

2 Образец выполнения расчета структурного, кинематического и динамического анализа механизма
2.1 Задание на расчет и исходные данные
Выполнить структурный, кинематический и динамический анализ плоского шарнирно-рычажного механизма (рисунок 2.1).
Исходные данные:
![]() ;
;
![]()
![]()
![]()
![]()
![]()
Удельная масса звеньев q = 40 кг/м. Учесть массы только тех звеньев, которые совершают плоскопараллельное движение.
Частота вращения
ведущего звена
![]() =
120 об/мин.
=
120 об/мин.
Сила сопротивления Fсопр= 190 Н прикладывается к ведомому звену (ползуну) противоположно его ходу.
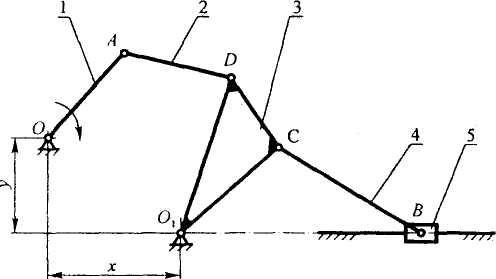
Рисунок 2.1 - Кинематическая схема механизма
2.2 Структурный анализ механизма
Степень подвижности механизма (рисунок 2.2) определим при помощи формулы Чебышева (структурной формулы плоских механизмов):
![]()
где n- число подвижных звеньев механизма, n = 5;
![]() - число
низших кинематических пар,
- число
низших кинематических пар,
![]() (О, O1.
A,
D,
С, В, Е);
(О, O1.
A,
D,
С, В, Е);
![]() -
число высших кинематических пар,
-
число высших кинематических пар,![]() .
.
Поэтому W=3∙5-2∙7=15-14=1. Механизм имеет одну степень подвижности.
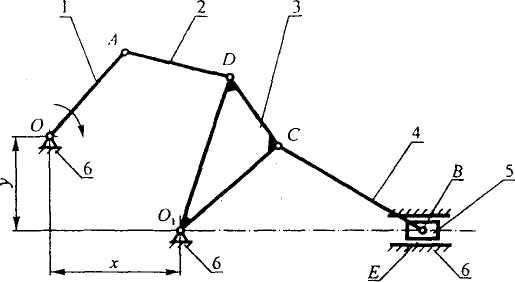
Рисунок 2.2 - Схема механизма с указанием подвижных звеньев и кинематических пар
Механизм образован последовательным присоединением к механизму I класса (ведущему звену со стойкой) группы Ассура II класса 1-го вида, а затем группы Ассура II класса 2-го вида. Последовательность образования механизма представлена на рисунках 2.3 - 2.5.
В

Рисунок
2.3 - Начальный
механизм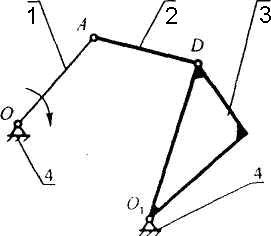
ГА 1 кл + ГА IIкл 1-го вида
Рисунок 2.4 - Образование шарнирного четырехзвенника
Шарнирный четырехзвенник ОАДО1 получен путем соединения начального механизма и группы Ассура из звеньев 2 и 3 кинематической парой А в кинематическою цепь. Степень его подвижности:
![]()
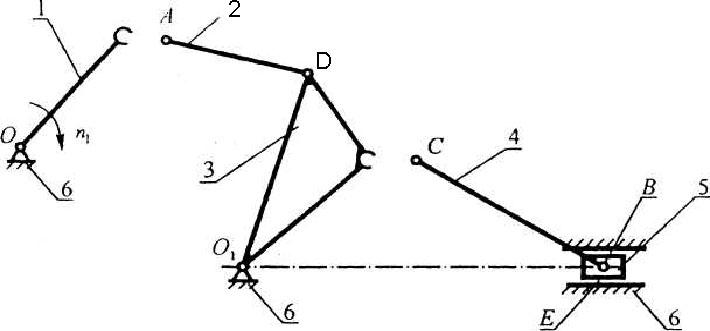
Рисунок 2.5 - Структурная схема шестизвенного механизма
Формула строения механизма: I(1) + II(1)+II (2).
