Chapter 7
Embedding
Bluetooth
Applications
Solutions in this chapter:
■Understanding Embedded Systems
■Getting Started
■Running an Application under the Debugger
■Running an Application on BlueCore
■Using the BlueLab Libraries
■Deploying Applications
Summary
Solutions Fast Track
Frequently Asked Questions
265
266 Chapter 7 • Embedding Bluetooth Applications
Introduction
Bluetooth wireless technology is proving popular for handheld mobile devices such as mobile phones and headsets, which have very limited space and power. Using an extra host processor to run applications takes up extra space, uses extra power, and adds cost, too. For the ultimate in compact design, low cost, and energy efficiency Bluetooth applications can be run directly on the same processor that drives the Bluetooth baseband.
Vendors who supply designs for Bluetooth Application-Specific Integrated Circuits (ASICs) also provide interfaces which allow custom applications to run on the same microprocessor which drives the Bluetooth baseband. It is also possible to run applications on commercially available chips.This chapter looks at embedded applications using as an example Cambridge Silicon Radio (CSR)’s BlueLab system for programming embedded applications on BlueCore chips.
Not every application is suitable for embedding on a BlueCore chip. Small simple applications such as the Headset and Audio Gateway profiles, as well as things like central heating controllers or TV remote controllers, are suitable for embedding on a single chip. High-bandwidth or complex applications such as a local area network (LAN) access point are better suited to implementation using a separate host processor.
This is because when an application is running on the same chip as a Bluetooth protocol stack, the application and firmware stack must share the available RAM on the chip. For a single channel RFCOMM-based application, the available RAM is several hundred words.The application code and its constant data must fit into just under 32K words.
Embedded applications running on a BlueCore chip are run under an interpreter called the Virtual Machine (VM). Interpreting application opcodes confers a significant performance penalty which limits suitable applications. For devices such as headsets, most of the time all that is happening is audio input/output (I/O). Control operations are comparatively infrequent, and involve simpler operations than would happen on devices such as LAN access points.
In this chapter, we’ll look at some of the implications of these limitations and give some examples of how much can still be done in embedded applications.We’ll take you through how to build applications which can be run on BlueCore, and explain how to build run and debug both on PCs and on the BlueCore chip itself.
What you need to know before reading this chapter is:
■The C programming language
■The basics of embedded programming: tasks and message queues
www.syngress.com
Embedding Bluetooth Applications • Chapter 7 |
267 |
Understanding Embedded Systems
This section assumes that you’ve done some programming, but you don’t have embedded experience. If you’ve worked with embedded systems before, you might want to skip straight to the “Getting Started” section. For the rest of you, we’ll go over tasks, queues, stacks, interrupts, and the difference between running code on a PC and code embedded on hardware.
Understanding Tasks, Timers, and Schedulers
In a Bluetooth system, there are many different tasks to take care of: Link Management messages must be processed; incoming data must be dealt with as it arrives; outgoing data has to be sent to the baseband and radio; if there is a separate host communications through the host controller interface this must be addressed; all this and more must be handled simultaneously. Having a microprocessor for each task would be far too expensive, so the solution is for one microprocessor to swap between tasks, spending a little time on each in turn.This is called multi-tasking.
Each task has its own call stack, its own I/O queues, and each task gets a turn at the processor.There is one task which coordinates the rest.This is usually called a kernel, but is also referred to as a scheduler. Different embedded systems handle swapping between tasks in different ways, some assign priorities to tasks, so that a lowpriority task does not stop a high-priority task from running.The BlueCore01 system has a simple round-robin scheduler, which runs each task in turn.
The scheduler stops running a task when the task blocks. A task blocks by making a system call which waits for an event.This behavior means that the scheduler is vulnerable to a task putting itself into an infinite loop. Since the task would never block, no other task would ever get a chance to run.
On the face of it, this means you could disable the whole Bluetooth system if your application didn’t block often enough. Since there are many time-critical operations within the Bluetooth stack, you could easily stop the stack from working properly.To solve this problem BlueCore provides an environment called the Virtual Machine which protects the stack code from applications which try to take too much processor time. Instead of your application code being called directly, the scheduler calls the Virtual Machine.The Virtual Machine then runs a number of operations through its interpreter, and afterward blocks so the scheduler can call another task. It doesn’t matter if your code is in an infinite loop, the Virtual Machine will still only run a preset number of your application’s instructions, so your endless loop can’t run endlessly!
www.syngress.com

268 Chapter 7 • Embedding Bluetooth Applications
The processor time used by other tasks in the system will vary. For instance, when the Link Manager task is in the middle of negotiating link configuration, it will require more processor time than when no Link Management messages are being received.This means that the time between calls to the Virtual Machine will vary.The impact on your application is that BlueCore does not provide Real Time Operating System (RTOS) capabilities because it makes no guarantees regarding how often it will call your application code.
