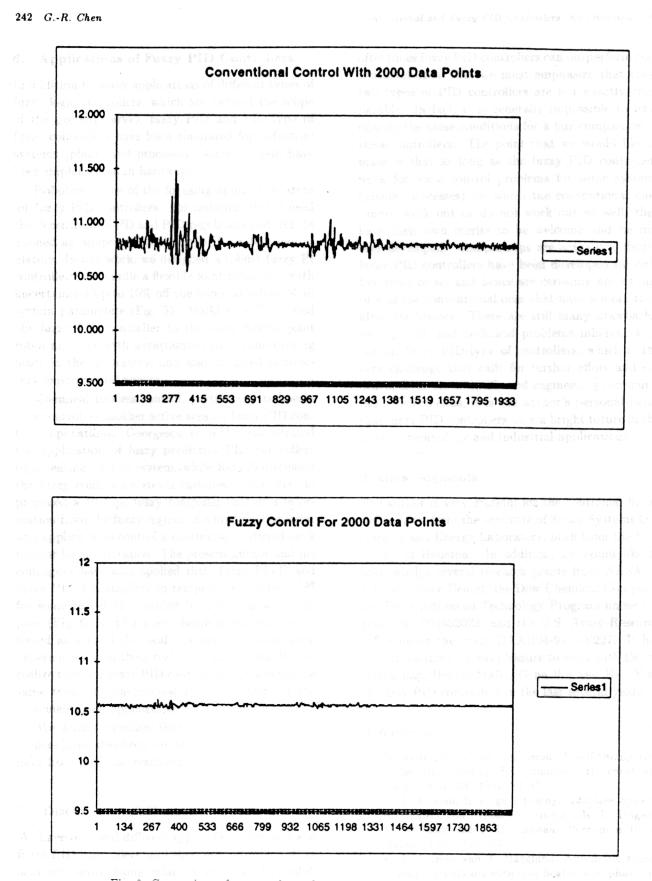
Chen G.R.Fuzzy PID controllers for industrial applications
.pdfIntroduction to Fuzzy PID Controllers
A. Discretization of Convetional PID Controllers
First, digitize the conventional analog PID controllers by
2 z −1
S = T z +1
where T > 0 is the sampling time. For the PI controller:
u(nT) = u(nT–T) + T u(nT)
~ |
~ |
|
|
KI |
|
||
u(nT) = KP v(nT) + |
|
e(nT) |
|
T |
|||
|
|
e(nT) |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
KI |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
+ |
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
u(nT) |
|
|
+ |
|
|
|
u(nT) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
z−1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
− |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
+ |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z−1 |
|
|
|
|
|
|
|
1 |
|
v(nT) |
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K P |
|
|
|
|
|
|
u(nT−T) |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
T
Figure 8. The digital PI controller
Similarly, for the PD controller:
u(nT) = |
~ |
~ |
KP d(nT) + |
K D v(nT) |
where
e(nT ) + e(nT − T )
d(nT) =
T
e(nT ) − e(nT − T )
v(nT) =
T
1
+T
+
z−1
e(nT)
z−1
+
− 1
T
d(nT) ~ K P
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
u(nT) |
|
|
+ |
|
|
|
|
u(nT) |
||||||
|
|
|
|
|
|
|
||||||||||
|
T |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
||||||||||
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
z−1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
u(nT−T)
v(nT) ~ KD
Figure 9. The digital PD controller
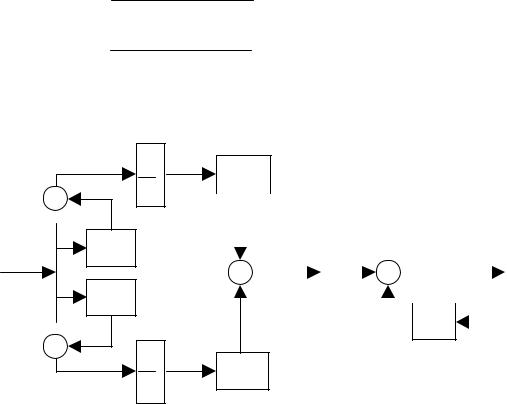
B. Example: Designing the Fuzzy PI Controller
r(nT) e(nT) |
|
|
1 |
|
d(nT) |
|
Ki |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
- |
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
+ u(nT) |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
KuPI |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fuzzy PI |
