

1 Анализ статической устойчивости электроэнергетической системы
Выключатели линии Q1 и Q2 и выключатель системы бесконечной мощности Q включены. Системы GS обладает бесконечным регулирующим эффектом нагрузки, что приводит к неизменности напряжения на шинах эквивалентной системы, а поэтому при изменениях режима напряжение Uн будет постоянным, рисунок 2.
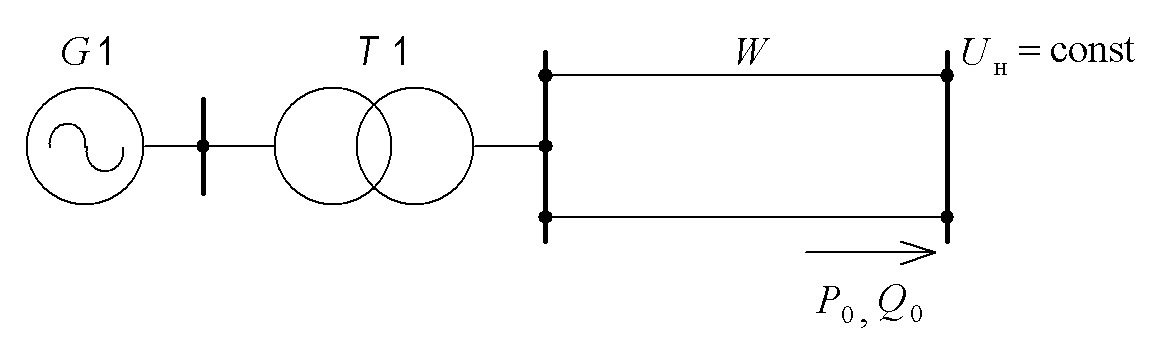
Рисунок 2 – Схема электропередачи
Выбор базисных условий
Расчет проводим в относительных единицах при базисных условиях и точном приведении параметров схемы к выбранной ступени напряжения, т. е. с учетом действительных коэффициентов трансформации [2].
За базисное напряжение примем напряжение на шинах эквивалентной системы GS «бесконечной» мощности Uб1 = 220 кВ. Базисную мощность примем равной Sб = 1000 МВ∙А.
Определим базисные напряжения других ступеней, кВ
![]()
Определение параметров режимов и схемы замещения
Определим сопротивления элементов:
– эквивалентного генератора G1
 ;
;
![]() ;
;
 ;
;

– эквивалентного генератора G2
 ;
;
– эквивалентного трансформатора Т1
 ;
;
– эквивалентного трансформатора Т2
 ;
;
– линии W:
![]()
Исходная схема замещения системы представлена на рисунке 3.
Представим номинальную полную мощность нагрузки и мощность, подтекающую к шинам неизменного напряжения, в виде суммы активной и реактивной составляющих.
Мощность нагрузки
![]()

Рисунок 3 – Исходная схема замещения системы
Передаваемая мощность электропередачи
![]()
Напряжение основной ступени
![]()
Анализ устойчивости электропередачи при отсутствии АРВ без учета явнополюсности ротора эквивалентного генератора
Расчетная схема замещения электропередачи представлена на рисунке 4.
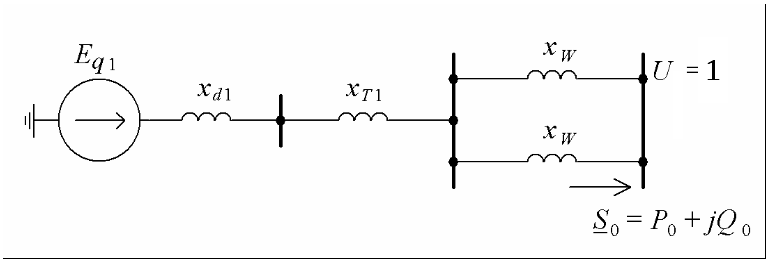
Рисунок 4 – Схема замещения электропередачи
В данном случае имеет место равенство синхронных индуктивных сопротивлений по продольной и поперечной осям xd = xq, а также постоянство синхронной ЭДС Еq = const, которая пропорциональна току возбуждения if.
Определим сопротивление электропередачи (суммарное сопротивление электрической сети между шинами эквивалентного генератора G1 и шинами неизменного напряжения)
![]()
Суммарная реактивность
![]()
Определяем синхронную ЭДС (холостого хода) генерирующей станции

Угол
сдвига векторов
![]() и
и![]()
![]()
Для проверки исходного режима воспользуемся выражением, определяющим передаваемую мощность
![]()
Определим предел (идеальный) передаваемой мощности
![]()
Угловая характеристика мощности представлена на рисунке 5.
Коэффициент запаса статической устойчивости по передаваемой мощности, %
![]()
Анализируя значение коэффициента запаса статической устойчивости, можно сделать вывод о том, что система является слабо загруженной, работающей с большим запасом по статической устойчивости.

