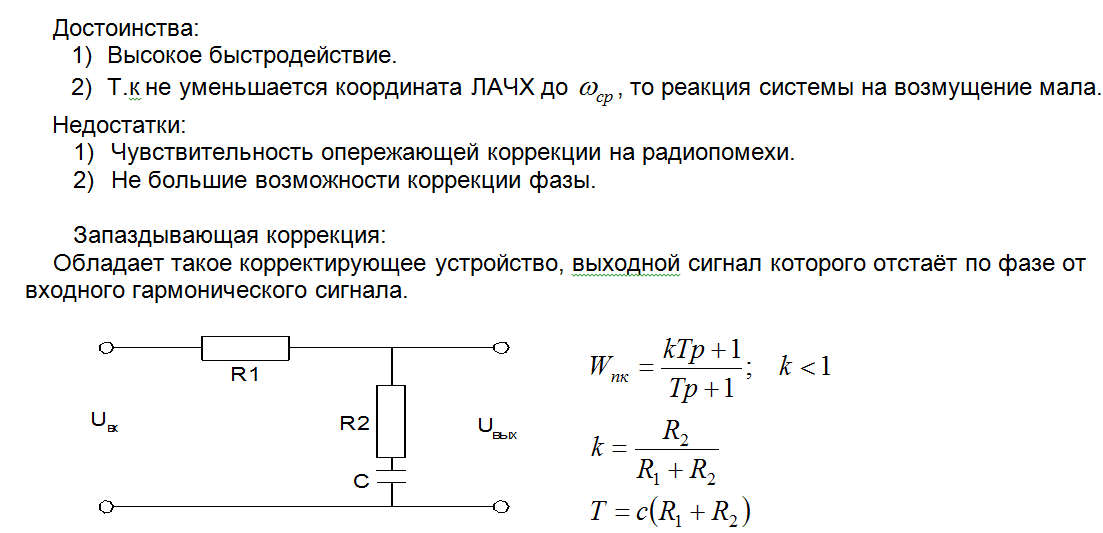
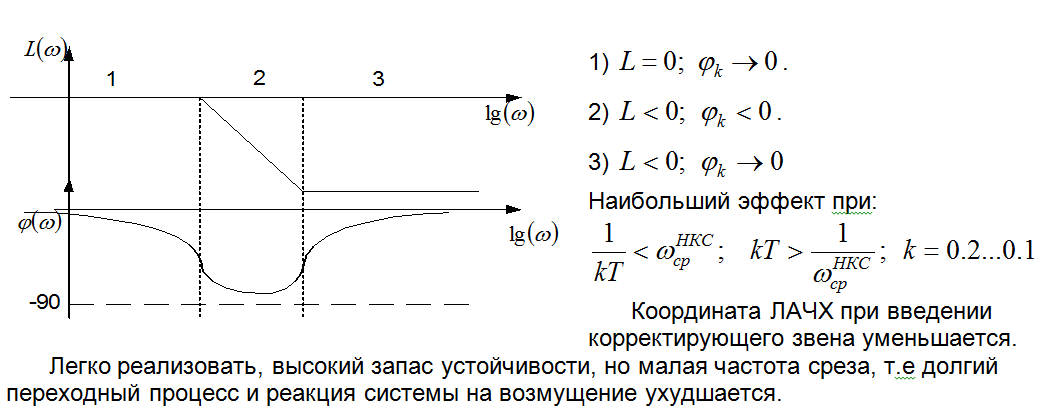
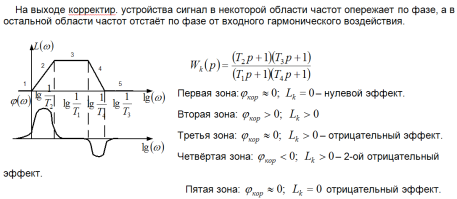
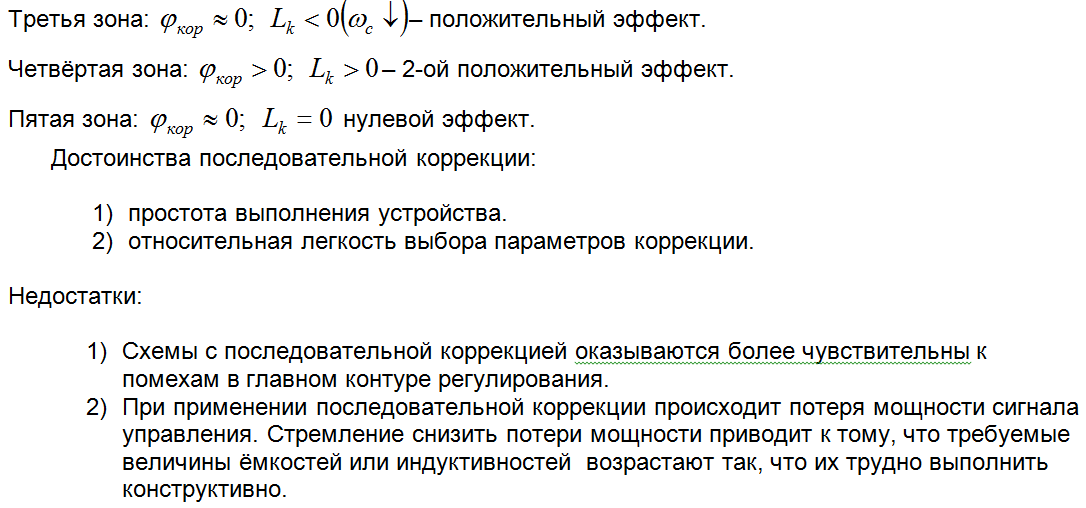
52. Последовательная опережающая и запаздывающая коррекция
![]()
Достоинство
ОК – введение корректирующего устройств
не уменьшает координат ЛАЧХ до
 .
.

Билет 27
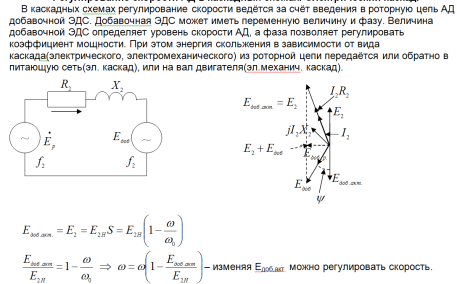
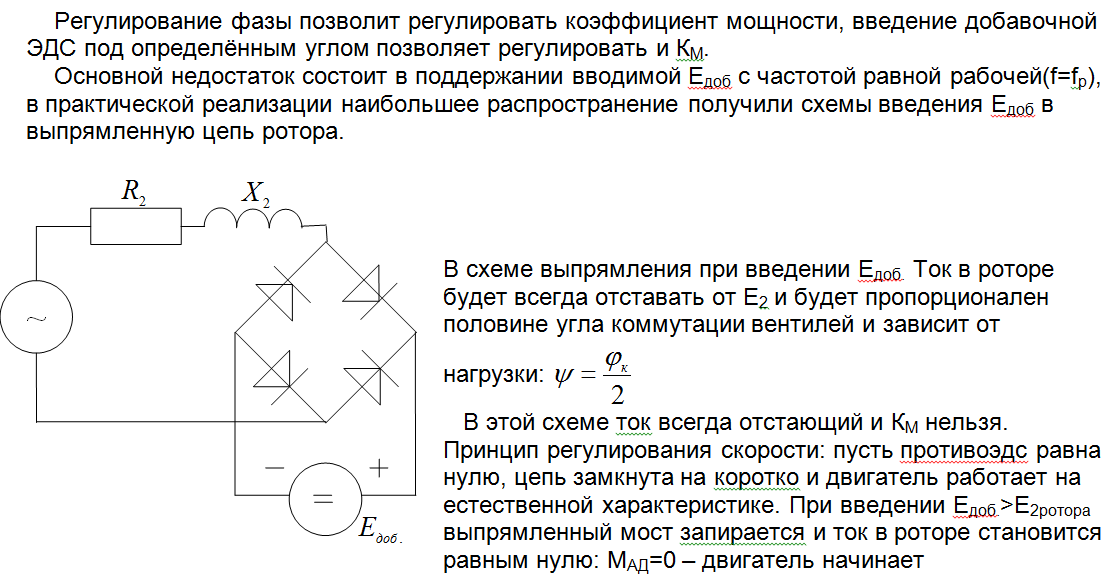