Understanding Messaging and Queues
The tasks in a system need some way of passing information to one another. One task may not be ready to receive a message at the same time another task wants to send it, so some way is needed to store messages for a task until it is ready to deal with them.
Each task has a queue where messages can wait to be picked up. A queue is a first-in first-out (FIFO) data structure.That is to say, the first message to be put into the queue is the first message to come out: messages are received in the same order that they were sent. Several different tasks can send messages to one task by putting messages onto that task’s queue.
When a message is created and sent, some memory is temporarily allocated to store the message. It then waits on the queue until it can be processed by the receiving task. After processing, the message is destroyed and its memory is returned to the free pool.
The message queues allow tasks to send one another messages asynchronously: it doesn’t matter if tasks run at different speeds, the queues buffer messages so that they can still communicate.The exact mechanisms for sending and receiving messages are explained in more detail in the following section on the message library:“Using Tasks and Messages.”
Using Interrupts
Embedded systems need to react to the outside world. A typical embedded system will be connected to some electronic hardware and must react to signals from it, and send signals to control it. Interrupts provide the means for hardware to interact with software. An interrupt is a signal which makes the CPU stop running its current program and jump to a special interrupt routine.The interrupt routine is essentially just another subroutine—you just get to the interrupt routine because of an interrupt signal, rather than because you were called by another function.
www.syngress.com

Embedding Bluetooth Applications • Chapter 7 |
269 |
Hardware is connected to pins which cause interrupts—commonly called interrupt lines. BlueCore01 has two interrupt lines available for connecting up to custom hardware. But keep in mind, the number of interrupt lines available will vary from system to system.
On BlueCore01 the interrupt routines are already written. If the interrupt lines change state, the interrupt routine will cause an event to be generated.The event is VM_EVENT _PIOINT, which stands for Virtual Machine Event Parallel Input Output Interrupt.
Interrupts usually have to be enabled before they can be used.This stops lines which are not currently in use, causing undesirable effects. BlueLab works just the same: by default, no events will happen, if you want your application to respond to an event, you must enable that event using the following call:
uint16 EventEnable(vm_event_source source, int enable);
So, to enable the PIO interrupt event you use:
EventEnable(VM_EVENT_PIOINT, 1);
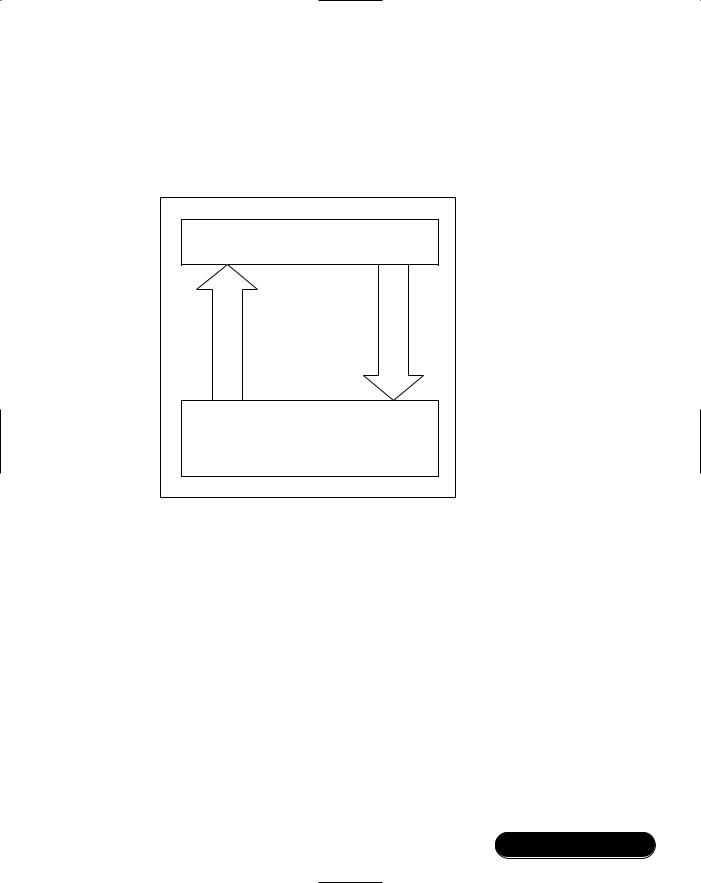
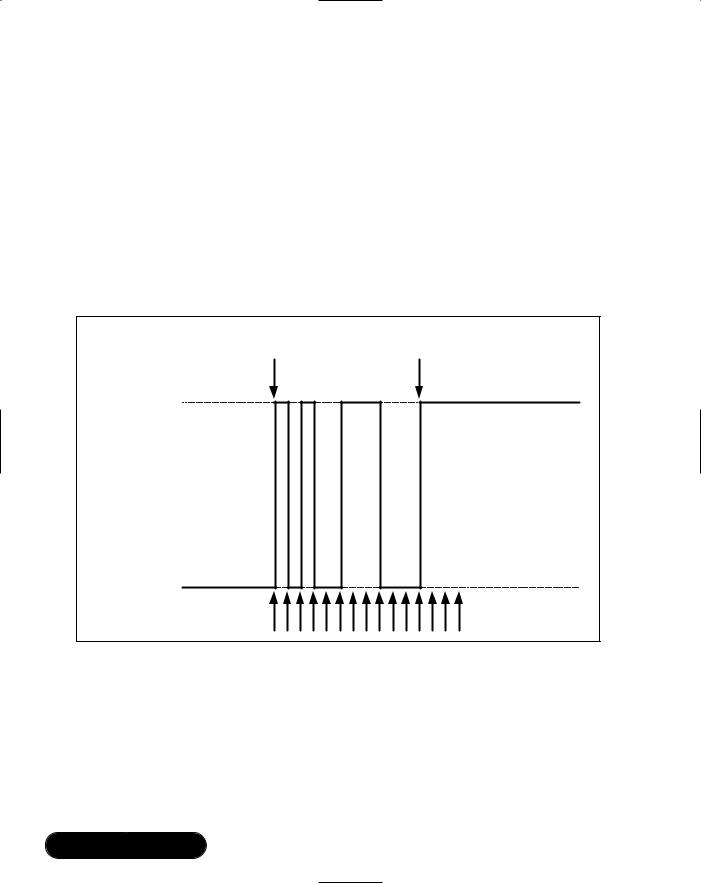
