

General electric VAT200
.pdfДля мощности инвертора (0.4 ~ 11 кВт )
10-0 |
B |
C |
0 / 9 |
7.5% |
7.5% |
1 / 10 |
10.0% |
7.5% |
2 / 11 |
15.0% |
7.5% |
3 / 12 |
20.0% |
7.5% |
4 / 13 |
17.5% |
7.5% |
5 / 14 |
25.0% |
7.5% |
6 / 15 |
15.0% |
7.5% |
7 / 16 |
20.0% |
7.5% |
8 / 17 |
25.0% |
7.5% |
3. На выходе инвертора будет напряжение B, C (см. параметр 10-0) плюс 10-1. При этом пусковой момент двигателя возрастает.
Напряж.
.
100
B 












10-0= |
|
|
C |
|
Гц |
|
|
|
1 |
2.5/3. |
50/6 |
Прим.: При 10-1=0, Установка начального момента не действует
4. Когда асинхронный двигатель вращается под нагрузкой , появляется скольжение. Необходимо компенсировать скольжение для повышения точности поддержания скорости.
|
Выходной ток -(10-2) |
|
|
|
Прим. : 0-02=номинальный ток |
|||
Комп. Скольжения = |
|
|
|
× (10-3) |
двигателя |
|||
|
|
|
||||||
(0-02)-(10-2) |
|
10-2= ток холостого хода |
||||||
|
|
|
|
|
||||
|
|
|
|
|
|
|
двигателя |
|
|
(Синхронная скорость двигателя – номинальная скорость) / |
|||||||
Грубая величина 10-3 =Синхронная скорость двигателя |
|
|
|
|
||||
Синхронная скорость двигателя |
120 |
|
X номинальная частота (50Гц или 60Гц) |
|||||
(об/мин)= |
|
Число полюсов |
||||||
Пример: . 4 полюса 50 Гц |
|
|
|
|
|
120 |
× 50=1500 об/мин |
|
Синхронная скорость двигателя |
|
|
|
4 |
||||
|
|
|
|
|||||
71
Прим.: Ток холостого хода двигателя (10-2) отличается с мощностью инвертора (15-0)
Группа параметров 11 - Работа PID регулятора
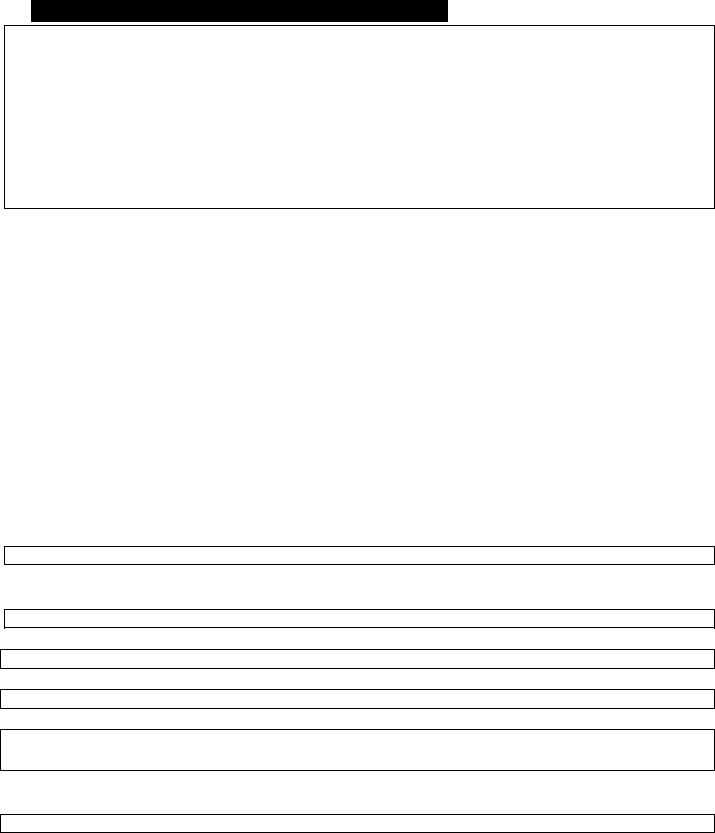
11-0 : Выбор алгоритма PID 0000: PID отключен
0001: PID включен (отклонение управляется D-регулятором) 0002: Обратная связь PID управляется D регулятором 0003: PID обратная характеристика D регулятора
0004: PID обратная связь характеристики D
0005: PID, частотная команда + D регулятор
0006: PID, частотная команда + обратная связь характеристики D
0007: PID, частотная команда + обратная характеристика D регулятора. 0008: PID, частотная команда + обратная связь характеристики D.
