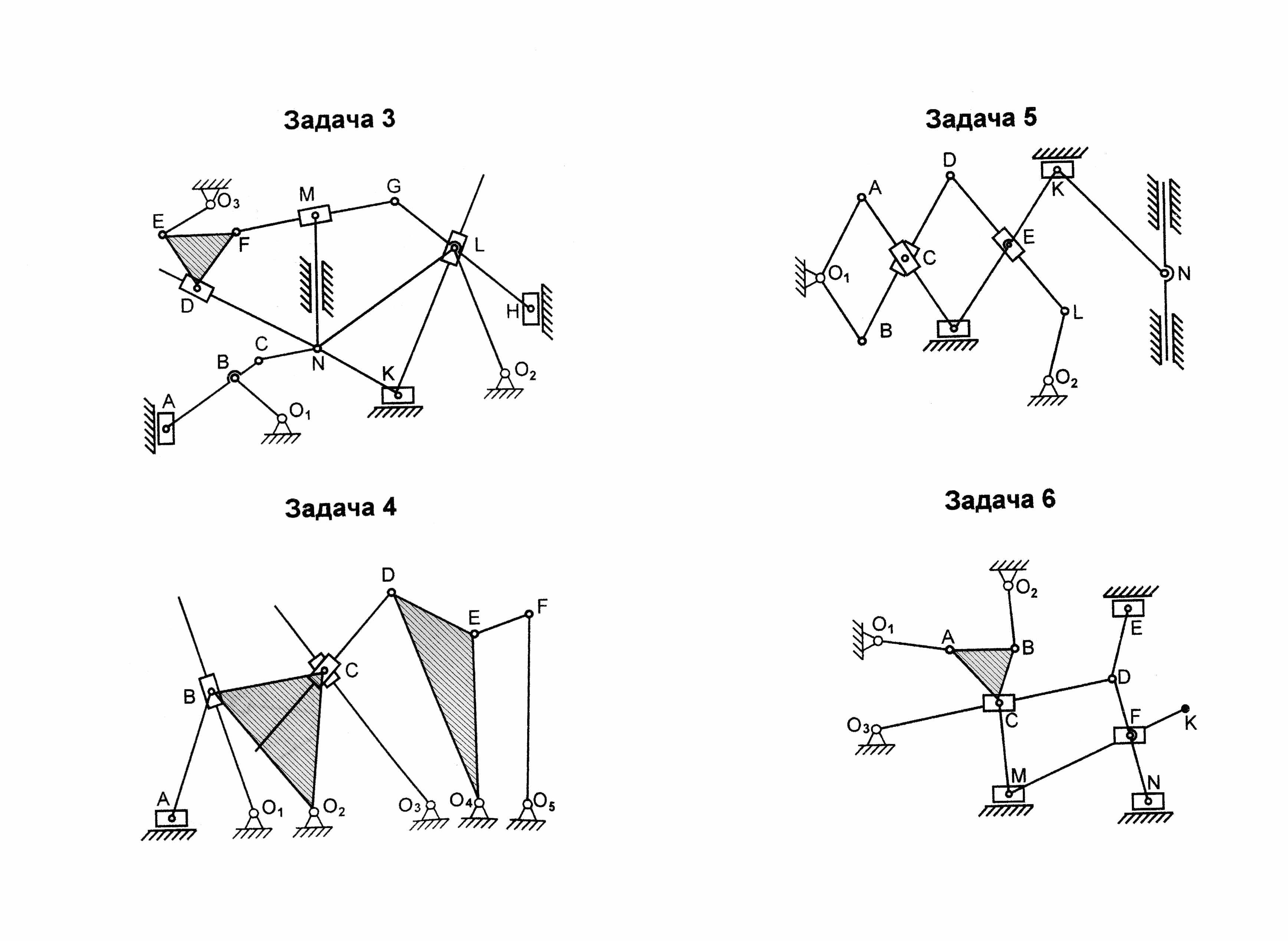
Задача 5
В этой задаче необходимо произвести силовой анализ и определить реакции в кинематических парах и уравновешивающую силу. При этом исследуется механизм, синтезированный в задаче 2 и в том положении, для которого был проведён кинематический анализ. Поэтому эту задачу рекомендуется решать после получения положительной рецензии на задачу 2.
