

3.7. Пример структурной схемы электропривода лифта
Схему системы управления одиночным лифтом в режиме нормальной работы можно представить в виде (рис. 52).

Рис. 52
В схеме приняты следующие обозначения:
ПЛ – привод лифта;
ПД – привод дверей;
ПВП – посты вызовов и приказов;
УРПВ – узел регистрации приказов и вызовов;
УВНД – узел выбора направления движения;
УОПК – узел определения положения кабины;
УЗО – узел замедления и остановки;
ДПД – датчик положения дверей;
ДСЛ – датчик состояния лифта;
УБЗ – узел блокировки и защиты;
УВВ – узел выдержки времени;
УОЗД – узел закрывания и открывание дверей;
ПСУ – позиционно - согласующее устройство;
СВ – сигнал движения вверх;
СН – сигнал движения вниз;
СБ – сигнал большой скорости;
СМ – сигнал малой скорости;
СЗД – сигнал закрывания дверей;
СОД – сигнал открывания дверей;
СВВ – сигнал выдержки времени;
СВП – сигнал о вызовах и приказах;
СНПК – сигнал о наличие пассажира в кабине;
УОЗК – узел определения загрузки кабины;
СПЗК – сигнал о полной загрузке кабины;
СПГК – сигнал о перегрузке кабины;
СРРЛ – сигнал регулирования разгона лифта;
СПК – сигнал положения кабины.
В качестве примера рассматривается структурная схема высокоскоростного лифта, разработанная фирмой АЭГ (рис. 53).
Безредукторная подъемная лебедка приводится в движение двигателем Д, получающим питание от индивидуального генератора Г. Для управления полем генератора применен реверсивный тиристорный возбудитель ТВ. Схема управления является двухконтурной. Внутренний контур содержит регулятор тока РТ, на входе которого в каждый момент времени сравнивается заданный ток с действительным, причем максимальное значение тока ограничивается формой характеристики регулятора скорости. На входе регулятора скорости РС сравнивается заданная скорость с действительной и при автоматическом управлении вводится дополнительный сигнал коррекции по пройденному пути. При ручном управлении и ревизии заданное значение скорости формируется задатчиком интенсивности ЗИ.

Рис. 53. Схема высокоскоростного лифта
В
автоматическом режиме управление
электропривода производится с помощью
цифровой ЭВМ, с выхода которой выдаются
кодированные значения заданной скорости
![]() и путевой
ошибки
и путевой
ошибки
![]() ,
которые после преобразования в аналоговые
величины подаются на вход регулятора
скорости.
,
которые после преобразования в аналоговые
величины подаются на вход регулятора
скорости.
На
рис. 54 показано формирование заданной
кривой скорости
![]() вычислительной машиной. При наладке
устанавливаются кодированные максимально
допустимые значения
вычислительной машиной. При наладке
устанавливаются кодированные максимально
допустимые значения![]() ,
,![]() и
и![]() .
Поэтому при получении команды «Пуск»
на базе этих величин машина вычисляет
заданные значения скорости, осуществляет
операции интегрирования в соответствии
с графиком рис. 54.
.
Поэтому при получении команды «Пуск»
на базе этих величин машина вычисляет
заданные значения скорости, осуществляет
операции интегрирования в соответствии
с графиком рис. 54.
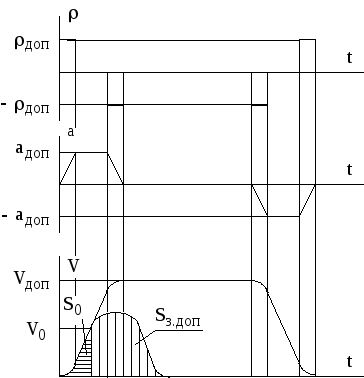
Рис. 54
ЭВМ в каждый момент задает нужное значение скорости. Интегрированием получается расчетное значение пройденного пути, которое сравнивается с истинными значениями пройденного пути, полученные в виде кода с помощью счетчика СчИ и датчика импульсов ДИ связанного с осью центробежного ограничителя скорости ЦОС.
Лифт
имеет большую рабочую скорость движения
7 м/с. При ограниченном ускорении и рывке
путь, проходимый кабиной после получения
команды на замедление, измеряется
десятками метров. При собирательном
управлении схемой может быть зафиксирован
приказ или вызов на этаж, находящийся
в данный момент ближе, чем путь замедления.
В данном случае приказ или вызов не
должен быть выполнен. В данной схеме
вычислительная машина в каждый момент
времени, считая текущее заданное значение
скорости начальным
![]() ,
определяет путь замедления
,
определяет путь замедления![]() ,
который должна пройти кабина до остановки
при заданном рывке
,
который должна пройти кабина до остановки
при заданном рывке![]() и
начальном ускорении
и
начальном ускорении![]() .
Этот путь на рис. 54 изображен площадью
с вертикальной штриховкой. В сумме с
пройденным к этому моменту времени пути
.
Этот путь на рис. 54 изображен площадью
с вертикальной штриховкой. В сумме с
пройденным к этому моменту времени пути![]() (горизонтальная штриховка) он составляет
путь допустимой остановки
(горизонтальная штриховка) он составляет
путь допустимой остановки![]() ,
отсчитываемый от исходной точки. Это
путь сопоставляется с отсчитываемым
от той же точки расстоянием
,
отсчитываемый от исходной точки. Это
путь сопоставляется с отсчитываемым
от той же точки расстоянием![]() до ближайшего пункта, на котором заказана
остановка по приказу или вызову. Если
до ближайшего пункта, на котором заказана
остановка по приказу или вызову. Если![]() ,
то продолжается движение до тех пор,
пока не выполнится условие
,
то продолжается движение до тех пор,
пока не выполнится условие![]() ,
что и послужит основанием для переключения
привода на замедление с последующей
остановкой на заданном этаже. Если
,
что и послужит основанием для переключения
привода на замедление с последующей
остановкой на заданном этаже. Если![]() ,
то поступающий приказ или вызов не
отрабатывается.
,
то поступающий приказ или вызов не
отрабатывается.
Связь с кабиной является бесконтактной. Сигналы приказов КП или датчиков контроля безопасности ДКБ, установленных в кабине, передаются через антенну А и приемо-передающее устройство в схему управления.
При нахождении кабины на этаже схемой с помощью датчиков контроля положения ДКП осуществляется автоматическое выравнивание. Тормоз накладывается лишь при длительных остановках.
При
установленных при наладке значениях
![]() и
и![]() время пуска до скорости 7м/с составляет
около 15 с. Во всех режимах приведенная
система работает как система поддержания
постоянства скорости.
время пуска до скорости 7м/с составляет
около 15 с. Во всех режимах приведенная
система работает как система поддержания
постоянства скорости.