

Управляемые преобразователи электрической энергии
Управляемые преобразователи электрической энергии выполняются главным образом как полупроводниковые преобразователи в виде неуправляемых и управляемых выпрямителей, нереверсивных и реверсивных тиристорных преобразователей, инверторов ведомых сетью, преобразователей частоты с непосредственной связью, автономных инверторов напряжения, автономных инверторов тока. Для устранения искажения формы напряжения сети в преобразователях применяют фильтрокомпенсирующие устройства. Виды преобразователей и их комбинации определяются типом электродвигателя и задачами управления, мощностью, диапазоном регулирования, необходимостью рекуперации энергии в сеть, влиянием преобразователей на питающую сеть. Схемотехнические решения преобразователей в электроприводах постоянного и переменного тока остаются традиционными. Изменения схем преобразователей главным образом связаны с появлением новых полупроводниковых приборов – мощных полевых транзисторов (MOSFET), биполярных транзисторов с изолированным затвором (IGBT), запираемых тиристоров (GTO).
Электрические двигатели регулируемых электроприводов
Асинхронные короткозамкнутые электродвигатели конструктивно наиболее просты и надежны, а регулируемые электроприводы на их базе в сочетании с автономными инверторами с ШИМ имеют статические и динамические характеристики равнозначные с приводами постоянного тока. По этой причине регулируемый электропривод переменного тока с короткозамкнутым асинхронным двигателем стал в настоящее время наиболее массовым электроприводом малой и средней мощности для производственных механизмов.
Синхронные электродвигатели традиционно использовались в диапазоне мощностей от сотен киловатт и выше для привода механизмов, работающих с постоянной скоростью. В синхронных двигателях для питания обмотки возбуждения, расположенной на роторе, необходим щеточный токопровод, что ограничивает их применение. В последнее время разработаны синхронные двигатели с бесконтактной обмоткой возбуждения. Широкое применение находят синхронные двигатели малой мощности с возбуждением от постоянных магнитов, электроприводы с такими двигателями обладают очень высокими динамическими показателями и энергетическими характеристиками.
Неизбежность применения щеточно-коллекторного узла в традиционных двигателях постоянного тока делает их мало конкурентными в сравнении с двигателями переменного тока.
На рис. 2.5 представлены системы электроприводов при питании от сети постоянного и переменного тока.
Принятые на рис. 2.5 обозначения: 1 – разомкнутые электроприводы с релейно-контакторным управлением, 1.1 – нерегулируемые разомкнутые электроприводы, 1.2 – регулируемые разомкнутые электроприводы с силовыми резисторами, 2 – замкнутые регулируемые электроприводы с управляемыми преобразователями, ДПТнв – двигатель постоянного тока независимого возбуждения, ДПТпв – двигатель постоянного тока последовательного возбуждения, ГПТ – генератор постоянного тока, АДкзр – асинхронный электродвигатель с короткозамкнутым ротором, АДфр – асинхронный электродвигатель с фазнымым ротором, СДпм – синхронный двигатель с постоянными магнитами, СД – синхронный электродвигатель, В – выпрямитель, ТП – тиристорный преобразователь, ИП – импульсный преобразователь, РН – регулятор напряжения, И – инвертор; ПЧнс – преобразователь частоты с непосредственной связью, АВК – асинхронный вентильный каскад, ВИД – вентильный индукторный двигатель.
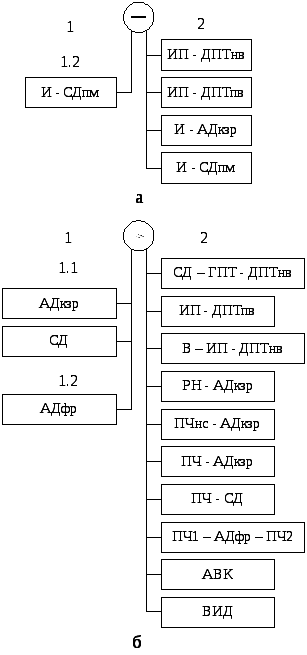
Вместо И-СДпм надо ДПТпв
Рис. 2.5. Основные варианты систем электропривода, получающих питание от источников постоянного (а) и переменного (б) тока