

Производственная безопасность – Лекции 2.08.1
1. Опасные механические факторы
Источником механических травм могут быть: движущиеся механизмы и машины, незащищенные подвижные элементы производственного оборудования, передвигающиеся изделия, заготовки, разрушающиеся конструкции, острые кромки, заусенцы и шероховатости на поверхности заготовок, изделий, инструментов и оборудования, подъемно-транспортное оборудование, а также падение предметов с высоты. К перечисленным выше источникам можно добавить воздействия, связанные с коррозией металлов, являющейся причиной ослабления прочности конструкции и способствующей внезапному ее разрушению; действием сосудов, работающих под давлением, которые в случае разрушения воздействуют на окружающую среду и людей; падением на скользких поверхностях, действием нагрузок при подъеме тяжестей и т. д.
(Девясилов в.А. Охрана труда. Учебник. М.: Форум: инфра-м, 2003)
1.1. Механические движения. Действия технологического оборудования и инструмента
Наиболее типичным источником механических травм являются риски, заусенцы, выступы на движущихся (как правило, вращающихся) частях механизмов и инструментов. Чаще всего они расположены в следующих трех основных местах:
точка операции — точка, в которой на материале выполняют ся следующие виды работ: резка, формовка, штамповка, тис нение, сверление, формирование заготовок и т. д.;
приводы и устройства, передающие механическую энергию, — любые компоненты механической системы, передающие энергию выполняющим работу частям машины, — маховики, шкивы, ремни, шатуны, муфты, кулачки, шпиндели, цепи, кривошипы и шестерни и др.;
прочие движущиеся части — все части машины, которые двигаются, пока машина находится в работе. К ним относятся: возвратно- поступательные, вращающиеся и поперечно движущиеся части, а также механизмы подачи, вспомогательные части машины.
Широкое разнообразие видов механического движения и действий, которые могут представлять опасность для рабочих, включают в себя движение вращающихся деталей, возвратно-поступательных плечей, движущихся ремней, шестерней, режущих зубьев и любых частей, которые могут ударить, толкнуть или оказать другое динамическое воздействие. Различные типы механического движения и действий присущи почти всем машинам, и понимание этого — первый шаг к защите от опасности, которую они могут представлять.
Существует три основных типа движения: вращательное, возвратно-поступательное и поперечное.
Вращательное движение может быть опасным, т. к. даже гладкие медленно вращающиеся валы могут захватить одежду и вывернуть руку. Телесные повреждения, вызванные контактом с вращающимися частями, могут быть очень серьезными.
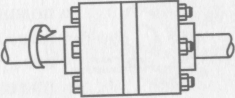
Втулки, муфты, кулачки, маховики, наконечники валов, шпиндели, горизонтальные или вертикальные валы являются примерами общепринятых вращающихся механизмов, которые могут представлять опасность. Существует дополнительная опасность, когда на вращающихся частях машин и механизмов (рис. 2.2) имеются прорези, заусенцы, выступающие болты, шпонки, установочные винты.
в)
Рис. 1. Примеры опасных выступов на вращающихся частях механизмов: a — вращающийся шкив со спицами и выступающими заусенцами на поверхности шкива; б — вращающийся вал и шкивы с выступающими ключом и установочным винтом; в — вращающаяся муфта с выступающими головками болтов.
Зоны захвата создаются вращающимися частями машины. Существуют три основных типа зон захвата:
1. Части с параллельными осями могут вращаться в разных на правлениях. Эти части могут соприкасаться (создавая таким образом точку захвата) или находиться вблизи друг от друга. В этом случае материал, который подается между валиками, создает точки захвата. Эта опасность является общей для машин и механизмов со сцепленными шестернями, вращающимися вальцами и каландрами, как показано на рис. 2.

Рис. 2. Наиболее распространенные зоны захвата вращающимися частями машин
2. Второй тип точки захвата создается между вращающимися и тангенциально (по касательной) двигающимися частями: точка со-
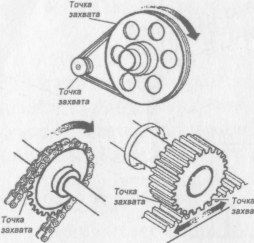
Рис. 3. Зоны захвата вращающимися элементами и частями с продольными движениями
![]()
Типичные места захвата (крышка удалена для ясности)
3. Точки захвата также могут возникать между вращающимися и неподвижными частями, вызывая режущее, дробящее и обдирающее действие. В качестве примера можно привести маховики со спицами, резьбовые конвейеры или окружность абразивного колеса с неправильно отрегулированной опорой (рис. 4).
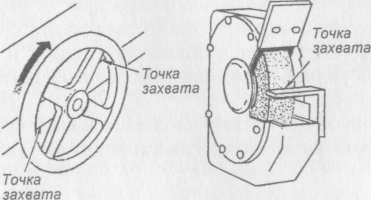
Рис. 4. Зоны захвата вращающимися частями машин
Возвратно-поступательное движение может быть опасным, поскольку во время движения вперед-назад или вверх-вниз рабочий может получить удар или попасть между движущейся частью и неподвижной частью. Пример получения такой механической травмы показан на рис. 3.
Поперечное движение (движение по прямой непрерывной линии) создает опасность, т. к. рабочий может получить удар или быть захвачен движущейся частью. Пример поперечного движения ремня привода показан на рис. 4.