|
Process |
y(nT) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
-1 |
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
+ |
|
|
|
|
z |
|
|
|
|
|
|
Controller |
|
|
|
|
- |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Kp |
|
|
|
|
|
|
|
|
z-1 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
ev(nT |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Figure 10. The Fuzzy PI control system
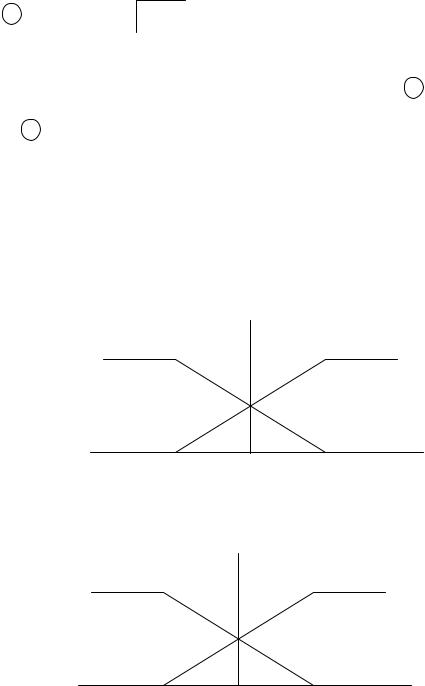
Fuzzification and Defuzzification fuzzy membership functions
negative |
1 |
|
positive |
|
|
|
|
|
|
0.5 |
|
-L |
0 |
L |
uPI (nT ) |
Figure 11. Output membership functions
negative |
1 |
|
positive |
|
|
|
|
|
|
0.5 |
|
-L |
0 |
L |
ep, ev |
Figure 12. Input membership functions
|
|
K p ev (nT ) |
|
IC18 |
IC12 |
L IC11 |
IC17 |
IC13 |
IC4 |
IC3 |
IC10 |
|
|
||
|
IC5 |
IC2 |
Ki d (nT ) |
-L |
|
|
L |
IC14 |
IC6 |
IC1 |
IC9 |
|
|
||
|
IC7 |
IC8 |
|
|
-L |
|
|
IC19 |
IC15 |
IC16 |
IC20 |
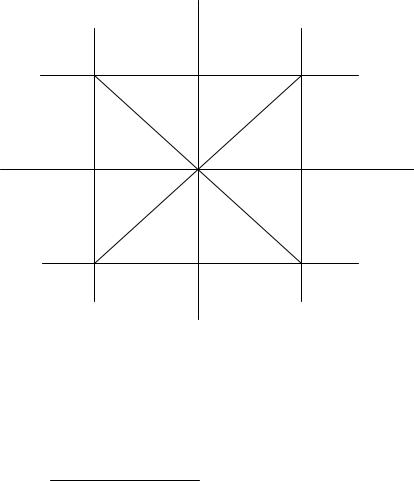
Figure 13. IC regions for the fuzzy PI controller
uPI (nT ) = |
L[K i d (nT ) + K p ev |
(nT )] |
, |
|||||||
2(2 L − K i |
|
d (nT ) |
|
) |
|
|||||
|
|
|
||||||||
|
|
|
|
|
||||||
= |
L[K i d (nT ) + |
|
K p ev ( |
|
nT )] |
, |
||||
( |
|
ev (nT ) |
|
) |
|
|||||
|
|
|
||||||||
|
2 2L − K p |
|
|
|
|
|
||||
= |
|
1 |
[ |
] |
, |
|
|
|
|
||||||
2 |
L + K p ev (nT) |
|
|||||
|
|
|
|
|
|||
= |
|
1 |
[L + K i d (nT )], |
|
|
||
2 |
|
|
|||||
|
|
|
|
|
|||
= |
|
1 |
[ |
|
|
], |
|
|
|
|
|||||
|
2 |
− L + K pev (nT) |
|
||||
|
|
|
|
|
|||
= |
|
1 |
[− L + K i d (nT )], |
||||
2 |
|||||||
|
|
|
|
|
|||
= |
0, |
|
|
|
|||
= |
− L , |
|
|
|
|||
= |
|
L , |
|
|
|
||
in IC1, IC2, IC5, IC6
in IC3, IC4, IC7, IC8
in IC9, IC10
in IC11, IC12
in IC13, IC14
in IC15, IC16
in IC18, IC20
in IC17
in IC19
Note: Rigorous stability can be guaranteed

Some Successful Examples of Applications
There are many successful examples of fuzzy PID controllers.