11-0 =1, D – отклонение (заданная величина –действительная величина) в единицу времени (11- 4).
=2, D отклонение действительной величины в единицу времени (11-4).
=3, D отклонение (заданная величина –действительная величина) в единицу времени (11-4). Если отклонение положительное, то выходная частота инвертора уменьшается, если отрицательное – увеличивается.
=4, D отклонение действительной величины в единицу времени (11-4). Если отклонение положительное, то выходная частота инвертора уменьшается, если отрицательное –
увеличивается.
=5, D отклонение (заданная величина –действительная величина) в единицу времени (11-4) + команда частоты.
=6, D отклонение действительной частоты в единицу времени + команда частоты.
=7, D отклонение (заданная величина –действительная величина) в единицу времени (11-4) + команда частоты. Если отклонение положительное, то выходная частота инвертора уменьшается, если отрицательное – увеличивается.
=8, D отклонение (заданная величина –действительная величина) в единицу времени (11-4) + команда частоты. Если отклонение положительное, то выходная частота инвертора увеличивается, если отрицательное – уменьшается
11-1 : Усиление обратной связи(%) : 0.00 - 10.00
11-1 Параметр усиления обратной связи. Отклонение = (заданная величина – действительная величина) × 11-1
11-2 : Пропорциональное усиление(%) : 0.0 - 10.0
11-2 : Пропорциональное усиление для P регулирования.
11-3: Время интегрирования(с) : 0.0 - 100.0
11-3 : Время интегрирования для I регулирования
11-4 : Время дифференцирования(s) : 0.00 - 10.00
11-4 : Время дифференцирования для D регулирования
11-5: PID регулирование : 0000 : положительное 0001 : отрицательное
11-6: смещение PID (%) : -109% ~ +109%
11-5/11-6: Действительное значение PID регулятора равно расчетному значению плюс 11-6 (знак 11-6 определяется параметром 11-5).
11-7 : Время задержки выходного фильтра (с) : 0.0 - 2.5
11-7 : Время задержки для выходной частоты.
Прим.: Функция PID применяется для регулирования и поддержания параметров (давления, температуры и т.д.). Примерный алгоритм приведен ниже:
72
|
|
|
|
|
5,6,7,8 |
|
|
|
|
|
|
0 |
PID Off |
Команда |
|
|
|
|
|
|
1,2,3,4 |
частоты |
|
Заданное значение с (1-06) + |
|
|
11-0 |
PID ON |
|||
|
|
|
|
|
|||
11-1 |
P(11-2) |
|
|
Реле |
|||
Действительное |
|
|
|
|
|||
|
_ |
|
|
|
(11-7) |
||
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
значение с |
|
|
|
|
|
Отклоне |
|
(TM2/AV2) |
1-3 |
|
I (11-3) |
Огранич |
(11-5) |
|
|
|
|
|
|
||||
D |
+ |
|
|
ит |
|
(11-6) |
|
|
|
|
|
|
|
|
|
+ |
2-4 |
|
D(11-4) |
|
|
|
|
(11-4) |
|
|
|
|
|
||
|
|
|
1-3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
(11-0) |
|
D (11-4) |
|
|
|
|
|
|
|
2- |
|
(11-0) |
|
|
|
|
|
|
|
|
||
1.Используя PID регулирование , назначьте AV2 на клеммнике TM2 как клемму для сигнала обратной связи PID, то есть:5-05=23.
2.Заданное значение на вышеприведенной диаграмме – входная частота с 1-06.
Группа параметров 12 - PID «Ограничение» и «Выход за пределы регулирования»
12-0 : Определение потери обратной связи: 0000: Выключено 0001: Включено – инвертор продолжает работать после потери обратной связи
0002: Включено – инвертор останавливается после потери обратной связи
12-0= 0 : Выключено; 12-0= 1 : Продолжает работать и индицирует на табло PDER; 12-0= 2 : останавливается и индицирует на табло PDER.
12-1: Определение потери обратной связи (%) : 0 - 100
12-1 – уровень для потери сигнала. Отклонение = Величина задания – Величина обратной связи. Когда отклонение больше уровня для потери сигнала, обратная связь считается потерянной.
