

Функциональная схема автоматизированного электропривода
В соответствии с приведенным выше определением электропривод представляет собой электромеханическую систему, электрическая часть которой состоит из электрических преобразователей, электромеханического преобразователя и системы управления, а механическая включает в себя все связанные движущиеся массы привода и механизма. Соответствующая этому определению функциональная схема современного автоматизированного электропривода представлена на рис. 1.1.
На рис. 1.1 широкими линиями со стрелками обозначены потоки силовой энергии, а тонкими линиями – информационные потоки. Стрелки определяют направление передачи энергии или информации.
В состав автоматизированного электропривода входят следующие элементы:
– коммутационная и защитная аппаратура (КЗА);
– электрический преобразователь энергии;
– электромеханический преобразователь энергии – электрический двигатель;
– механический преобразователь энергии;
– система управления электропривода (САУ).
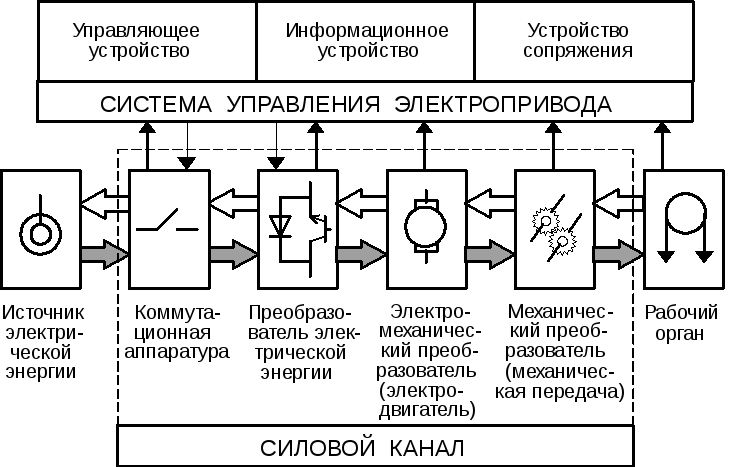
Рис. 1.1. Функциональная схема современного автоматизированного электропривода
Система автоматического управления электропривода содержит управляющее устройство, информационное устройство и устройство сопряжения.
Коммутационная и защитная аппаратура, электрический преобразователь энергии, электромеханический преобразователь энергии и механический преобразователь энергии образуют силовой канал электропривода.
Коммутационная и защитная аппаратура, электрический преобразователь энергии и электрическая система электродвигателя образуют электрическую систему электропривода (ЭС).
Вращающаяся часть электродвигателя (ротор, якорь), механическая передача производственного механизма с исполнительным (рабочим) органом (ИО) рабочей машины образуют механическую систему электропривода (МС).
Приведем определения понятиям преобразователей, входящих в силовой канал электропривода [3].
Преобразователь электрической энергии – это электротехническое устройство, преобразующее электрическую энергию с одними значениями параметров и/или показателями качества в электрическую энергию с другими значениями параметров и/или показателей качества.
Электродвигатель – это электромеханический преобразователь, предназначенный для преобразования электрической энергии в механическую энергию.
Механическая передача – это механический преобразователь, предназначенный для передачи механической энергии от электродвигателя к исполнительному органу рабочей машины и согласования вида и скоростей их движения.
Если в качестве электромеханического преобразователя используется электродвигатель постоянного тока, то такой привод является электроприводом постоянного тока, если же в качестве электромеханического преобразователя используется электродвигатель переменного тока, то такой привод является электроприводом переменного тока.
Направления развития электропривода на современном этапе
Индивидуальный электропривод является основным энергетическим исполнительным элементом электромеханических систем комплексной механизации и автоматизации. В современной иерархии управления технологическими процессами электропривод занимает низшую ступень, на которой выработанные высшими уровнями управления материализуются в силовые перемещения исполнительных органов в соответствии с заложенными в системе управления электропривода законами движения. Поэтому физические свойства электропривода и его регулировочные свойства играют решающую роль в технологической автоматике. Отмеченная роль электропривода обуславливает его дальнейшее совершенствование и развитие.
Назовем основные направления развития электропривода производственных механизмов и технологических комплексов на современном этапе.
1. Расширение области применения регулируемого электропривода, главным образом за счет частотно-регулируемого электропривода переменного тока с асинхронными короткозамкнутыми двигателями.
2. Интенсивное повышение технологических требований к динамическим и точностным показателям электропривода, расширение и усложнение его функций, связанных с управлением технологическими процессами, и соответствующее возрастание сложности САУ электроприводов.
3. Стремление к унификации элементной базы электропривода, созданию унифицированных комплектных электроприводов путем использования современной микроэлектроники и блочно-модульного принципа построения.
4. Упрощение кинематических цепей машин и механизмов, использование безредукторного электропривода и стремление к органическому конструкционному слиянию двигателей и механизма.
5. Энергетические показатели как мощных уникальных, так и массовых электроприводов малой и средней мощности приобретают особую остроту и важнейшее хозяйственное значение. Электрический привод является крупнейшим потребителем электрической энергии. Из всего огромного объёма электроэнергии, вырабатываемой в мире, примерно (60–70)% потребляют электроприводы и преобразуют её в механическую энергию, необходимую для работы машин и механизмов в производстве и быту.