

10.1.2. Преобразования Лоренца
Преобразования координат и времени при переходе от одной ИСО к другой в СТО называют преобразованиями Лоренца. Классический закон преобразование скоростей по Галилею (*) противоречит постулату о постоянстве скорости света. Действительно, при V0=c закон Галилея дает для скорости света в неподвижной системе отсчета значение равное 2с. Очевидно, что при скоростях, сравнимых со скоростью света, преобразования Галилея не применимы и должны быть заменены другими. Свойства однородности и изотропности пространства требуют, чтобы эти преобразования были линейными.
Будем искать закон преобразования координат х и времени t при переходе от неподвижной системы отсчета К к подвижной К в виде линейной комбинации x и t:
здесь
коэффициенты
![]() зависят от скоростиV0
относительного движения систем отсчета
К и К.
зависят от скоростиV0
относительного движения систем отсчета
К и К.
Пусть в начальный момент времени начала координат 0 и 0 обеих СО совпадают (см. рис. 10.3). В момент времени t=t=0 из точки 0 (0) вдоль осей x и x испущен световой сигнал. За время t, (t) он достигнет некоторой точки Р с координатами
![]() .
.
Подставим соотношения (10.3) в (10.2) и умножим второе из них на с:
 .
.
Из (10.4) следует
![]() .
.
|
|
Рис. 10.3. Неподвижная (x,y,z,o) и подвижная (x,y,z,o) системы отсчета |

Если световой сигнал в начальный момент времени был направлен против осей x и х, то координаты точки P, до которой дойдет сигнал спустя время t (t) будут равны:
![]() .
.
Подставим (10.6) в (10.2) и умножив второе уравнение на с получим:
 .
.
![]() .
.
Складывая и вычитая (10.5) и (10.8), получим:
![]() .
.
Точка Оначала координат системы Кв системе К имеет координату x=V0t, а в системе Кона равна нулю (x=0), подставляя эти значения в (10.2) имеем:
Из последних соотношений следует
![]() .
.
Учитывая, что 11=22имеем
![]() .
.
Подставляя полученное выражение в (10.11), получим:
![]() .
.
Используя соотношения (10.9) – (10.13), перепишем формулу (10.2) следующим образом:
 .
.
Используя очевидные равенства:
![]() ,
,
можно записать
![]() .
.
Выразим xиtчерезxиt, и используя соотношения (10.14) запишем:
![]() =
=
![]() =
=![]() .
.
По теореме о тождественно равных многочленах, запишем равенство коэффициентов при соответствующих переменных:
 .
.
Отсюда получаем:
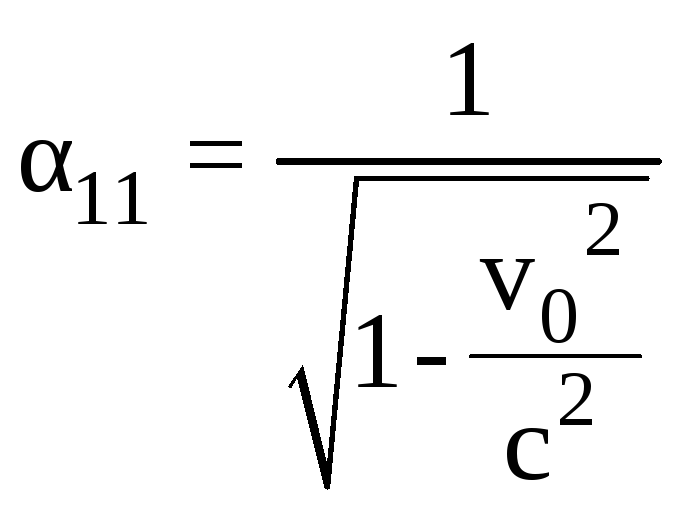 .
.
Для удобства записи формул СТО отношение V0/cобозначают через, с учетом этого соотношение (10.16) можно записывать так:
![]() .
.
Подставив (10.16) в (10.14), получим формулы преобразований для координаты xи времениt:

Соотношения (10.17) – есть искомые преобразования Лоренца для координат и времени.
Легко заметить, что при малых скоростях, V0<<c, соотношения (10.17) переходят в известные соотношения Галилея (2.4) для преобразования координат и времени:

С формальной точки зрения соотношения (10.17) имеют смысл при обязательном условии, что подкоренное выражение больше нуля. Отсюда следует, что скорость V0не может превышать и даже равняться скорости света.
Инвариантность интервала
Предположим, что в инерциальной системе отсчета К (x1, y1, z1, сt1) – координаты первого события, x2, y2, z2, сt2 – координаты второго события, величина
![]()
называется интервалом между этими событиями.
Обозначив расстояние между точками, в которых происходит событие через L12, а длительность события t12=t2–t1, получим для интервала
![]() .
.
Легко показать, что интервал – инвариантная величина, то есть его величина во всех инерциальных системах отсчета одна и та же. Для доказательства запишем интервал s12 в системе К и s12 в системе К:
 .
.
Воспользуемся формулами (10.18), запишем:
 .
.
Для интервала (s)2 имеем:

Числитель полученного выражения преобразуем отдельно:
![]()
![]() .
.
Возвращаясь к предыдущему соотношению, получим:
![]() Таким
образом, интервал s
– инвариант при переходе от одной ИСО
к другой.
Таким
образом, интервал s
– инвариант при переходе от одной ИСО
к другой.