12-2: Время задержки определения потери обратной связи (с):0.0 -25.5
12-2: Время задержки после того, как потерян сигнал обратной связи.
12-3: Ограничение интегрирования (%): 0 - 109
12-3 : Ограничитель при интегрировании PID.
12-4: Интегратор обнуляется, когда сигнал обратной связи равен заданному значению: 0000:Выключено 0001:1 секунда 0030: 30 секунд
12-4=0: При достижении сигналом обратной связи заданного значения, интегратор не обнуляется.
12-4=1~30 : При достижении сигналом обратной связи заданного значения, интегратор обнуляется за 1~30 секунд и инвертор останавливается. Инвертор начинает работать снова, если сигнал обратной связи отличается от заданного значения.
73
12-5 : Допустимая ошибка интегрирования (единицы) (1 единица = 1/8192): 0 - 100
12-5=0 ~ 100% Величина перезагружается после обнуления интегратора.
12-6 : Сигнал обратной связи PID : 0000: 0~10V 0001: 4~20mA
12-6: Выбор типа сигнала обратной связи, 12-6=0 : напряжение 0~10В; 12-6=1 : ток 4~20мA.
Группа параметров 13 - Связь с внешними устройствами
13-0 : Назначенный номер станции : 1 - 254
13-0: Установка номера станциикоторая управляет инвертором.
|
|
|
||
13-1 : Установка бода (bps) : |
0000: |
4800 |
||
|
|
0001: |
9600 |
|
|
|
0002: |
19200 |
|
|
|
0003: |
38400 |
|
|
|
|
|
|
13-2 |
: Выбор бита для стоп : |
0000: |
|
1 стоп бит |
|
|
0001: |
|
2 стоп бит |
|
|
|
|
|
13-3 |
: Выбор паритета |
0000 : |
|
нет паритета |
|
|
0001 : |
|
четный паритет |
|
|
0002 : |
|
нечетный паритет |
|
|
|
||
13-4 |
: Выбор формата данных : |
0000 : 8 бит |
||
|
|
|
0001 : 7 бит |
|
|
|
1. Протокол связи RS-485: |
||
(1)1 vs 1 управление : управляет одним инвертором посредством персонального компьютера или PLC контроллера, или обычного контроллера (установите 13-0 = 1~254)
(2)1 vs более 1управление : для контроля более одного инвертора посредством персонального компьютера или PLC контроллера (максимальное количество инверторов может быть 254. Установите 13-0 = 1~254), когда инвертор получит код связи = 0, управление разрешено, несмотря на значение 13-0.
2. Протокол связи RS-232: (Требуется интерфейс RS232)
1vs1 управление: управляет одним инвертором посредством персонального компьютера или PLC контроллера, или обычного контроллера (установите 13-0 = 1~254)
Прим.:
a.Значение бода (13-1) PC, PLC или контроллера и одного из инверторов должны быть установлены одинаковыми. Формат связи (13-2/13-3/13-4) должен быть установлен одинаковым.
b. Инвертор будет принимать назначенные параметры, если внешний PC будет изменять параметры инвертора.
c.Смотри протокол связи VAT200.
74
Группа параметров 14 - Автотестирование
14-0 : Сопротивление статора (Ом)
14-1 : Сопротивление ротора (Ом)
14-2 : Эквивалентная индуктивность (мГн)
14-3 : Ток намагничивания (А)
14-4 : Проводимость потерь в стали (1/Ом)
1.Если выбрано векторное управление 0-00=0 или 1, после включения питания , установите 0- 06=1, при начале самотестирования двигатель начнет вращаться. Когда двигатель остановится – самотестирование закончилось. Инвертор записывает параметры двигателя 14-0~ 14-4, и перезаписывает значение 0-06 как 0.
2.Автотестирование должно проводиться после замены двигателя. Если параметры двигателя 14- 0~14-4 уже известны, можно ввести их вручную.
