

Лабораторная работа № 5 Настройка параметров пид-регулятора.
Цель работы: ознакомиться с процедурой настройки параметров ПИД-регулятора и приобрести основные навыки его настройки.
Теоретические сведенья:
Эмпирический метод настройки Циглера-Никольса.
Задача обеспечения приемлемых динамических качеств замкнутой системы с помощью регуляторов, обеспечивающих типовые линейные алгоритмы управления (П-, ПИ- или ПИД-) устойчивыми объектами, параметры которых точно измерить не удается, может решаться другим методами. Один из них – эмпирический мотод настройки параметров ПИД-регулятора Циглера-Никольса. В этом случае результат можно получить, используя метод замкнутого контура Зиглера-Никольса. Метод состоит в следующем:
а) к выходу регулятора или объекта подключается самопишущий потенциометр, а интегральное и дифференциальное воздействия регулятора - блокируются (исключаются).
б) затем коэффициент пропорциональности регулятора Кп постепенно увеличивают, пока при некотором значении этого коэффициента Кп пред в системе не установятся устойчивые колебания с периодом Т пред. ( см. рис. 5.1)

Рисунок 5.1
в) далее рассчитываются и устанавливаются параметры регулятора на основе следующих соотношений:
Для П- регулятора Кп= 0.5 Кп пред;
Для ПИ- регулятора Кп= 0.45 Кп пред, Ти= Т пред/1.2;
Для ПИД- регулятора Кп= 0.6 Кп пред, Ти= Т пред/2, Тд= Т пред/8.
Программа выполнения работы:
Пример эмпирического метода настройки Циглера-Никольса
1. Исходный файл для выполнения работы L05_Настройка параметров ПИД регулятора.vi

2. Передаточная функция объекта регулирования:
 .
.
3. Для того, чтобы задать передаточную функцию данной системы, нужно на лицевой панели виртуального прибора ввести следующие параметры:
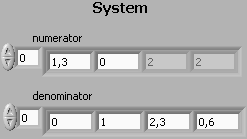
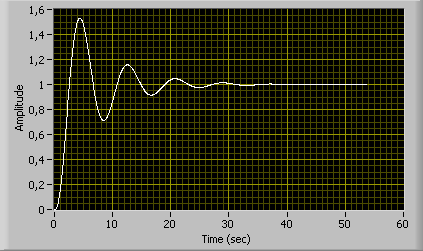
Изначально до введения ПИД-регулятора переходная характеристика системы имеет вид:
4. Находим Кп.пред. – предельный коэффициент усиления пропорциональной составляющей ПИД-регулятора, при котором система будет находиться на границе устойчивости. При этом дифференциальную и интегральную составляющую ПИД-регулятора необходимо отключить.
Подобрать Кп.пред. можно эмпирически, постепенно повышая его значения и следя за тем, как изменяется переходная характеристика.
Так же для нахождения Кп.пред. можно воспользоваться алгебраическим критерием устойчивости Гурвица:
![]()

Тогда характеристическое уравнение примет вид:
![]()
Данный порядок системы является частным случаем алгебраического критерия устойчивости Гурвица. Для того, что бы система была устойчивой, необходимо:

Для
нахождения
![]() решаем уравнение:
решаем уравнение:
![]() ;
;
![]() ;
;
![]() .
.
5.
Теперь подставляем в модель
![]() ,
при этом устанавливаем
,
при этом устанавливаем![]() и
и![]() .
.

При этом мы сможем увидеть на переходной характеристике то, что при данных параметрах ПИД-регулятора система действительно находится на границе устойчивости:

При этом Т пред=5,1 с.
6. Для нахождения остальных параметров ПИД-регулятора воспользуемся аналитическими выражениями, приведенными в теоретических сведениях.
Для ПИД- регулятора Кп= 0.6 Кп пред, Ти= Т пред/2, Тд= Т пред/8.
Кп= 0,6* Кп пред=0,6*3,8333=2,2999;
Ти= Т пред/2=5,1/2=2,55;
Тд= Т пред/8=5,1/8=0,635.
Зададим полученные параметры в системе:

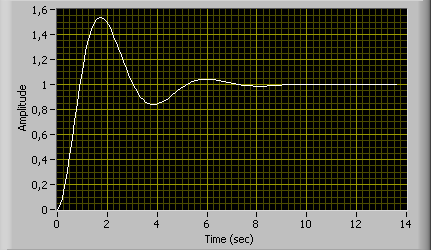
В результате переходной процесс примет следующий вид:
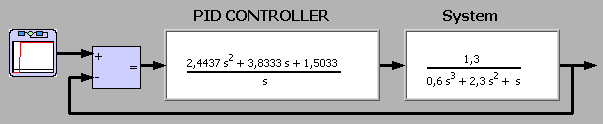
А сама система автоматического регулирования с введением ПИД-регулятора будет иметь следующий вид:
Контрольные вопросы:
1) В чем заключается метод настройки Циглера-Никольса?
2) Сделать вывод об улучшении показателей качества системы последействияПИД - регулятора.?