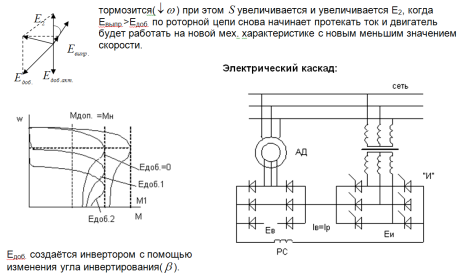
53. Регулирование скорости АД в каскадных схемах. Электрический каскад
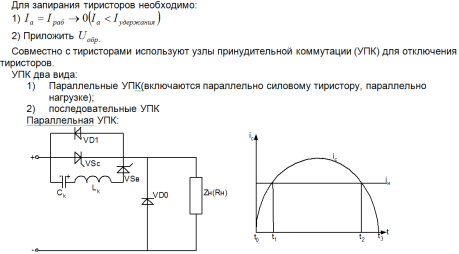
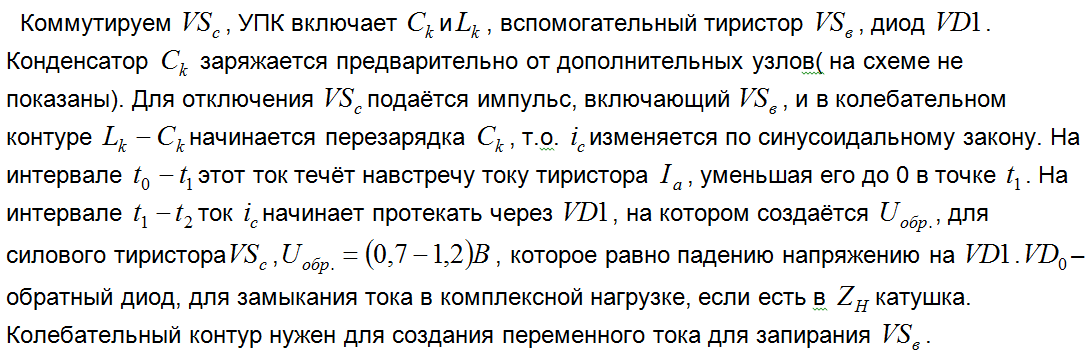
54. Изобразить одну из схем узла принудительной коммутации тиристора в цепи постоянного тока. Кратко пояснить принцип её работы
Билет 28
55. Взаимосвязанное частотное регулирование скорости АД
![]()
56. Комбинированная последовательная коррекция