3. 0-06=1 – для разрешения автотестирования, после окончания процесса автотестирования , |
0- |
06 = 0, и на пульте управления светится END. |
|
Группа параметров 15 – Статус инвертора и перезагрузка параметров
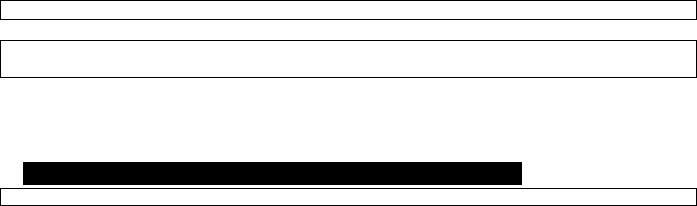
15-0 : Код инвертора
15-0 |
Модель инвертора |
2P5 |
U20_N00K4 |
201 |
U20_N00K7 |
202 |
U20_N01K5 |
203 |
U20_N02K2 |
205 |
U20_N04K0 |
208 |
U20_N05K5 |
210 |
U20_N07K5 |
15-0 |
Модель инвертора |
401 |
U203X00K7 |
402 |
U203X01K5 |
403 |
U203X02K2 |
405 |
U203X04K0 |
408 |
U203X05K5 |
410 |
U203X07K5 |
415 |
U203X11K0 |
15-1: Версия программного обеспечения
15-2 : Аварийные ситуации (Последние 3)
1.В случае, если инвертор работает не нормально, последние аварийные ситуации могут быть загружены из 2.xxxx , 3.xxxx, и из1.xxxx и 2.xxxx. Текущая аварийная ситуация может быть загружена из 1.xxxx. То есть 3.xxxx – самая ранняя аварийная ситуация из трех , а 1.xxxx – последняя.
2.Введите 15-2, первой будет индицироваться авария 1.xxxx, нажмите▲, вы сможете прочитать 2.xxx→3.xxx→1.xxx, нажимая▼, сможете прочитать 3.xxx→2.xxx→1.xxx→3.xxx.
3.Введите 15-2, при нажатии кнопки «reset» последние аварийные ситуации стираются.
4.То есть если индицируется ‘1.OCC’ это значит что последняя аварийная ситуация была OC-C (перегрузка на фиксированной скорости), и т.д..
15-3 : Общее время работы 1 (часы): 0 – 9999 15-4 : Общее время работы 2 (часы X 10000): 0 - 27
15-5 : Вид общего времени работы: 0000: При подаче питания 0001: Работа двигателя
1.Когда время работы 9999 продолжительность =1. Следующий час обнуляет значение 9999 и устанавливает продолжительность=2.
2.Описание выбора времени:
75
Заданное Описание значение
0 Включение питания, начинается счет времени.
1 Включение двигателя, начинается счет времени.
15-6 : Перезагрузка к заводским значениям:1110: Перезагрузка к заводским параметрам 50Гц 1111: Перезагрузка к заводским параметрам 60Гц 1112: Очистка программы PLC
Если 15-6 установлен 1111 или 1110, параметры инвертора устанавливаются как первоначальные (заводские) 50 или 60 Гц.
Внимание! При перезагрузке будут утеряны все параметры двигателя и программы PLC.
4.5 Описание работы встроенного программируемого логического контроллера (PLC).
Особенностью преобразователя частоты VAT200 является наличие встроенного PLC, потребитель может легко создавать программы лестничного типа для вспомогательных систем автоматики на персональном компьютере (на основе Windows) и записывать их в инвертор через СОМ порт и шнур с конвертором 232/485, что позволяет в ряде случаев отказаться от использования дополнительных контроллеров, тем самым упростив монтаж и сэкономив значительные средства..
