

3. Обзор приближенных методов поиска экстремума функции многих переменных
3.1. Все приближенные методы поиска экстремума ФМП базируются на следующем итерационном (пошаговом) алгоритме:
![]() , (3)
, (3)
по которому переход
от точки
![]() на к-ом шаге к точке
на к-ом шаге к точке![]() на (к+1)-ом шаге осуществляется в направлении
на (к+1)-ом шаге осуществляется в направлении![]() с параметром шага в этом направленииk.
Естественно, что направление
с параметром шага в этом направленииk.
Естественно, что направление![]() следует выбирать таким образом, чтобы
приближаться к экстремальной точке.
Выбор шагаkдостаточно произволен, но влияет на
скорость приближения к экстремуму.
Естественно, алгоритм (3) должен быть
сходящимся, т.е. гарантировать попадание
в экстремум за конечное или бесконечное
число итераций. Такая сходимость получила
название алгоритмической.
следует выбирать таким образом, чтобы
приближаться к экстремальной точке.
Выбор шагаkдостаточно произволен, но влияет на
скорость приближения к экстремуму.
Естественно, алгоритм (3) должен быть
сходящимся, т.е. гарантировать попадание
в экстремум за конечное или бесконечное
число итераций. Такая сходимость получила
название алгоритмической.
На рисунке 3 показана геометрическая интерпретация алгоритма (3).
3
Рис. 3
![]() к экстремальной точке выбирается по
градиенту или антиградиенту, а шагkвыбирается различными способами в
зависимости от метода.
к экстремальной точке выбирается по
градиенту или антиградиенту, а шагkвыбирается различными способами в
зависимости от метода.
Если функция многих
переменных
![]() дифференцируема, то частные производные
первого порядка показывают направление
наибольшего возрастания функции
дифференцируема, то частные производные
первого порядка показывают направление
наибольшего возрастания функции![]() в точке
в точке![]() .
Этот вектор называется градиентом
.
Этот вектор называется градиентом![]() в точке
в точке![]() и представляет собой вектор-столбец,
составленный из частных производных:
и представляет собой вектор-столбец,
составленный из частных производных:

Каждая частная производная определяет проекцию градиента на соответствующую ось. Если взять значение градиента с обратным знаком, то он покажет направление наибольшего убывания функции (антиградиент).
3.3. Метод наискорейшего спуска.
В методе наискорейшего
спуска параметр шага выбирается из
условия экстремума функции
![]() по градиенту.
по градиенту.
Пусть задана
сепарабельная (частный случай квадратичной)
функция
![]() и начальная точка х0=(–0,6;–2,6),
у0=4,68. Матрица Гессе для этой
функции:
и начальная точка х0=(–0,6;–2,6),
у0=4,68. Матрица Гессе для этой
функции:![]() .
Матрица положительно определена,
следовательно, функция выпуклая и имеет
единственный минимум. Вычислим в точке
х0проекции градиента:
.
Матрица положительно определена,
следовательно, функция выпуклая и имеет
единственный минимум. Вычислим в точке
х0проекции градиента:
![]()
![]()
На графике линий
равного уровня (рис. 4) строятся проекции
градиента в определенном масштабе и
результирующий вектор L1,
который дает направление наибольшего
изменения функции в точке х0. Если
провести черезL1плоскость, перпендикулярную {x1,x2}, то эта плоскость,
рассекая поверхность![]() ,
выделит на ней параболу. Далее находится
точка экстремума полученной параболы.
Для этого следует записать уравнение
параболы в данной плоскости (плоскости
градиента) с помощью параметра,
учитывающего направление антиградиента:
,
выделит на ней параболу. Далее находится
точка экстремума полученной параболы.
Для этого следует записать уравнение
параболы в данной плоскости (плоскости
градиента) с помощью параметра,
учитывающего направление антиградиента:
![]()
Подставляя значения координат и проекций градиента, получим:
![]()
Определим параметр
исходя из экстремума
функции![]() :
:
![]() ,
,
![]()
Теперь определим
координаты точки х(1), в которой
функция![]() по направлениюL1достигает экстремума.
по направлениюL1достигает экстремума.
![]() ,
,
![]() ,
,
З
Рис. 4