A common use for an interrupt line is to connect a push button switch so that software can react to a user pressing a button. One problem, which is not immediately obvious, is that switches don’t just move straight from one state to another. As the contacts close, there is usually a “bounce,” which causes the switch to rapidly open and close several times (see Figure 7.1). Software can run fast enough for one push on a button to trigger several interrupts.
The solution to the problem is to debounce interrupt lines which are connected to pushbuttons, keyboards, or any other hardware which might oscillate before settling to a stable value. On many embedded systems, you will have to write a debounce function which catches the first interrupt from a line, disables interrupts, and then samples the line state periodically until it is stable. System code on BlueCore01 includes a debounce engine, and BlueLab provides a function for you which accesses it. All you need to do is call:
Void Debouncesetup(uint16 mask, uint16 count, uint16 period);
This sets up the debounce engine so that when the interrupt line specified by the mask parameter changes, the engine begins reading the pin at the interval specified by the period parameter (in milliseconds), until it has seen the same value count times. Once the line is stable, the engine sends the VM_EVENT_PIOINT event to application code.The application code can then get the stable value of the interrupt line using the call:
www.syngress.com
270 Chapter 7 • Embedding Bluetooth Applications
uint16 DebounceGet (void);
So, for instance, to sample PIO line 5 at 2 millisecond (ms) intervals and wait until it has been stable four times in a row, you would use:
Void Debouncesetup(1 << 5, 4, 2);
Setting the sampling period to zero switches off debouncing, so you then get an event for every single transition of the line.To switch off debounce on PIO line 5, you would use:
DebounceSetup(1<<5, 1, 0);
Figure 7.1 Switch Bounce
User presses |
Switch stops |
switch here |
oscillating here |
Switch on |
|
(interrupt line |
|
high) |
|
Switch off |
|
(interrupt line low) |
Keep sampling until |
|
|
|
switch is in a stable state |
Hardware interrupts aren’t the only type of interrupt. Many systems also allow software to generate interrupts.This is done when errors happen, such as a divide by zero operation, or an attempt to access memory that doesn’t exist. Software interrupts are usually irrecoverable and result in a system reset.To prevent this from happening, the Virtual Machine interpreter checks user application code on BlueCore for illegal accesses.
www.syngress.com
Embedding Bluetooth Applications • Chapter 7 |
271 |
Getting Started
BlueLab builds code for CSR’s BlueCore chips. So, in addition to BlueLab, you will need a Casira development system.The development tools run on a Win32 PC—therefore, you will need administrator rights on the PC to install the tools.