4.5.1 Инструкции базовых блоков
|
|
|
|
Ù |
|
Ú |
P |
|
|
|
|
NO / NC |
|
|
|
|
|
|
|
|
|
|
|
|
|
Входные команды |
|
|
|
|
|
|
I |
|
|
|
I1~I7 / i1~i7 |
|
|
Выходные команды |
Q |
|
Q |
|
Q |
Q |
Q |
|
q |
|
Q1~Q2 / q1~q2 |
|
Вспомогательные блоки |
M |
|
M |
|
M |
M |
M |
|
m |
|
M1~MF / m1~mF |
|
Специальные регистры |
|
|
|
|
|
|
|
|
|
|
V1~V7 |
|
Счетчики |
C |
|
|
|
|
|
C |
|
c |
|
C1~C4 / c1~c4 |
|
Таймеры |
T |
|
|
|
|
|
T |
|
t |
|
T1~T8 / t1~t8 |
|
Аналоговые компараторы |
G |
|
|
|
|
|
G |
|
g |
|
G1~G4 / g1~g4 |
|
Энкодеры |
H |
|
|
|
|
|
H |
|
h |
|
H1~H4 / h1~h4 |
|
Блоки управления |
F |
|
|
|
|
|
F |
|
f |
|
F1~F8 / f1~f8 |
|
инвертором |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Описание специальных регистров |
||||||||||
V1: Заданная частота |
|
Диапазон: 0.1~650.0 Гц |
|
|
|
|||||||
V2: Рабочая частота |
|
Диапазон: 0.1~650.0 Гц |
|
|
|
|||||||
V3: Входной сигнал AIN |
|
|
|
Диапазон : 0~1000 |
|
|
|
|||||
V4: Входная величина S6 |
|
|
|
Диапазон : 0~1000 |
|
|
|
|||||
V5: Входная величина с пультаVR |
|
|
Диапазон : 0~1000 |
|
|
|
||||||
V6: Рабочий ток |
|
Диапазон : 0.1~999.9A |
|
|
|
|||||||
V7: Момент |
|
|
|
Диапазон : 0.1~200.0% |
|
|
|
|||||
|
Верхний |
Нижний |
Другие символы |
|
дифференциал |
дифференциал |
|
Дифференциал |
D |
d |
|
76
Загрузка |
|
|
|
|
Ù |
Перезагрузка |
|
|
|
|
Ú |
Действие типа |
P |
|
|
|
P |
Instruction |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Разомкнутая |
цепь |
“ ” |
|
|
|
(Вкл.) |
|
|
|
|
|
Замкнутая |
цепь |
“—” |
|
||
(Выкл.) |
|
|
|
|
|
|
|
|
|
||
Символы |
|
|
Описание |
||
соединения |
|
|
|
|
|
─Соединение левых и правых элементов
┴Соединение левых, правых и верхних элементов
┼Соединение левых, правых, верхних и нижних элементов
┬Соединение левых, правых, и нижних элементов
4.5.2Описание работы базовых блоков (Вкл.=ON; Выкл=OFF)
Функция команды D (d)
Пример 1: I1─D ──[ Q1
|
OFF |
|
OFF |
I1 |
ON |
D |
OFF |
ON |
|