Билет 29
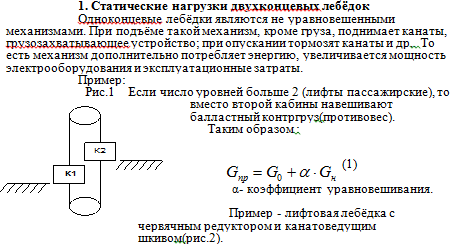
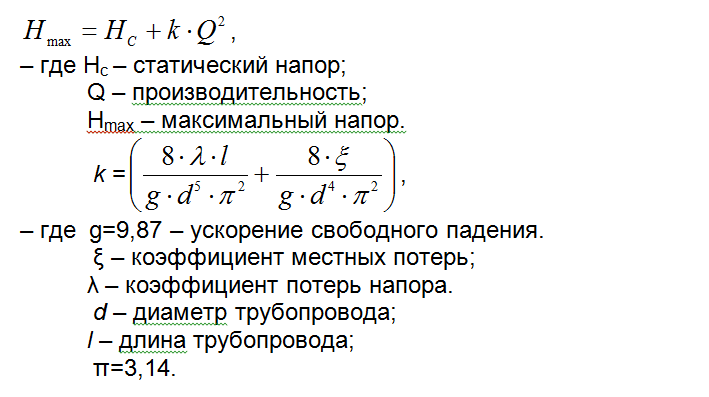
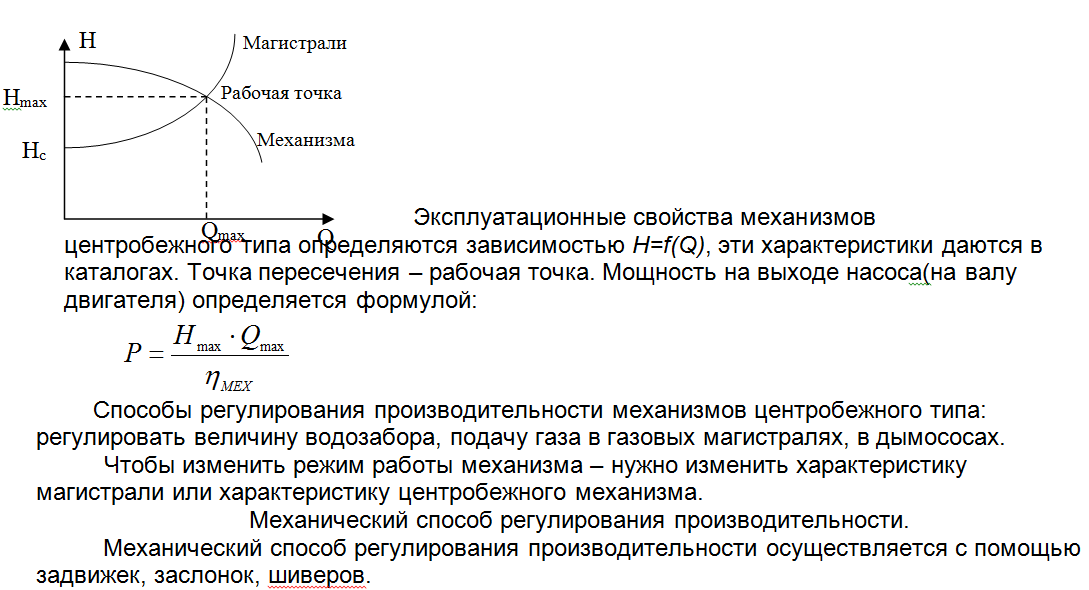
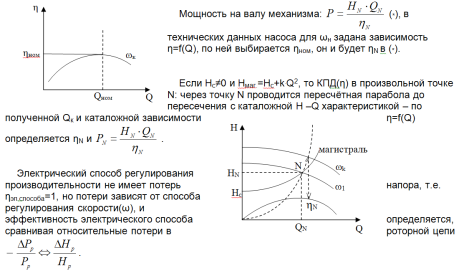
57. Статические нагрузки механизмов центробежного типа. Механический способ регулирования производительности

![]()
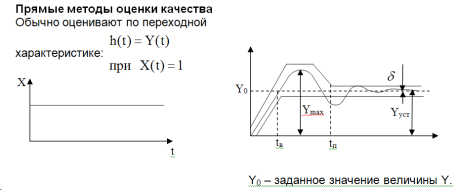
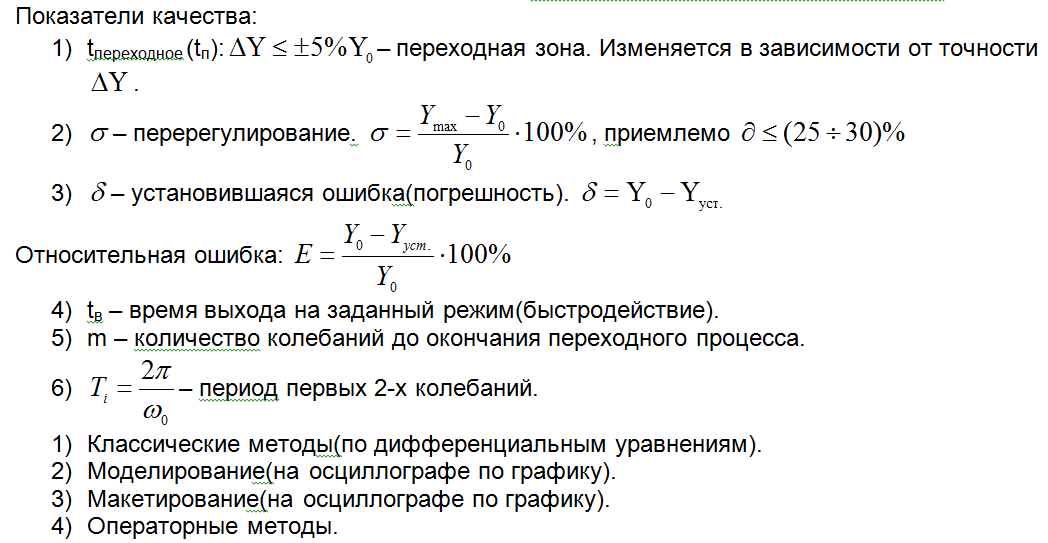
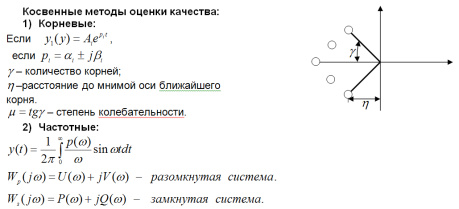