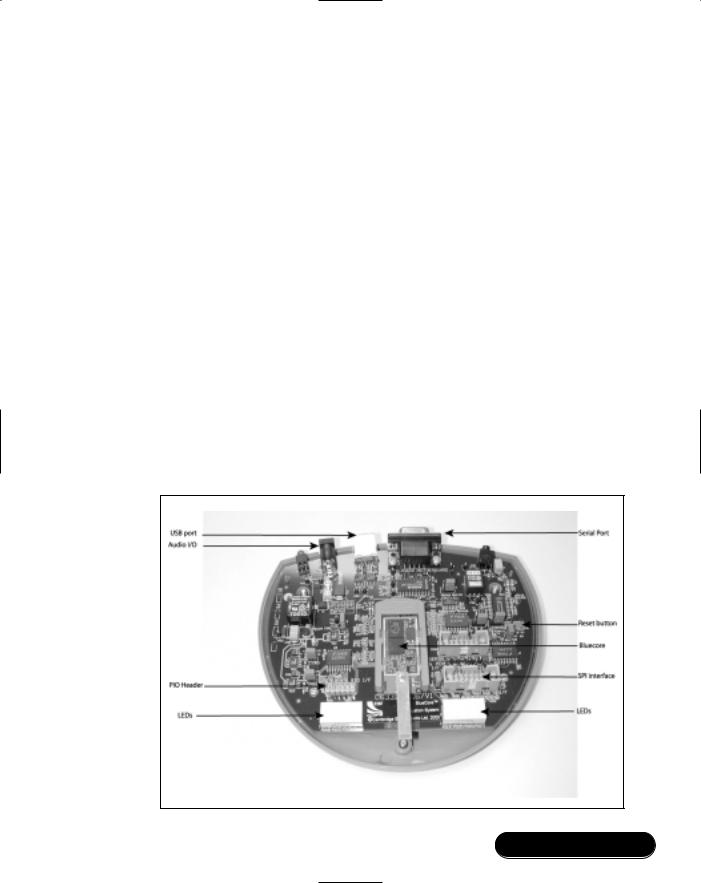
The BlueCore module is supplied on a carrier board which slots into a blue plastic carrier in the center of the Casira (see Figure 7.2).The circuitry on this board is what would be used in most end-user products.The rest of the Casira development kit provides extra facilities to allow you to develop and debug applications, providing a variety of useful interfaces:
■SPI interface Connects to a PC parallel port, and allows you to reconfigure the Casira using the PSTool utility. Images can also be downloaded to the Casira using the Serial Peripheral Interface (SPI).
■Serial interface Connects to a PC serial port. BlueLab uses BlueCore Serial Protocol (BCSP), so you must ensure your Casira is configured to use BCSP. (Casiras are sold ready to use BCSP.)
■USB port Connects to a PC USB port, and supports the Bluetooth Specification’s USB protocol (H2) when correctly configured.
Figure 7.2 Casira Development Kit
www.syngress.com
272Chapter 7 • Embedding Bluetooth Applications
■Audio I/O An audio jack which connects to the headsets supplied with the Casira.
■LEDs These can be used to monitor applications running on the BlueCore chip.
■PIO lines Parallel Input-Output lines; useful for connecting custom hardware.
Developing & Deploying…
BCSP and H4
The 1.1 Bluetooth Specification provided two serial interfaces: UART (H4) and RS232 (H3). Casiras can be configured to use the UART (H4) protocol across its serial port interface, but they are sold configured to use BlueCore Serial Protocol (BCSP). BCSP provides extra error checking on the serial interface, so it is more reliable in situations where errors can happen on the serial interface. BCSP also provides separate channels for voice, control, and data. This allows data to be flow-controlled while voice traffic flows remain uninterrupted.
Some stack vendors support BCSP, but not all do. To compensate, Casiras may be reconfigured to support the 1.1 Specification’s UART (H4) interface.
The serial port settings are stored in the BlueCore persistent store (flash). A Persistent Store tool (PSTool) utility is available to change these settings.
The procedure for changing the serial port settings to BSCP is as follows:
■Connect the SPI cable between the Casira and a PC parallel port.
■Give the PSTool utility low-level access to the parallel port by installing a device driver. To do this, run the batch file BlueLab20\bin\InstParSPI.bat (this requires administrator rights).
■Register the PSTool user interface in the Windows registry by running BlueLab20\bin\RegPSToolocx.bat.
■Run the PSTool utility, selecting SPI interface.
■Access the developer list of tools by pressing Ctrl+Alt+D.
■Set the key Host Interface to UART link running BCSP.
Continued
www.syngress.com
Embedding Bluetooth Applications • Chapter 7 |
273 |
■ Set the key UART Configuration Bitfields to 6.
To set a Casira to use the 1.1 Specifications UART protocol (H4), the following settings are used:
■Set the key Host Interface to UART link running H4.
■Set the key UART Configuration Bitfields to 168.
Note that to set a PS key, the Set button in the PSTool application must be pressed. Simply typing in the new value will not work. To be absolutely sure you have successfully set the new value, you can use the Read button to read back the current value.
Installing the Tool Set
BlueLab uses Cygwin, a Unixlike environment run under Windows. Cygwin is installed by running setup.exe from the Cygwin directory on the BlueLab CD. When prompted, choose to Install from local directory, and press Next twice. Now choose your installation directory, Unix text file type, and install for All.This installs all the tools which BlueLab needs.
The debugger from BlueLab is written in Java and requires version 1.3 or later of the Java2 runtime environment.To install the Java2 runtime environment, run the file setup.exe from the Java directory on the CD and follow the instructions. Finally, install BlueLab by running BlueLab.exe from the main directory on the CD.