Продолжая вычисления,
а именно: 1) определяя проекции градиента,
2) составляя уравнения параболы
![]() в плоскости градиента, 3) находя параметриз условия экстремума
функции
в плоскости градиента, 3) находя параметриз условия экстремума
функции![]() ,
4) определяя координаты точки х(2),
в которой функция
,
4) определяя координаты точки х(2),
в которой функция![]() по направлению градиента достигает
экстремум, получим следующие результаты:
по направлению градиента достигает
экстремум, получим следующие результаты:
|
Таблица 1 | ||||||
|
Итерация |
0 |
1 |
2 |
3 |
4 |
5 |
|
х |
(-0,6;2,6) |
(-0,08;1,82) |
(0,48;2,19) |
(0,65;1,94) |
(0,83;2,06) |
(0,89;1,98) |
|
у |
4,68 |
1,3 |
0,41 |
0,14 |
0,043 |
0,014 |
Пусть задана
точность по значениям функции у на
смежных шагах 0,05.
Тогда разность на 4 и 5 итерациях![]() ,
следовательно, на пятой итерации
вычисления можно закончить.
,
следовательно, на пятой итерации
вычисления можно закончить.
Метод наискорейшего спуска в изложенном выше пошаговом варианте достаточно универсален и применим для широкого класса функций, имеющих конечную производную в каждой точке, т.е. гладких. Но уравнение для иногда получается сложным и громоздким. Для квадратичных функций определениеможно упростить и сделать более удобным для расчетов:

Или:
 , (4)
, (4)
3.4. Градиентный метод с переменным шагом.
Самая трудная операция в методе наискорейшего спуска – нахождение экстремального параметра . Чтобы ее исключить, можно задавать параметрв виде некоторой сходящейся числовой последовательности, например, в виде ряда:
![]() ,
где n=1,2… – номер итерации,
К – коэффициент.
,
где n=1,2… – номер итерации,
К – коэффициент.
Скорость сходимости данной модификации данной модификации в целом ниже, чем в методе с определением по экстремуму функции у(), и зависит от выбора коэффициента К и самой последовательности. Последовательность должна выбираться такой, чтобы скорость ее сходимости была ниже скорости сходимости градиента, иначе ряд сойдется к 0 быстрее, чем градиент. Для определения коэффициента К желательно определить на первой итерации параметрпо экстремуму у() или по уравнению (4).
3.5. Градиентный метод с постоянным шагом.
Параметр
![]() может быть определен на первом шаге, а
на последующих итерациях оставаться
постоянным. Это еще больше упрощает
вычисления.
может быть определен на первом шаге, а
на последующих итерациях оставаться
постоянным. Это еще больше упрощает
вычисления.
3.6. Метод сопряженных направлений.
Пусть имеем два
направления, которые характеризуются
векторами
![]() и
и![]() .
Направления
.
Направления![]() и
и![]() называют сопряженными по отношению к
некоторой положительно определенной
матрице Н, если выполняется соотношение
называют сопряженными по отношению к
некоторой положительно определенной
матрице Н, если выполняется соотношение
![]()
 ,
(5)
,
(5)
Сопряженность
связана с ортогональностью. Если Н –
единичная матрица, то при
![]() имеем два взаимно перпендикулярных
вектора. Соотношение (5) можно трактовать
таким образом: матрица Н, примененная
к вектору
имеем два взаимно перпендикулярных
вектора. Соотношение (5) можно трактовать
таким образом: матрица Н, примененная
к вектору![]() ,
изменяет его длину и поворачивает на
некоторый угол так, что новый вектор
,
изменяет его длину и поворачивает на
некоторый угол так, что новый вектор![]() должен быть ортогонален вектору
должен быть ортогонален вектору![]() .
.
Пусть требуется
с помощью метода сопряженных направлений
найти экстремум функции
![]() с начальной точкой
с начальной точкой![]() .
Решение задачи показано на рис. 5.
.
Решение задачи показано на рис. 5.
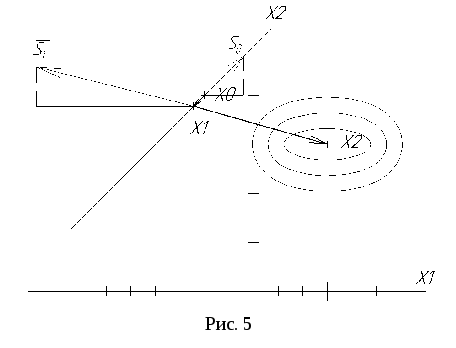
Через произвольно
взятый вектор
![]() с проекциями
с проекциями![]() =
=![]() =1,
отражающий направлениеL1,
проводится плоскость, перпендикулярная
плоскости {x1,x2}.
Плоскость пересечет экстремальную
поверхность у(х1, х2) и
выделит на ней экстремальную линию.
Определяются координаты минимума на
этой линии (параболе), для чего вычисляются
проекции градиента в точке х0:
=1,
отражающий направлениеL1,
проводится плоскость, перпендикулярная
плоскости {x1,x2}.
Плоскость пересечет экстремальную
поверхность у(х1, х2) и
выделит на ней экстремальную линию.
Определяются координаты минимума на
этой линии (параболе), для чего вычисляются
проекции градиента в точке х0:

и параметр
![]() по (4):
по (4):

Тогда:

Естественно, линия L1касается в точке х(1)линии равного уровня функции у.
Далее отыскивается
сопряженный вектор
![]() из условия сопряженности (5):
из условия сопряженности (5): .
.
Получается одно
уравнение с двумя неизвестными. Т.к.
важно знать направление вектора, то
одной неизвестной задаются произвольно.
Пусть
![]() =1,
тогда
=1,
тогда![]() =
–4. Сопряженный вектор должен проходить
через х(1).
=
–4. Сопряженный вектор должен проходить
через х(1).
Отыскивается
экстремум параболы в сечении поверхности
у(х1, х2) по направлению![]() .
.


Тогда

Итак, за две итерации
было найдено точное значение экстремума
функции у. В качестве первого вектора
![]() можно было выбрать градиент в исходной
точке, процедура поиска при этом остается
прежней.
можно было выбрать градиент в исходной
точке, процедура поиска при этом остается
прежней.
3.7. Метод проекций градиента.
Применяется для
решения классической задачи Лагранжа
на условный экстремум. Сущность метода
проекций градиента состоит в следующем.
Если взять в некоторой точке хккасательную плоскостьLк ограничению![]() ,
которая будет характеризоваться нормалью
к ней
,
которая будет характеризоваться нормалью
к ней![]() ,
и градиент функции
,
и градиент функции![]() в этой точке
в этой точке![]() ,
то проекция разности этих двух величин
,
то проекция разности этих двух величин![]() на касательную плоскость будет
характеризовать степень приближения
к экстремальной точке.
на касательную плоскость будет
характеризовать степень приближения
к экстремальной точке.
Ясно, что экстремальной
точкой
![]() будет такая, в которой проекция градиента
на касательную плоскость будет равна
0.
будет такая, в которой проекция градиента
на касательную плоскость будет равна
0.
Чтобы попасть в
![]() используется следующий алгоритм поиска:
используется следующий алгоритм поиска:
![]() ,
,
где М(к)– вектор, определяемый как разность градиента и нормали, взятой с весом:
![]()
Величина веса наk-ом шаге определяется из условия ортогональности нормали и проекции градиента:
![]()
Параметр шага
![]() ,
как и в методе наискорейшего спуска,
может быть определен из условия экстремума
параболы, полученной в сечении
экстремальной поверхности плоскостью,
проведенной в направлении М(k).
,
как и в методе наискорейшего спуска,
может быть определен из условия экстремума
параболы, полученной в сечении
экстремальной поверхности плоскостью,
проведенной в направлении М(k).

Данный метод требует, чтобы начальная точка находилась на ограничении.