Общие данные для
всех вариантов: центральный момент
инерции стержневых звеньев определять
по формуле:
![]()
массы стержневых
звеньев определять по формуле
![]()
где: погонная масса
равна
![]()
![]() длина
звена в метрах;
длина
звена в метрах;
![]() кулисного камня
=
кулисного камня
=![]() ползуна
ползуна![]() кривошипа;
кривошипа;
сила полезного
сопротивления равна
![]() ,
приложена к крайней точке выходного
звена и линия её действия параллельна
и противоположна вектору скорости точки
её приложения.
,
приложена к крайней точке выходного
звена и линия её действия параллельна
и противоположна вектору скорости точки
её приложения.
Уравновешивающую силу необходимо определять двумя методами: методом планов сил и методом жёсткого рычага Н.Е. Жуковского. Значения этой силы, полученные двумя методами, необходимо сравнить, причём, процент ошибки не должен превышать пяти.
4 Экзаменационные задачи
Структурный анализ
Решение задач на
эту тему заключается в определении
степени подвижности механизма и разбивке
механизма на группы Ассу. Рассмотрим
решение на приведённом примере. В этом
механизме подвижных звеньев 13, т.е.
![]() Далее при подсчёте количества
кинематических пар необходимо
руководствоваться следующим указанием:
в каждом узле количество кинематических
пар на единицу меньше количества
сходящихся в нём звеньев, при этом
следует учитывать, что стойки также
участвуют в образовании кинематических
пар. На основании этого руководства
получаем: в точках
Далее при подсчёте количества
кинематических пар необходимо
руководствоваться следующим указанием:
в каждом узле количество кинематических
пар на единицу меньше количества
сходящихся в нём звеньев, при этом
следует учитывать, что стойки также
участвуют в образовании кинематических
пар. На основании этого руководства
получаем: в точках![]() по одной к.п.; в точкахК
и D
– по две к.п.; в точках А
и Е
– по три. Итого
по одной к.п.; в точкахК
и D
– по две к.п.; в точках А
и Е
– по три. Итого
![]() ,
следовательно, степень подвижности
механизма будет равна:
,
следовательно, степень подвижности
механизма будет равна:
![]()