Building a Sample Application
To test the installation, it is a good idea to compile a sample application. Starting Cygwin, go to the relevant directory and run make.
$ cd /cygdrive/c/BlueLab20/apps/hello
$ make
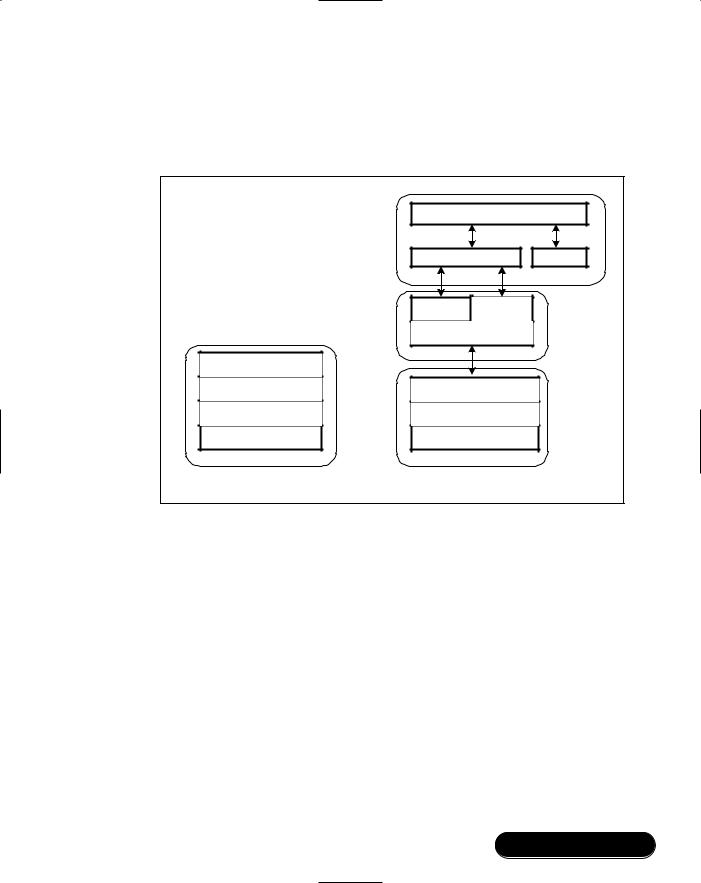
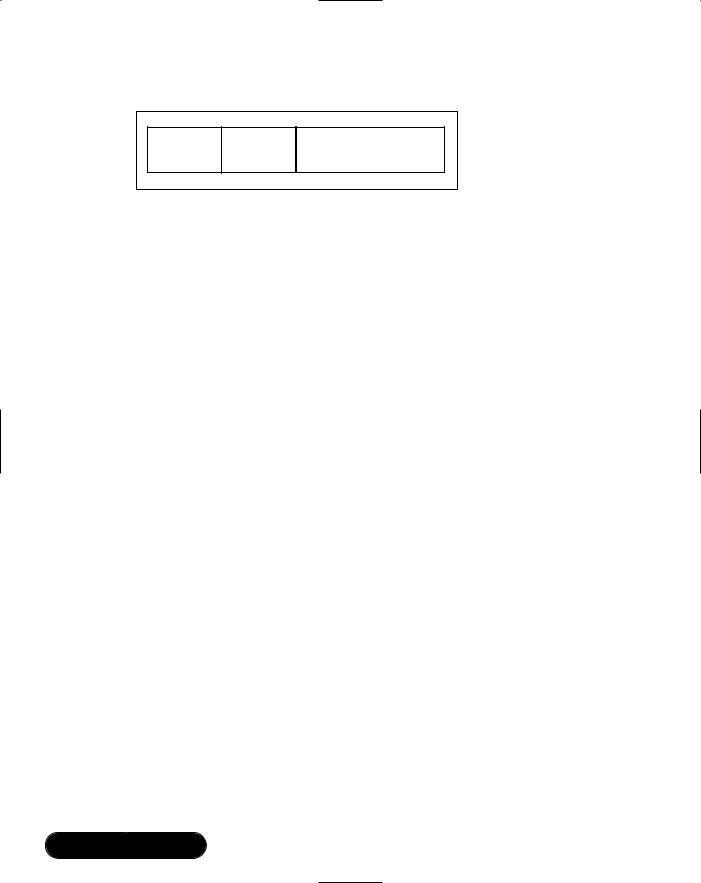
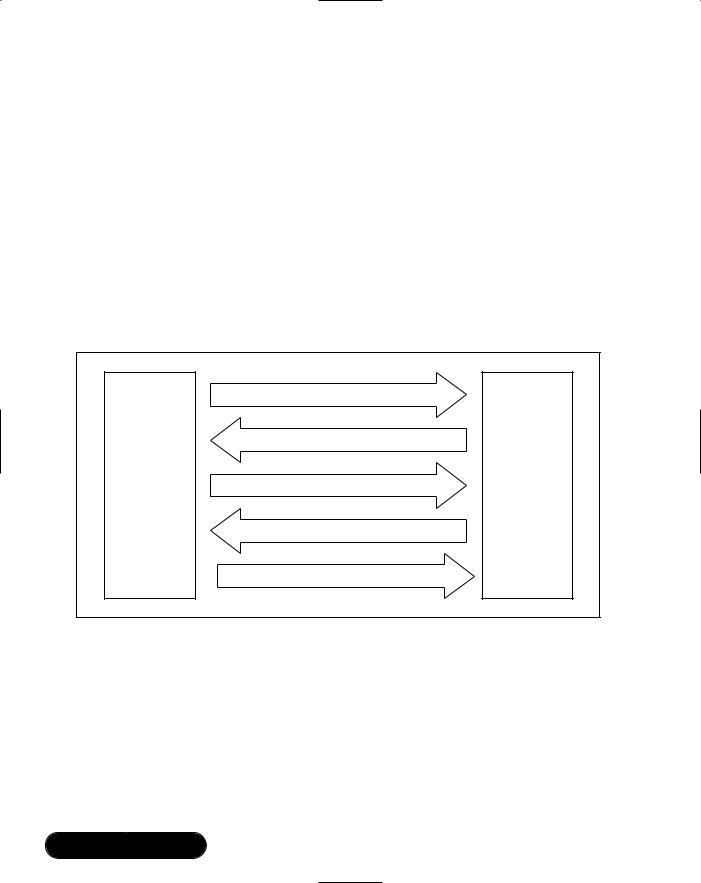
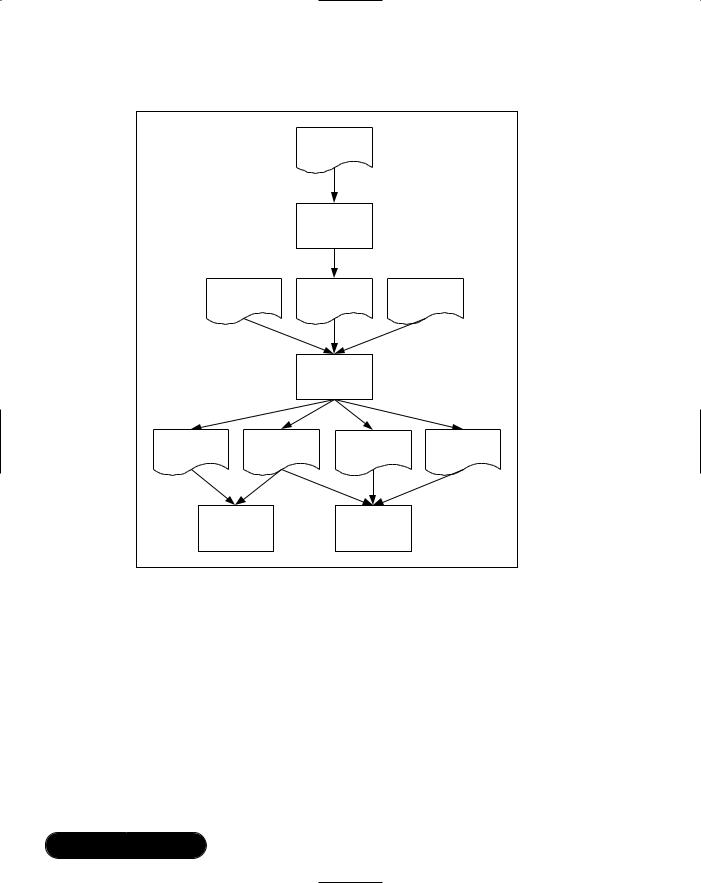
The main compiler xap-local-xap-gcc is derived from the GNU C compiler. This compiles the C code and produces an object file hello.o.The linker then works with the assembler xap2asm to analyze the object file, link in libraries and produce the application files hello.app, hello.dbg, hello.sym, and hello.xap. (See Figure 7.3.)
www.syngress.com
274 Chapter 7 • Embedding Bluetooth Applications
Figure 7.3 The BlueLab Tool Chain
|
|
hello.c |
|
|
|
gcc |
|
|
libc.a |
hello.o |
crt0.o |
|
|
ld |
|
hello.app |
hello.dbg |
hello.sym |
hello.xap |
|
chip / emulator |
debugger |
|
All you have done so far is build a “Hello World” program—this is not a BlueCore image, and you can’t download it to the Casira yet. But you can use it to play with the debugging tools.