OFF |
|
|
Один |
полный |
период |
Q1 |
OFF |
сканирования |
OFF |
|
ON |
|
|||
|
Пример 2: i1─d ──[Q1 |
|
||
I1 |
OFF |
ON |
|
OFF |
I1 – обратный сигнал i1. |
OFF |
|
|
|
i1 |
ON |
|
ON |
|
d1 |
OFF |
ON |
|
OFF |
|
|
Один полный период сканирования |
||
Q1 |
OFF |
ON |
|
OFF |
Нормальный выход ( - [ )
I1 ── [Q1
|
|
OFF |
|
OFF |
|
I1 |
|
ON |
|||
|
OFF |
|
|
OFF |
|
Q1 |
|
ON |
|||
Загрузка выхода (Ù)
77
I1 ── ÙQ1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
OFF |
|
|
|
|
|
|
|
|
OFF |
|||||||
|
|
I1 |
|
|
|
|
|
|
|
ON |
|
|
|
|
|||||||||
|
|
|
|
|
|
OFF |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ON |
||||||
Перезагрузка выхода (Ú) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
I1 ── ÚQ1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
OFF |
|
|
|
|
|
|
|
OFF |
|
||||||
|
|
I1 |
|
|
|
|
|
|
ON |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
OFF |
||||||
|
|
Q1 |
|
|
|
ON |
|
|
|
|
|
|
|
|
|
|
|||||||
P выход |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i1 ──PQ1 |
|
|
|
|
|
OFF |
|
|
|
OFF |
|
|
|
OFF |
|
|
|
|
|
|
|||
|
|
I1 |
|
|
|
ON |
|
ON |
ON OFF |
||||||||||||||
|
|
I1-обратный |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
сигнал i1. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
Q1 |
|
|
ON |
|
|
|
OFF |
|
|
|
ON |
|
|
|
OFF |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4.5.3 Инструкция применения блоков |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Счетчик |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
Символ |
|
Описание |
|
|
|
|
|
|
|||||
|
|
1 |
|
|
|
|
|
|
|
|
|
Счетный алгоритм (1-4) |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
Используйте (I1 ~ f8) чтобы установить счет |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
“вверх” или счет “вниз” |
|
|||||||
2 |
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
Выкл.: счет вверх (0, 1, 2, 3, 4….) |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вкл.: счет вниз ( ….3, 2, 1, 0) |