1. Robotics
* Six-legged Insect Robot
(Dr. P. Sooraksa, G. R. Chen, and students)
King Mongkut’s Institute of Technology, Bangkok, Thailand
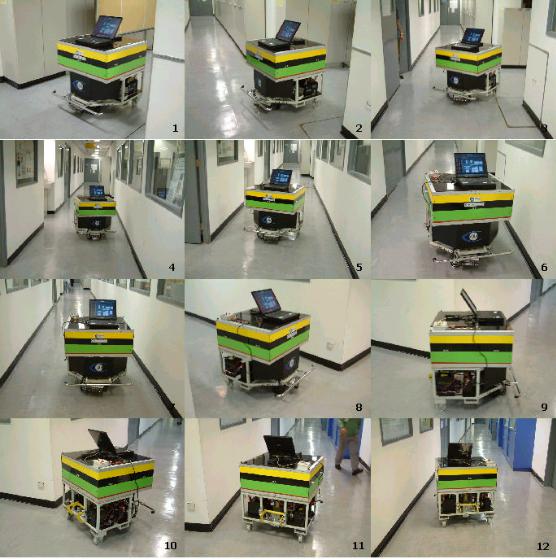
* Multi-purpose Autonomous Robust Carrier for Hospitals (MARCH)
(Dr. P. Sooraska, Prof. S. K. Tso, Dr. B. L. Luk, G. R. Chen, and students)
Centre for Intelligent Design, Automation and Manufacturing City University of Hong Kong
*Uncertain Robot-Arm Control
(next page)
(G. R. Chen and students) University of Houston, Texas, USA
*Uncertain Double-Pendulum Control
(DEMO)
(Prof. Edgar Sanchez, G. R. Chen, and students) CINVESTAV, Mexico
2.Temperature Control
(next page)
(G. R. Chen and students) University of Houston, Texas, USA
Other Application Examples
A.Process Control (temperature, flow rate, injection)
B.Vehicles Control (parking, docking, backing truck-trailers)
C.Electronic Appliances (washer, dryer, camcorder-camera)
D.Life-Support Systems (space shuttle, submarine)
E.… … many more … …

Fig. 8. Block diagram and physical setup for the robot arm experiment.
376 |
IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 5, NO. 3, MAY 1997 |
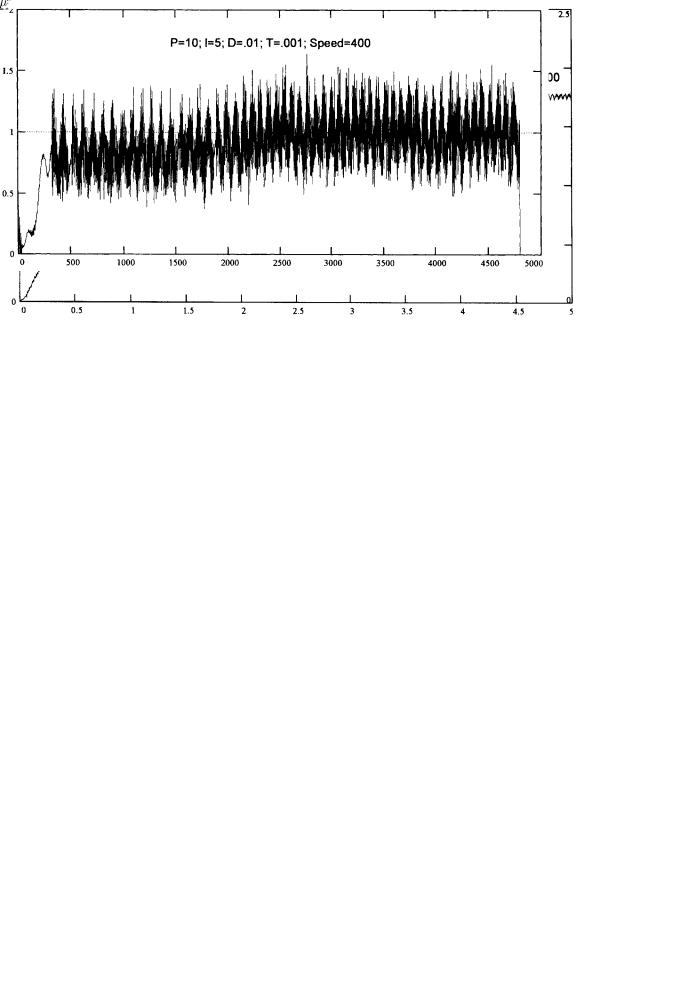
Fig. 10. Tracking performance of the fuzzy PID-controlled system (I).
Fig. 11. Tracking performance of the conventional PID-controlled system (II).