Running an Application under the Debugger
The debugger allows you to set breakpoints as well as single-step your code, and has many of the functions you find in a typical modern debugging environment. Code executes on the PC, but if you need to use functions from the BlueCore chip, such as the Radio or PIO, these are handled by the attached Casira.
www.syngress.com
Embedding Bluetooth Applications • Chapter 7 |
275 |
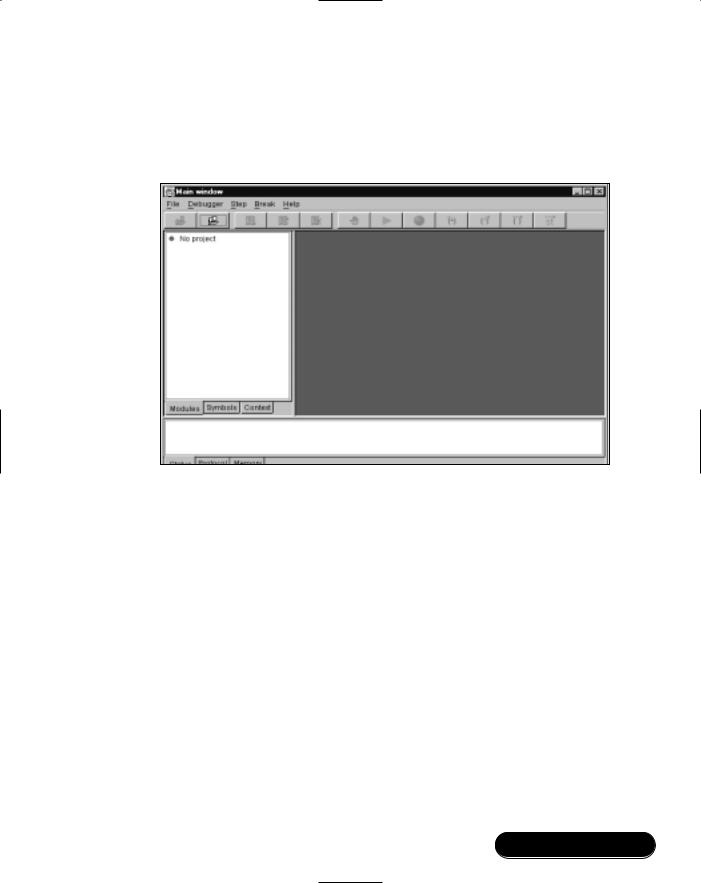
Start off appdebug.jar by double-clicking the appdebug.jar icon in the C:\BlueLab20\bin directory.You should see the debugger window as shown in Figure 7.4.
Figure 7.4 Debugger Main Window
Select File | Open project, and load hello.sym. Once the project has loaded, you can browse the application downloaded using the Modules and Symbols tabs. Click a module name to see that module. Right-click a symbol to see the different places it appears.
Without communications, the debugger will report a problem and will fail to start.You can modify the comm port settings on the chip using PSTool, and editing the UART: baud rate.The Host Interface must be BCSP.To adjust the PC baud rate to match the Casira, select File | Preferences and click the
Comms tab.
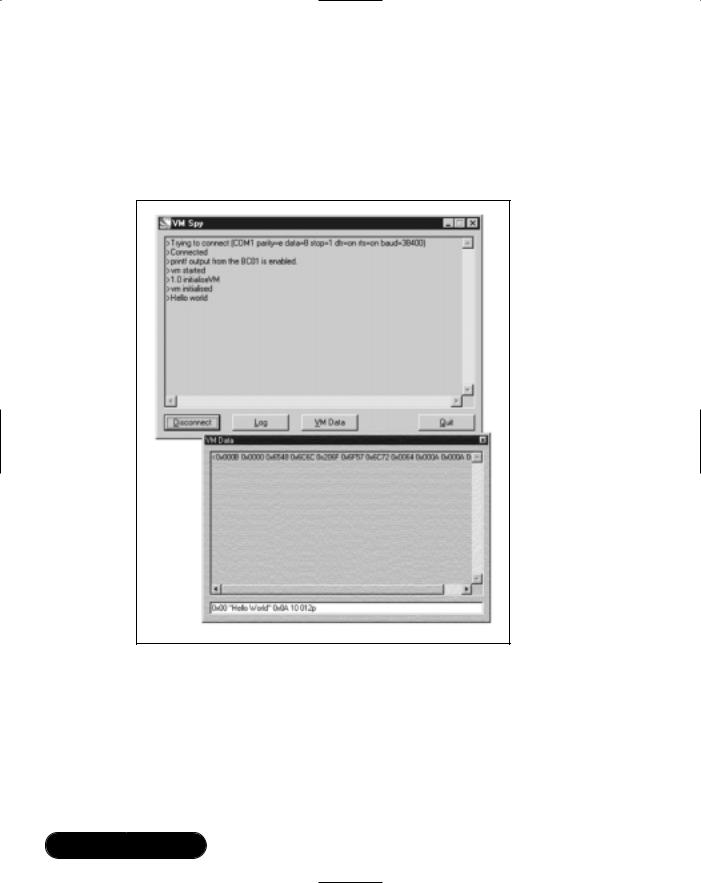
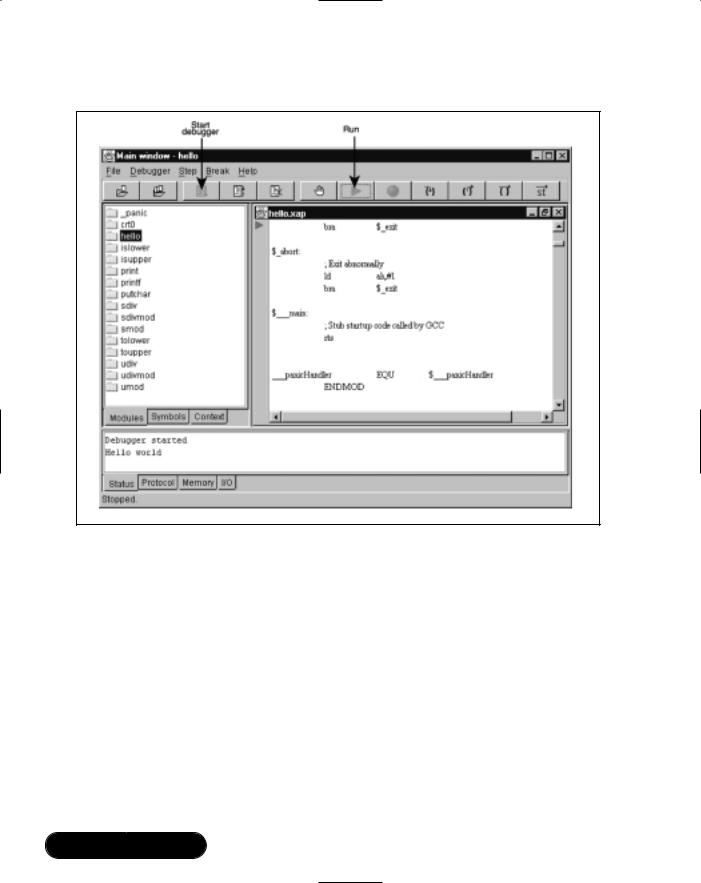
To run the program under the debugger, click the Start Debugger button. This opens communications to the Virtual Machine, lets you set break points, and allows you to run the code. Now, run the code by pressing the Run button.You should see “Hello World” in the debug output window (see Figure 7.5).
The Hello World program will run, output “Hello world,” and then exit. It’s not exactly a killer application, but it does verify that you have successfully installed all the tools, and configured the Casira correctly.
www.syngress.com
276 Chapter 7 • Embedding Bluetooth Applications
Figure 7.5 Active Debugger Window
Using Plug-ins
The debugger can simulate code running on a BlueCore chip, and by communicating with the Casira can also use the radio and PIO ports on the BlueCore itself. Embedded applications are likely to run on custom hardware, so it may also be necessary to simulate extra hardware. For example, if you are creating a headset, a plug-in to simulate the buttons and lights on your headset will make it much easier to debug your headset application.
