

Моделирование систем Цифровой Обработки Сигналов в среде LabVIEW
Круглов Евгений Владимирович, аспирант МИФИ Решетов Владимир Николаевич, к.ф.-м. н. доцент МИФИ.
Москва 2008

LabVIEW Control Design and Simulation
•Введение в разработку управляющих систем
•Системы идентификации
•Разработка динамических систем
•Моделирование
•Создание прототипа
•Управление двигателем
Приложения
Control used to manufacture |
Control embedded in |
product |
product |
Control

Разработка управляющих систем на
базе моделей
• Задачи
–Повышение гибкости управления
–Увеличение производительности
•Инструменты
–Системы сбора данных
–Программы для
–Real-time hardware

Управляющие системы на основе
моделирования
System
Specification
Design &
Simulation
Rapid
Prototyping
Code
Generation
Field Test
Calibration &
Functional Test
System
Test (HIL)
Software
Test

Управляющие системы на основе моделей
System ID
Acquire I/O data from plant
Identify plant structure and coefficients
Analyze open-loop characteristics of plant
Control
Analysis
and Design
Simulation
Select controller structure and coefficients (gain)
Analyze closed-loop characteristics of controlled plant
Simulate offline controller and linear plant model
Simulate offline controller and nonlinear plant model
Prototype control algorithm with real-world dynamics
Real-Time
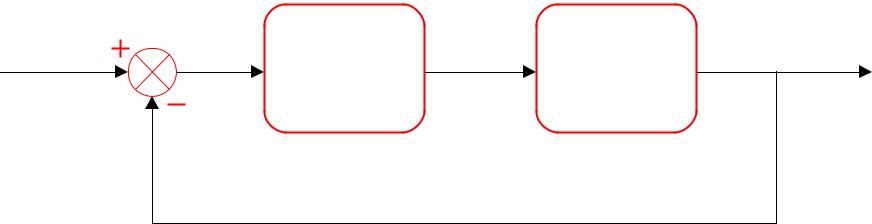
Архитектура управления и разработки
Speed |
Error |
Kc |
Motor |
Kp |
Actual |
Setpoint |
Voltage |
Speed |
Controller Plant
•Option A. Математическая модель
•Option B. Идентификация систем

Модель двигателя постоянного тока
Ri(t) V (t) K d (t) |
|
|
J |
d (t) |
Ki(t) |
||||||
|
|
dt |
|
|
|
|
|
dt |
|
|
|
|
J |
d (t) |
|
K |
V (t) |
K 2 |
(t) |
|
|
||
|
dt |
R |
R |
|
|
||||||
|
|
|
|
|
|
|
|
||||
Laplace transform: |
JRs (s) KV (s) K 2 (s) |
||||||||||
|
Угловая ск. |
|
(s) |
|
K |
||||||
H(s) = |
|
|
V (s) |
|
|||||||
Входное нап. |
|
JRs K 2 |
|||||||||

Система идентификации двигателя
постоянного тока
•DC Motor System
–Ввод: Управление двигателем (12V, PWM)
–Выход: квадратудный энкодер (5V, digital)
•500 Counts per Revolution
Motor
DO Command
DI |
Quad Encoder |
|
|
|
|
Идентификация модели
•System Identification Toolkit
–Симулирование и измерение отклика
–Идентификация
коэффициентов
|
LabVIEW System ID Toolkit |
||
LabVIEW System |
Signals |
System ID |
DC Motor |
ID Toolkit |
|
Algorithms |
Model |
Stimulus |
|
|
|
|
|
|
|
|
DO |
Motor Command |
|
|
|
cRIO |
|
|
|
|
|
|
|
|
|
|
|
|
|
Hardware |
|
DI |
Quad Encoder |
|
|
|
|
Response