

1.34. Векторная связь линейной и угловой скоростей
Пусть
абсолютно твердое тело вращается вокруг
неподвижной оси с угловой скоростью![]() Выберем
на оси за начало отсчета т. 0 (рис. 21).
Выберем
на оси за начало отсчета т. 0 (рис. 21).
Рис.
21

![]() .
Разложим радиус-вектор
.
Разложим радиус-вектор![]() на составляющие:
на составляющие:![]() Тогда, согласно рис.1.21, имеем
Тогда, согласно рис.1.21, имеем![]() .
Эти векторы расположены во взаимно
перпендикулярных плоскостях (рис. 22).
Действительно, согласно (22) и рис. 21,
имеем
.
Эти векторы расположены во взаимно
перпендикулярных плоскостях (рис. 22).
Действительно, согласно (22) и рис. 21,
имеем
v = R или v = r, (64)
где
R = r,
а угол между вектором угловой скорости
![]() и
вектором
и
вектором![]() равен
90о.
Согласно рис. 21 имеем r=
r
sin .
С учетом этого формула (64) примет вид v
= r
sin
,
т. е. имеем дело с векторным произведением
равен
90о.
Согласно рис. 21 имеем r=
r
sin .
С учетом этого формула (64) примет вид v
= r
sin
,
т. е. имеем дело с векторным произведением
Рис. 1.22

![]() .
(65)
.
(65)
Так как
![]() ,
,
то формула (1.65) принимает вид
![]() .
.
Учитывая,
что векторное произведение двух
коллинеарных векторов равно нулю (![]() ,
рис. 21), получим
,
рис. 21), получим
![]() .
(66)
.
(66)
Векторное произведение всегда связано с правилом правого винта.
Поэтому,
вращая головку винта по направлению от
вектора
![]() ,
стоящего на первом месте в (65), к вектору
,
стоящего на первом месте в (65), к вектору![]() ,
стоящему на втором месте, определяем
по поступательному движению винта
направление третьего вектора
,
стоящему на втором месте, определяем
по поступательному движению винта
направление третьего вектора![]() ,
равного векторному произведению (рис.
22).
,
равного векторному произведению (рис.
22).
Вектор линейной скорости равен векторному произведению вектора угловой скорости и радиус-вектора.
Абсолютная величина этого векторного произведения
![]() (67)
(67)
или v = r sin90O= r , так как r sin = r .
1.35. Связь векторов тангенциального ускорения
и углового ускорения
Проведя аналогичные рассуждения, можно показать, что
![]() .
(68)
.
(68)
Вектор касательного ускорения равен векторному произведению вектора углового ускорения и радиус-вектора.
По модулю а = r sin . Вектор нормального ускорения
![]() ,
(
,
(![]() ).
(69)
).
(69)
Рис.
23
Рис.
24
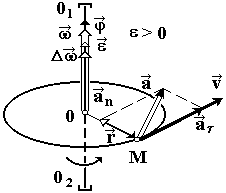

В заключение определим положение аксиальных векторов:
![]()
и
полярных векторов:
![]() в случае равноускоренного
> 0 (рис. 23) и равнозамедленного
< 0 (рис. 24) вращения м. т. вокруг
неподвижной оси.
в случае равноускоренного
> 0 (рис. 23) и равнозамедленного
< 0 (рис. 24) вращения м. т. вокруг
неподвижной оси.