Simulating custom hardware is done by adding plug-ins to the debugger.The debugger is written in Java, so to create a plug-in, you just derive a new class to extend the existing Java class JComponent. Custom hardware will be controlled by the BlueCore chip’s PIO pins, so plug-ins which simulate custom hardware must implement the PIOPlugin interface.
www.syngress.com
Embedding Bluetooth Applications • Chapter 7 |
277 |
BlueLab includes an abstract PIOPanel class, which extends Jcomponent, and implements the PIOPlugin interface. It also provides useful functions for constructing and registering controls.
The following example is based on PIOPanel.The class implements two functions: tabName, which returns a string giving the name of the panel as it appears within the debugger, and the constructor function, which creates items that are displayed within the panel, positions them in the correct place, and informs the underlying PIOPanel about them.The items added to the panel must all implement the “Updater” interface:
public interface Updater
{
void setEnabled(boolean show); void update(int on, int isout); void setDriver(PIODriver lis);
}
The updater interface specifies three functions that the control should support:
■setEnabled is called for each item in the panel whenever the panel becomes activated or deactivated. It is commonly used for graying out the controls.
■update is most useful for output items (lights).This interface function is called for each item in the panel whenever the PIO bits change state.
■PIODriver is used to drive PIO bits.This is needed to accept input from the user (e.g., a button press). An instance of “PIODriver” is passed to the item’s “setDriver” function when the item is added to the PIOPanel.
If the hardware being simulated is just simple buttons or lights, then these can be added much more easily.The PIOPanel class provides utility functions that produce labels, buttons, and lights that are integrated into the panel in the correct way.These functions are:
//produces a simple text label, that is enabled in the correct manner. public JLabel makeLabel(String label);
//produces a simple light, that is connected to one bit of the PIO port
www.syngress.com