

2.9. Понятие о связанных гармонических осцилляторах
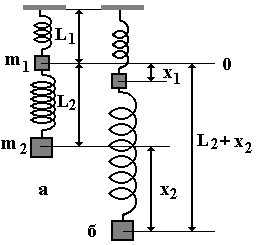
Рассмотрим процесс малых колебаний двух пружинных маятников с массами грузов m1 и m2 и с коэффициентами жесткости пружин k1 и k2 соответственно, соединенных последовательно (рис.2.10).
Рис.
2.10
![]() (2.43)
(2.43)
![]() (2.44)
(2.44)
где
![]()
![]()
![]()
Используя метод характеристического уравнения, решения уравнений (2.43) и (2.44) запишем в виде: (2.45)
где А1 и А2 некоторые постоянные. В результате после подстановки уравнения (2.45) в (2.43) и (2.44), используя только вещественные части этих решений, окончательно получим:
x1 = а1 cos(1t + 01) + a2 cos(2t + 02), (2.46)
x2 = 1а1 cos(1t + 01) + 2a2 cos(2t + 02), (2.47)
где а1, а2, 1, 2 – некоторые постоянные;
причем
 (2.48)
(2.48)
Если ввести новые динамические переменные (обобщенные координаты) 1 и 2, т. е. 1 = а1cos (1t + 01), 2 = а2cos (2t + 02), то каждая переменная будет изменяться по гармоническому закону с амплитудами а1 и а2 и начальными фазами 01 и 02, соответственно. Совершаемые новыми динамическими переменными 1 и 2 простейшие гармонические колебания называют нормальными колебаниями системы связанных осцилляторов (нормальными модами).