Зная, что входным звеном может быть только звено, образующее к.п. со стойкой, выбираем входным звеном, например, звено 11 и разбиваем механизм на группы Ассура как показано на (рисунке 4.1) . Завершаем решение задачи написанием структурной формулы, соответствующей механизму при данном входном звене.
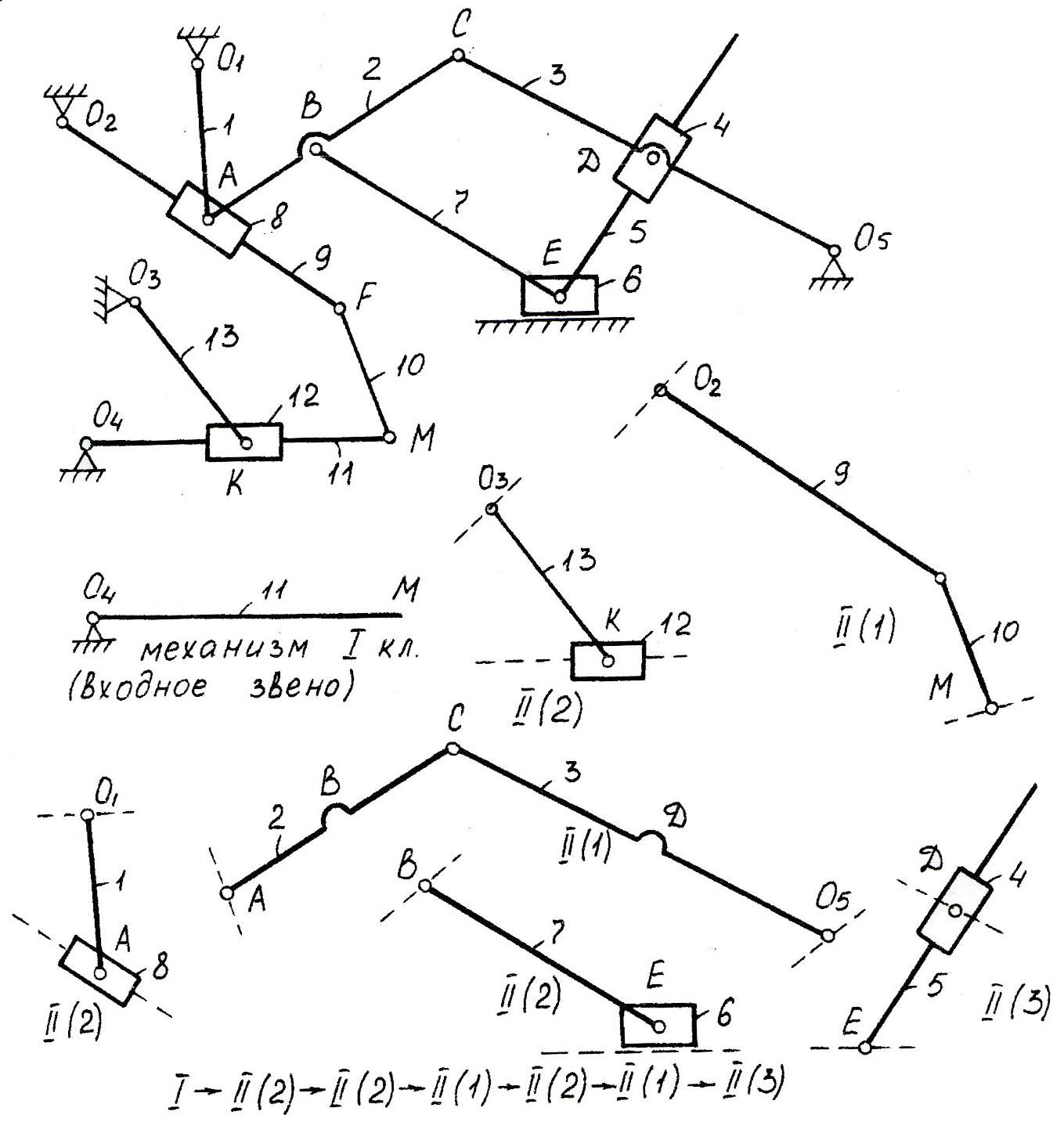
Рисунок 4.1 - Разбиение механизма на группы Ассура
Кинематический анализ рычажных механизмов
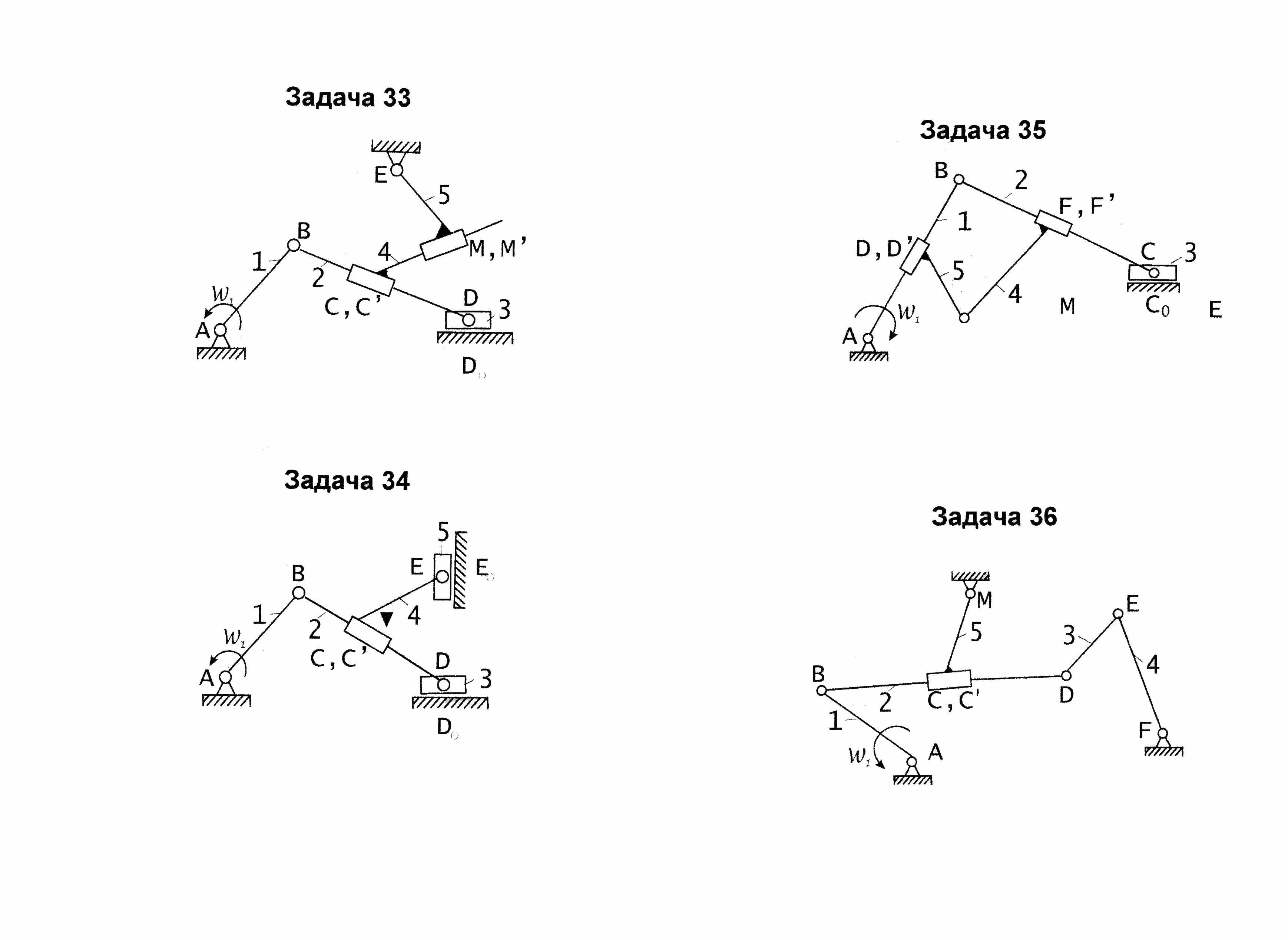
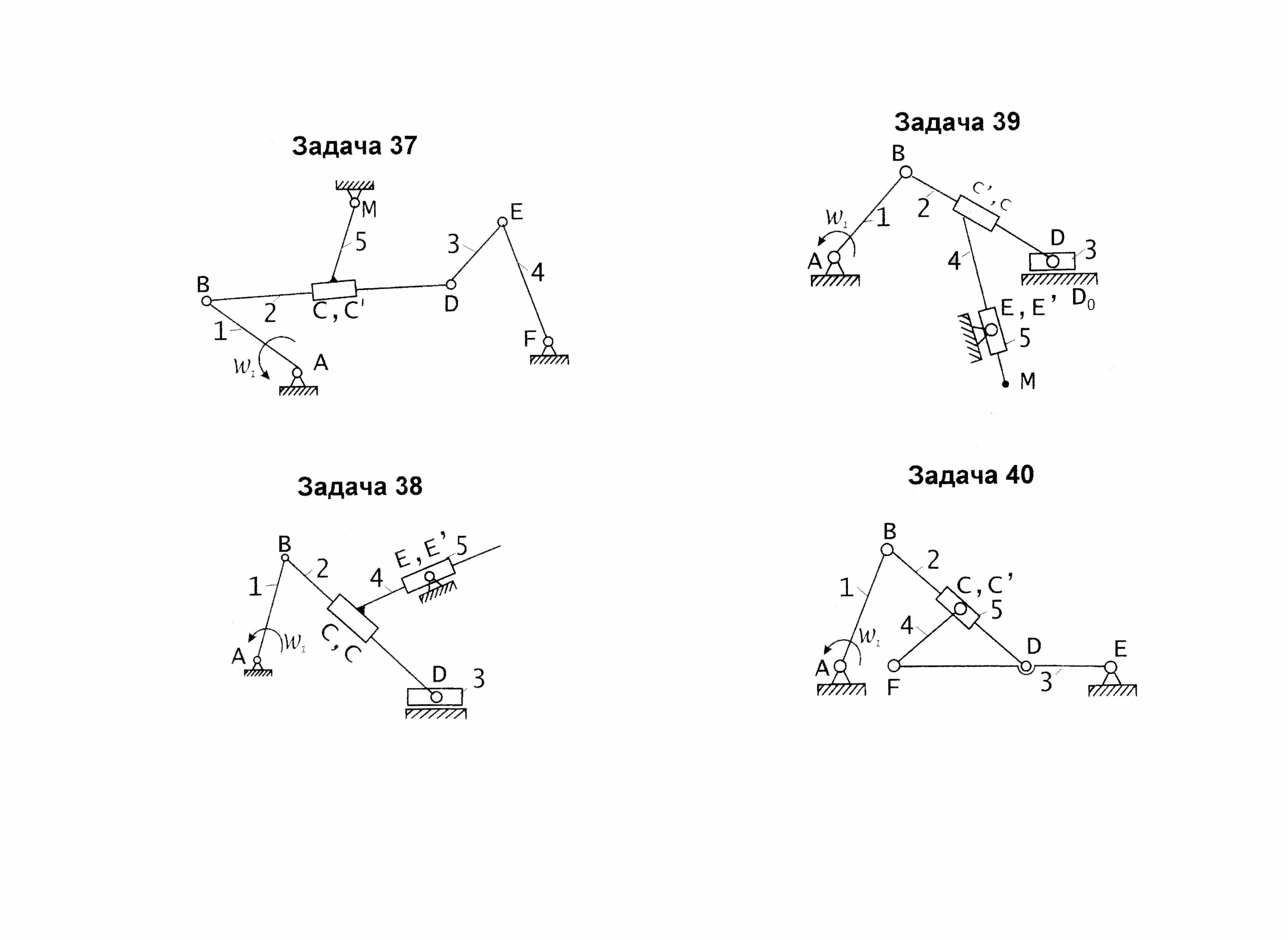
Кроме групп Ассура класса стандартного типа, имеются группы второго, третьего, четвёртого и пятого видов, у которых шарниры кулисного камня и ползуна имеют не центральное расположение. В этих случаях кинематика этих групп Асура требует применения специальных методов. Рассмотрим такой случай на примере механизма с группой второго класса, второго вида, звенья которой расположены на подвижных звеньях основного механизма. (рис. 4.2)
Параметры звеньев 2 и 3, к которым присоединены рассматриваемая группа, считаются известными: поэтому положения точек b, с и d на плане скоростей также известно. Точки m и k находим на векторах bc и cd по теореме о подобии. Затем через точку m проводим линию действия вектора VMM, которая будет параллельна звену 2, т.к. она характеризует вектор скорости поступательного движения кулисного камня M относительно точки M/ кулисы 2. Обозначим эту картину скоростей m-m. Точка E звена 5 вращается вокруг точки К. Поэтому, проведя через точку К прямую, перпендикулярную звену 5, получаем картину скоростей e-e.
Кроме того, точка Е, является точкой звена 4, при поступательном движении его по звену 2 имеет скорость поступательного движения относительно точки, принадлежащей звену 2 и находящейся под точкой Е. Присоединив плоскость S к звену 2, фиксируем на ней точку Е2, лежащую под точкой Е звена 4.
Для нахождения точки Е2 на плане скоростей проводим её картины скоростей е2-е2 через точку b перпендикулярно стороне ВЕ2 и через точку m перпендикулярно стороне М/Е2. Их пересечение даёт точку е2. Проводим через неё картину скоростей е-е параллельно звену 2, которая пересекаясь с одноимённой картиной скоростей даёт точку е.
Второй способ
Этот способ основан
на равенстве угловых параметров звеньев,
связанных поступательной кинематической
парой.
В данном примере
очевидно, что W4=W2
и E4=E2.