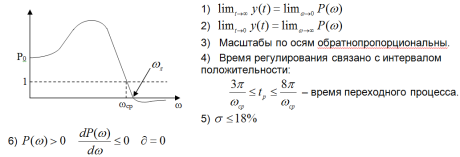
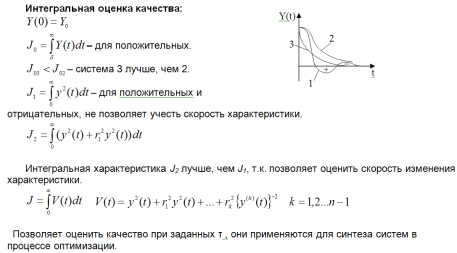
58. Оценка качества регулирования

Билет 30
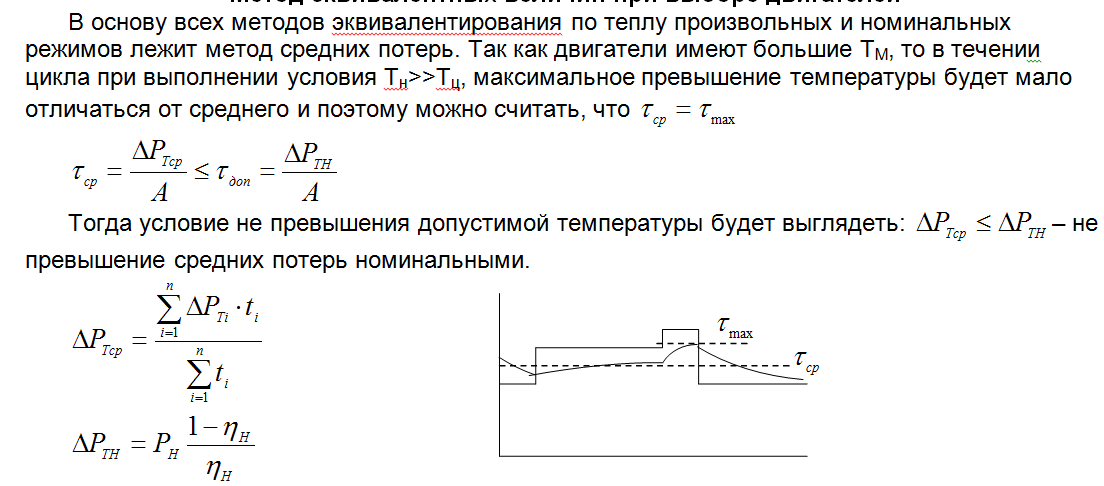
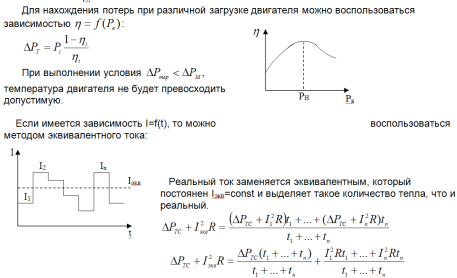
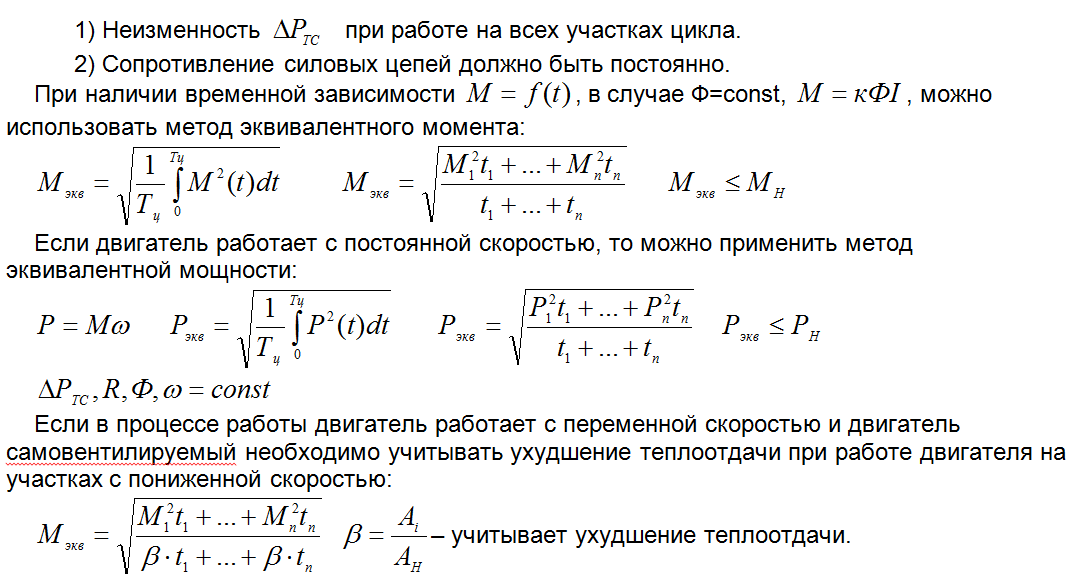
59. Метод эквивалентных величин при выборе двигателей
![]()
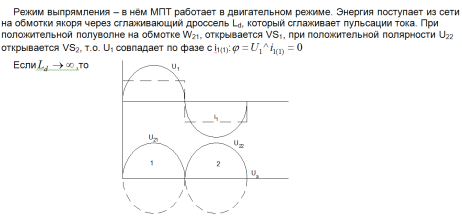
60. Определить условия перехода от режима выпрямления к режиму