|
|||||||
|
|
5 |
|
6 |
|
|
|
|
|
Используйте (I1 ~ f8) для перезагрузки |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
счетной величины |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вкл: счетчик обнуляется и выключается |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( OFF) |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Выкл.: счетчик продолжает считать |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
Задание счетного значения (начального) |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Заданное (Установленное) значение |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Номер счетчика (C1 ~ C4 всегоl: 4 ). |
|
||||||||||
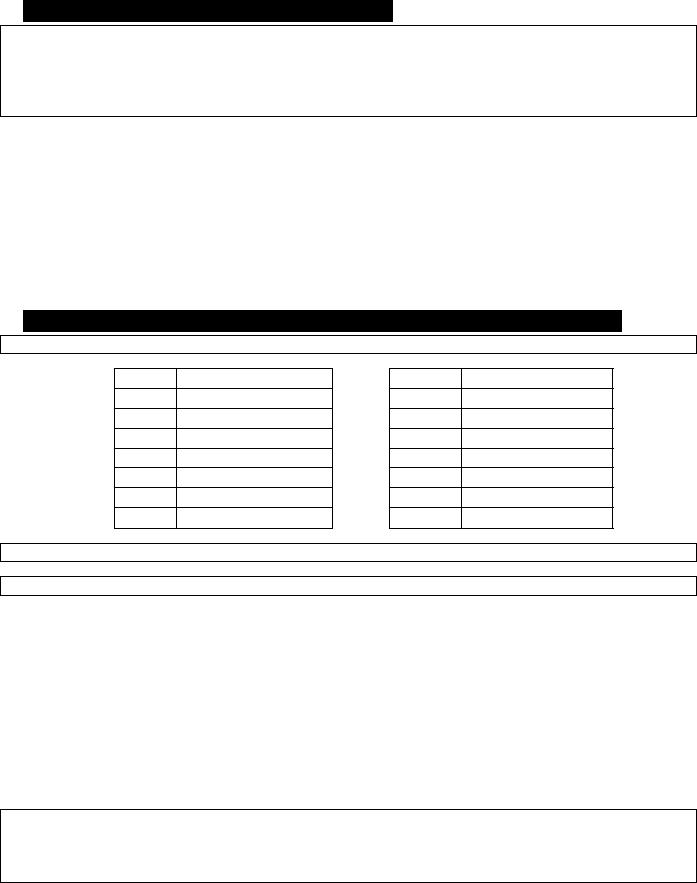
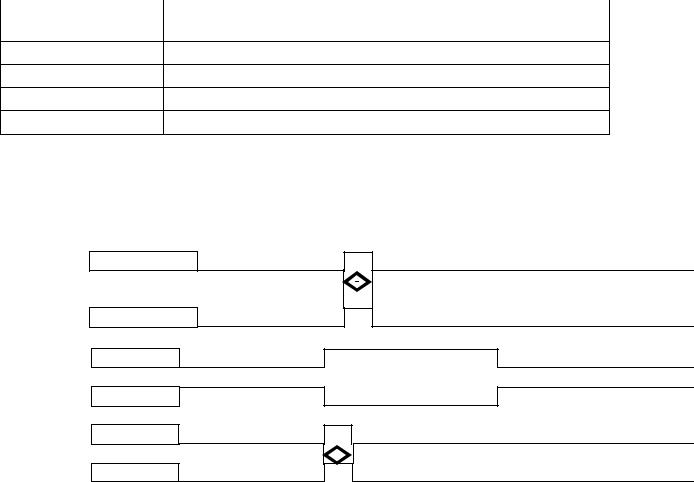
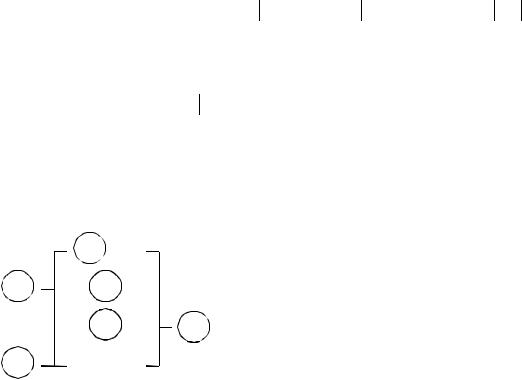
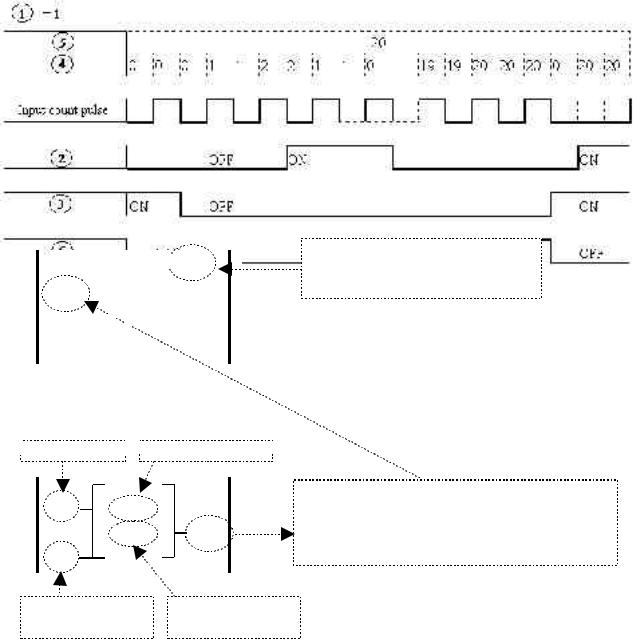
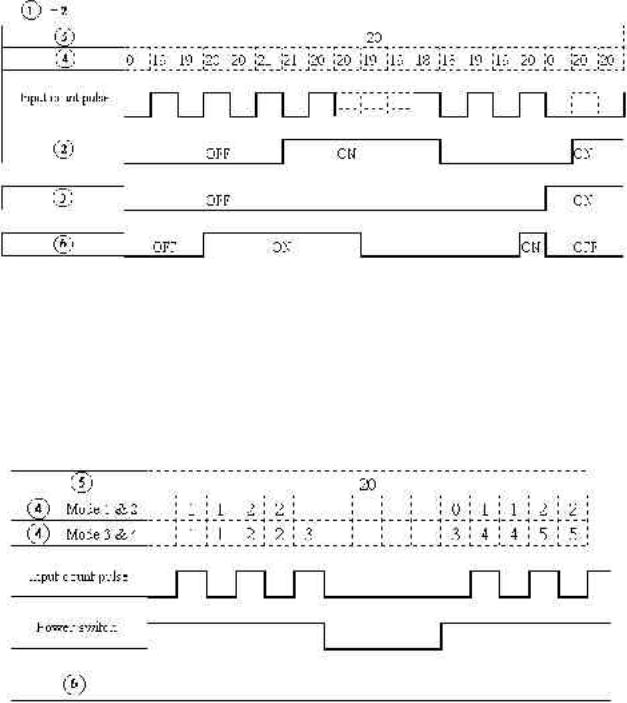
(1) Алгоритм счетчика 1
78
Прим
Вход по лестничной диаграмме
I1 ─ i2 ─ -- ─  C3 C3 ─ -- ─ -- ─ Q1
C3 C3 ─ -- ─ -- ─ Q1
m1 ┬ -- ─
─ q1 ─ M2
q1 ─ M2
M2 ┴
Вкл./Выкл. счетных импульсов счетчика C3 управляются I1 и i2.
Входы функционального блока
 Счет вверх/вниз
Счет вверх/вниз
 Текущая величина
Текущая величина 
|
1 |
|
Когда заданное значение достигнуто, C3 =Вкл.. |
M2 |
0000 |
|
|
0020 |
|
Входная точка C3 на лестничной диаграмме |
|
|
C3 |
||
|
|
должна быть Вкл.. |
|
I3 |
|
|
|
Если I3 Вкл. – |
|
Заданное значение |
|
счетчик обнуляется |
счетчика |
|
|
2)Алгоритм счетчика 2
79
При
При |
личие |
от а
(2)Алгоритм счетчика 3 подобен алгоритму 1 за исключением того, что при пропадании питания счетчик запоминает текущее счетное значение и при появлении питания начинает работу с этого значения.
(3)Алгоритм счетчика 4 подобен алгоритму 2 за исключением того, что при пропадании питания счетчик запоминает текущее счетное значение и при появлении питания начинает работу с этого значения.
Таймер
80