

2.2. Пружинный маятник
Если колебательная система совершает гармонические колебания, имея одну степень свободы, то она называется линейным классическим гармоническим осциллятором.
Примерами классического линейного осциллятора являются пружинный маятник, математический, физический маятники и др.
Рассмотрим колебания пружинного маятника.
Пружинный маятник представляет собой некоторый груз массой m, закрепленный на пружине с коэффициентом жесткости k, совершающий свободные гармонические колебания (рис. 2.2).
Гармонические колебания называют свободными, если они совершаются только под действием сил, вызывающих эти колебания.
Частоту свободных гармонических колебаний называют собственной частотой (0), так как она зависит только от свойств самой физической системы.
Найдем дифференциальное уравнение свободных гармонических колебаний пружинного маятника. На маятник действует сила тяжести
G = mg
и сила упругости (закон Гука, рис. 2.2) Fупр = – кх,
Рис. 2.2
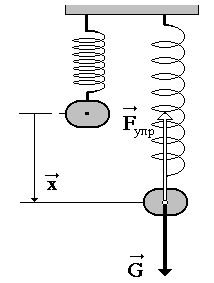
Эти силы в состоянии покоя равны по величине, но противоположны по направлению (третий закон Ньютона).
Однако при колебаниях сила упругости изменяется периодически по величине и по направлению.
Значит, силой, вызывающей колебания пружинного маятника, является сила упругости.
При этом выполняется следующее соотношение:
maх = – kx,
где
![]() ,
,
тогда
 .
(2.1)
.
(2.1)
Последнее выражение приведем к нормальному виду однородного дифференциального уравнения второго порядка, описывающего одномерное (с одной степенью свободы) движение пружинного маятника, например, вдоль оси Х:
 .
(2.2)
.
(2.2)
Решением данного дифференциального уравнения является функция
х = Асos (оt + o). (2.3)
Выразим k в уравнении (2.2) через собственную круговую частоту 0 и смещение х.
Для этого достаточно вспомнить, что ускорение
![]() .
(2.4)
.
(2.4)
Используя выражения (2.1) и (2.4), запишем, что
F = ma = m о2х. (2.5)
С другой стороны, при колебаниях пружинного маятника роль действующей силы выполняет сила упругости (речь о ней шла выше)
Fупр = – кх. (2.6)
Из соотношений (2.5) и (2.6) имеем
m о2х = – кх.
После несложных преобразований получим
k = m о2. (2.7)
Дифференциальное уравнение (6.24) принимает следующий вид:
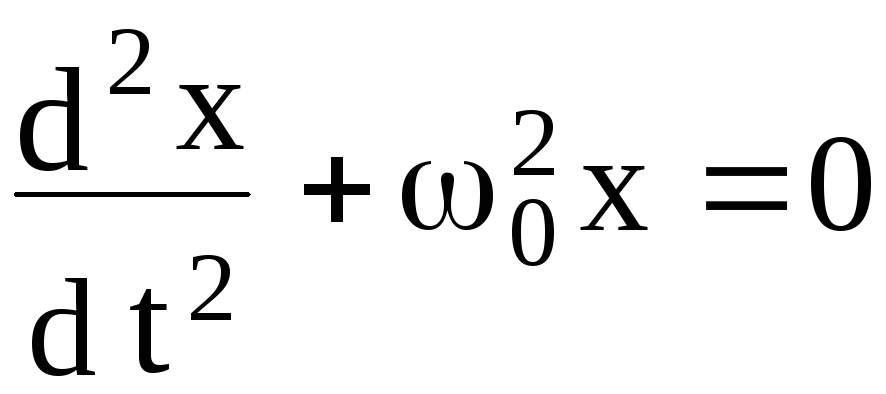 .
(2.8)
.
(2.8)
Напомним, что уравнение вида (2.8) является общим для всех физических систем различной природы, совершающих свободные гармонические колебания, только вместо смещения х используется величина, характеризующая колебания данной системы, например, колебание заряда (q), тока (I) и т. д. Сравнивая общее дифференциальное уравнение гармонических колебаний (2.8) и дифференциальное уравнение колебаний пружинного маятника (2.2), приходим к заключению, что квадрат круговой частоты прямо пропорционален коэффициенту жесткости пружины и обратно пропорционален его массе:
![]() (2.9)
(2.9)
Найдем период колебаний пружинного маятника.
Из кинематики вращательного движения известно, что период и угловая скорость (круговая частота) связаны соотношением
T
=
![]() .
.
Следовательно, период колебаний пружинного маятника
![]() .
(2.10)
.
(2.10)
Вывод: Период колебаний пружинного маятника прямо пропорционален квадратному корню массы маятника и обратно пропорционален квадратному корню коэффициента жесткости пружины.
Замечание: Выводы, полученные при рассмотрении колебаний пружинного маятника, можно использовать в задачах, связанных с колебаниями атомов и молекул различных физических систем.