инвертирования. Что является показателем потребления энергии сетью?
![]()
Билет 31
61. Электрический способ регулирования производительности механизмов центробежного типа

62. Построение переходных характеристик


Билет 32
63. Влияние U1,X1,R1,X2,f на вид механических характеристик АД

64. Какие функции выполняет конденсатор в цепи нагрузки в автономном параллельном инверторе тока? Каков должен быть фазовый сдвиг между вектором первой гармонической составляющей тока инвертора Iu(i) и вектором напряжения на нагрузкеUн?
![]()
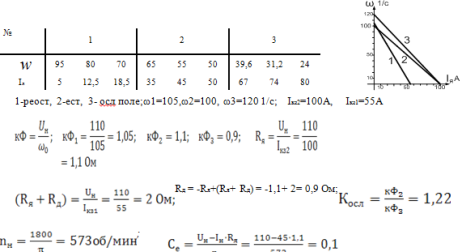
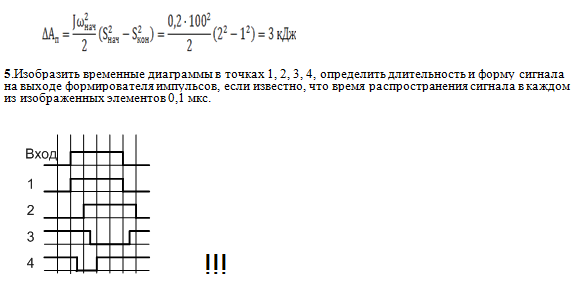
Задачи
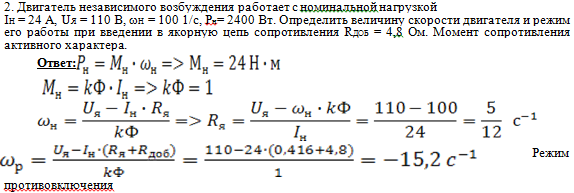
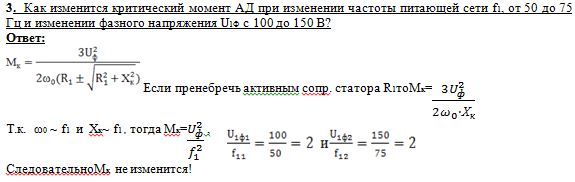
Билет №6
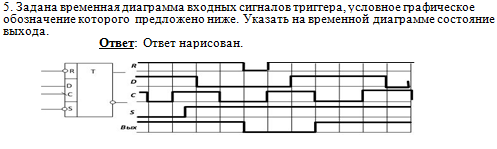
![]()
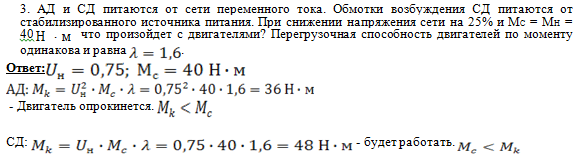
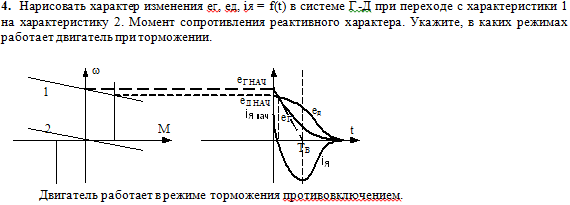