Поэтому поступаем так. На картинке
скоростей m-m
выбираем произвольную точку (m)
и из неё откладываем вектор
Планы ускорений
первым и вторым способом строятся из
оснований аналогичных рассуждений. 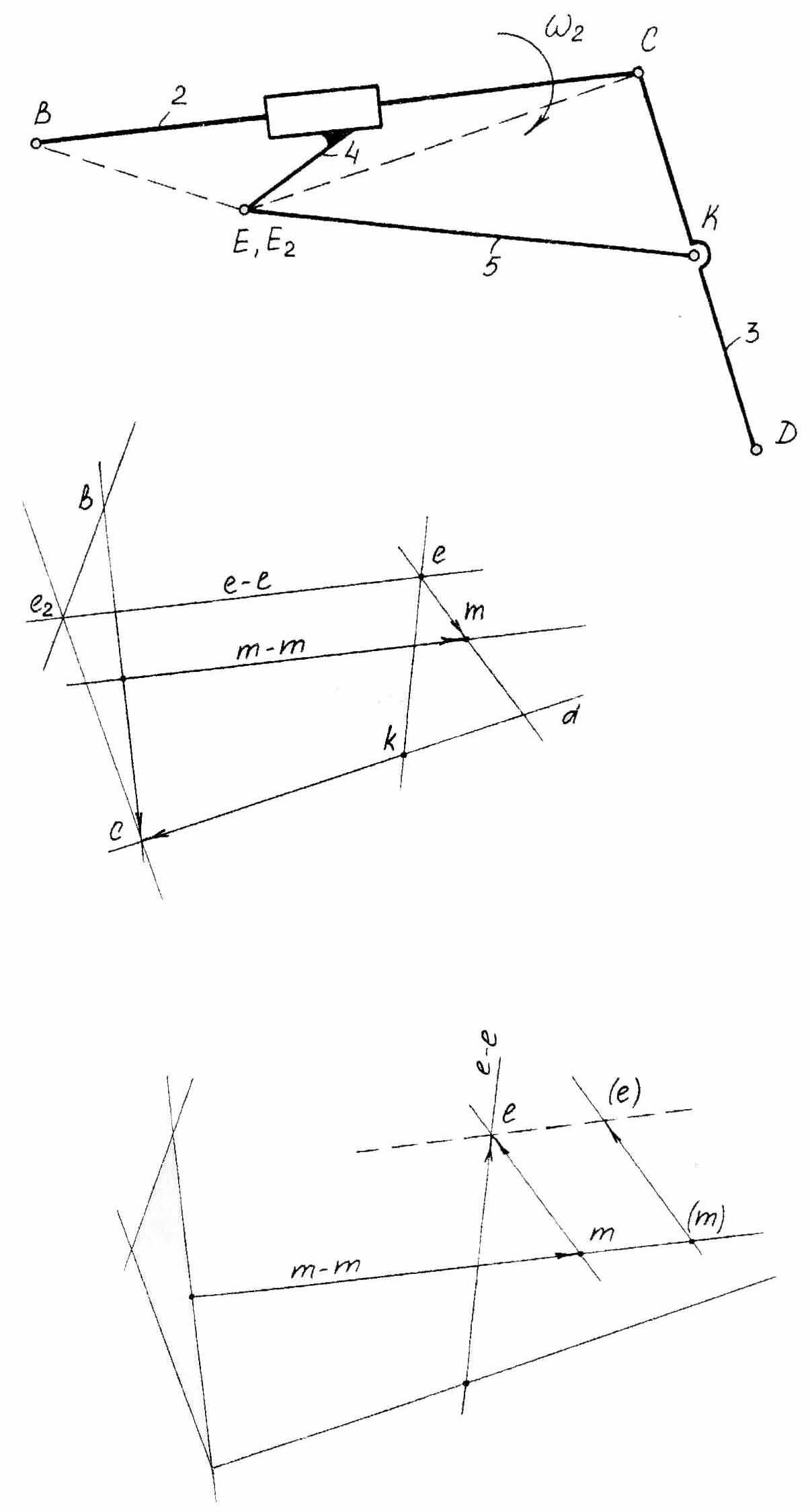
![]() ,
величина которого по известной угловой
скоростиW4
определяется так
,
величина которого по известной угловой
скоростиW4
определяется так
![]() ;
при этом, конечно, учитывается, что
направлениеW4
совпадает с направлением W2.
Конец этого вектора обозначается (e).
Переносим этот вектор параллельно
картине m-m.
При этом точка (m)
перемещается по картине m-m,
а точка (e)
по прямой (пунктир), которая также
параллельна картине m-m,
до встречи со своей картиной скоростей
e-e.
Здесь и определиться её истинное
положение. Проведя из неё вектор
;
при этом, конечно, учитывается, что
направлениеW4
совпадает с направлением W2.
Конец этого вектора обозначается (e).
Переносим этот вектор параллельно
картине m-m.
При этом точка (m)
перемещается по картине m-m,
а точка (e)
по прямой (пунктир), которая также
параллельна картине m-m,
до встречи со своей картиной скоростей
e-e.
Здесь и определиться её истинное
положение. Проведя из неё вектор
![]() , находим истинное положение и точкиm.
, находим истинное положение и точкиm.
Рисунок 4.2