Наивысший класс присоединенных групп - второй, поэтому механизм надо отнести ко II классу.
2.3 Построение плана положений механизма
Сначала вычерчивается 12 положений ведущего звена (рисунок 2.6). Длина отрезка ОА = 100 мм, изображающего на чертеже ведущее звено, принимается произвольно с целью получения оптимального масштаба плана положений. Масштаб должен быть таким, чтобы план положений занял от 1/5 до 1/4 площади чертежа. Например,
![]()
Определяем координаты шарниров и место положения направляющей, а также длины звеньев механизма на чертеже с учетом масштабного коэффициента:
![]()
![]()
![]()
![]()
![]()
Аналогично определяем остальные размеры: х = 20 мм, у = 25 мм.
В качестве нулевого принимаем такое положение ведущего звена, при котором точка А занимает крайнее левое положение. Проводим окружность радиуса OA, делим ее на 12 равных частей, отмечая соответствующие точки (А0, А1, А2, А3, …А12). Для каждого из 12 положений ведущего звена методом засечек определяем положения всех остальных звеньев механизма.
Все построения выполняем сплошными тонкими линиями, после чего исследуемое положение механизма выделяем сплошной основной линией.
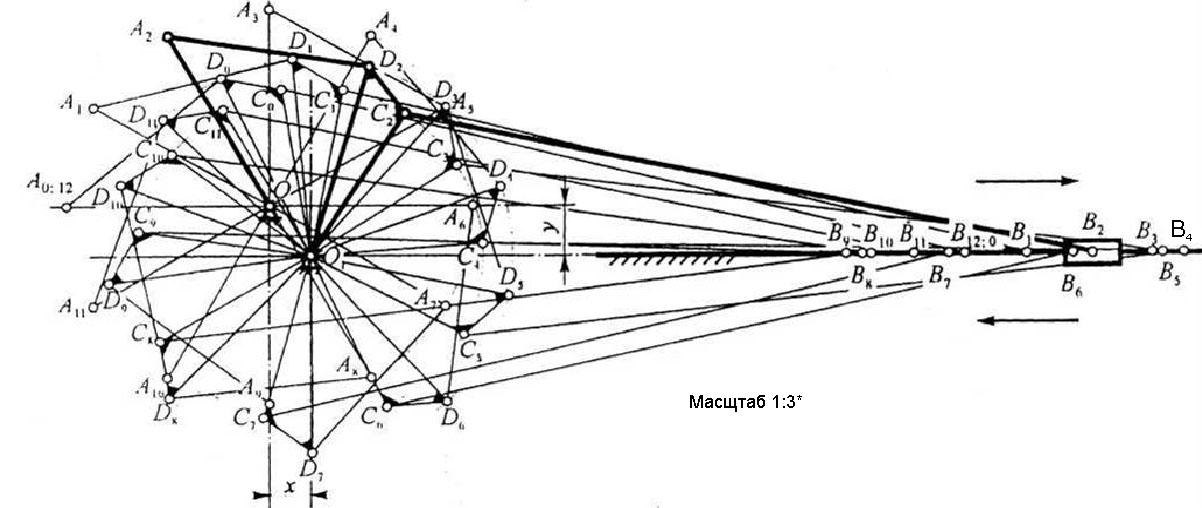
Рисунок 2.6 – План положений механизма за один рабочий цикл
* Здесь и на последующих рисунках, выполненных не в качестве общих схем, а на основании расчетов и точных построений, длины всех отрезков уменьшены в три раза по сравнению с рассчитанными, которые должны быть на чертежах графической части работы.