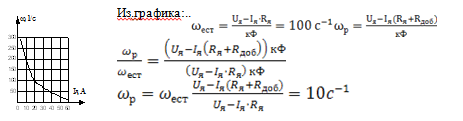
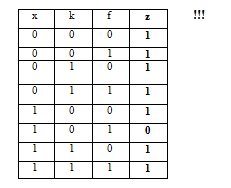
Билет 7
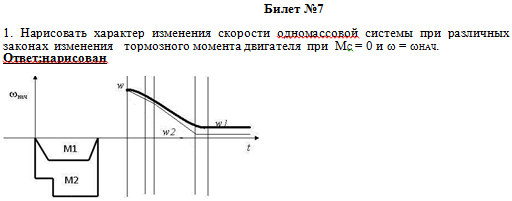
![]()
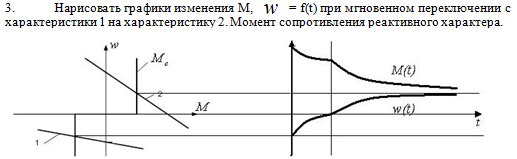
![]()
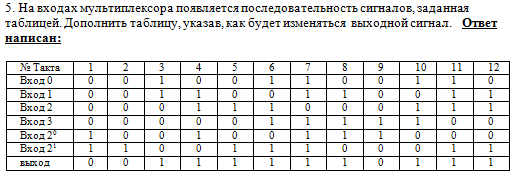
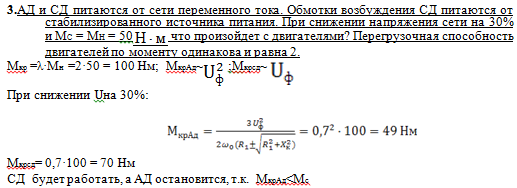
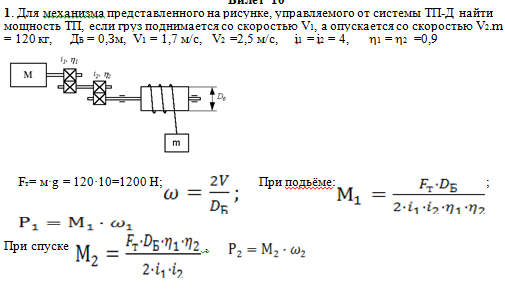
Билет 8

![]()
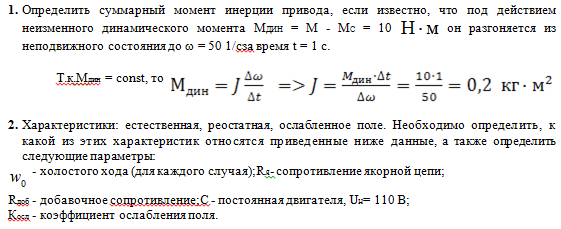
Билет 1
![]()

Билет 2
![]()
![]()
Билет 10
Билет 9

1