Рисунок 5 – Угловая характеристика мощности генератора G1
без учета явнополюсности и отсутствии АРВ
1.4 Анализ устойчивости электропередачи при отсутствии арв с учетом явнополюсности ротора эквивалентного генератора
Гидрогенератор
представляем в расчетах синхронной
реактивностью по поперечной оси xq
и фиктивной
расчетной ЭДС ![]() ( зависит от режима), рисунок 6
( зависит от режима), рисунок 6

Рисунок 6 – Схема замещения электропередачи
Суммарная реактивность
![]()
Расчетная ЭДС ЕQ

Угол
сдвига векторов
![]() и
и![]()
![]()
Синхронная
ЭДС ![]()
![]()
Проверка исходного режима

Угловая характеристика мощности представлена на рисунке 7 .
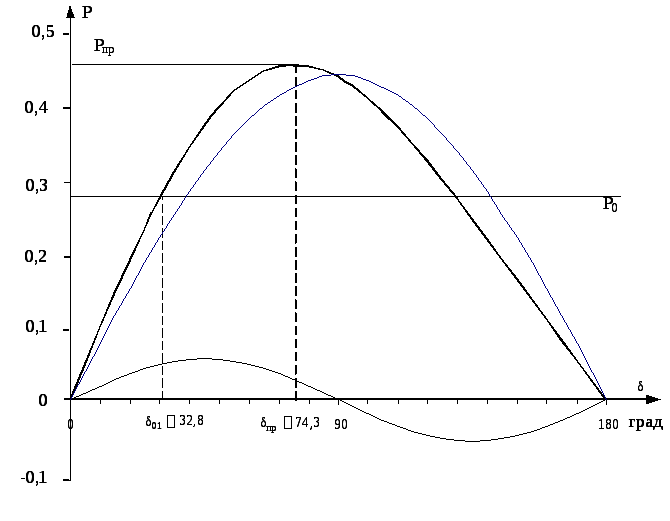
Рисунок 7 – Угловая характеристика мощности генератора G1
с учетом явнополюсности и отсутствии АРВ
Для определения предельной величины активной мощности в этом случае нужно найти угол, обеспечивающий максимальное значение последнего выражения. Приравниваем производную активной мощности по углу нулю, получим квадратное уравнение и решаем его относительно cos.
![]() ;
;
![]() ;
;
![]() ;
;
![]() ,
,
![]() ;
;
![]() ,
,
![]() не существует.
не существует.
Определим предел передаваемой мощности
![]()
Коэффициент запаса статической устойчивости по передаваемой мощности, %
![]()
Сравнительный анализ влияния конструктивных особенностей гидрогенератора приведен в таблице 7.
Таблица 7 – Сравнительные параметры режима генератора G1 при отсутствии АРВ с учетом и без учета явнополюсности
|
Параметр режима |
Учет явнополюсности | |
|
нет |
да | |
|
|
1,858 |
1,829 |
|
|
42,5 |
32,82 |
|
|
90 |
74,28 |
|
|
0,429 |
0,441 |
|
|
47,9 |
52,07 |
Учет явнополюсности увеличивает предел передаваемой мощности и, как следствие, возрастает запас статической устойчивости по передаваемой мощности. Характеристика мощности явнополюсного генератора кроме основной синусоидальной составляющей содержит вторую составляющую – синусоиду двойной частоты, амплитуда которой пропорциональна разности индуктивных сопротивлений xd и xq. Составляющая двойной частоты смещает максимум характеристики мощности в сторону меньших углов. Амплитуда характеристики мощности возрастет по сравнению с характеристикой, не учитывающей явнополюсности машины. У явнополюсной вращающейся машины устойчивость (по углу) нарушается раньше неявнополюсной машины равной мощности.