

4.6. Содержание отчета
4.6.1. Цель работы.
4.6.2. Функциональная схема скалярного частотного управления скоростью асинхронного двигателя.
4.6.3. Таблицы опытных
данных для выбранного закона регулирования
класса
![]() .
.
4.6.4. Экспериментальные
графики электромеханических
![]() и механических
и механических![]() характеристик испытуемого двигателя.
характеристик испытуемого двигателя.
4.6.5. Параметры схемы замещения испытуемого асинхронного двигателя.
4.6.6. Теоретические
графики электромеханических
![]() и механических
и механических![]() характеристик испытуемого двигателя.
характеристик испытуемого двигателя.
4.6.7. Анализ совпадения
экспериментальных и теоретических
графиков электромеханических
![]() и механических
и механических![]() характеристик.
характеристик.
4.6.8. Краткие выводы по лабораторной работе.
4.7. Контрольные вопросы
4.7.1. Почему способы регулирования скорости асинхронного двигателя изменением частоты питающего напряжения считаются наиболее эффективными?
4.7.2.
Какой закон регулирования класса
![]() является наиболее целесообразным для
постоянной нагрузки на валу двигателя?
является наиболее целесообразным для
постоянной нагрузки на валу двигателя?
4.7.3.
Какой закон регулирования класса
![]() является наиболее целесообразным для
вентиляторной нагрузки на валу двигателя?
является наиболее целесообразным для
вентиляторной нагрузки на валу двигателя?
4.7.4.
Какой
закон регулирования класса
![]() является наиболее целесообразным для
нелинейно спадающей нагрузки на валу
двигателя?
является наиболее целесообразным для
нелинейно спадающей нагрузки на валу
двигателя?
4.7.5. С какой целью применяется скалярная компенсация момента в электроприводах «Преобразователь частоты – асинхронный двигатель»?
4.7.6. Поясните принцип действия частотно – регулируемого электропривода с положительной обратной связью в канале регулирования напряжения.
4.7.7. Какие сигналы используются в электроприводах с компенсацией момента?
4.7.8. В каких случаях можно вычислить мгновенное значение тока в одной из фаз трехфазного асинхронного двигателя, если известны два других?
4.7.9. В
каких случаях при законе регулирования
класса
![]() можно добиться постоянства критического
момента асинхронного двигателя?
можно добиться постоянства критического
момента асинхронного двигателя?
4.7.10. В какой последовательности необходимо действовать при установке постоянной времени компенсации момента в преобразователе «Danfoss FC – 302»?
4.7.11. С каким шагом преобразователь «Danfoss FC – 302» позволяет изменять постоянную времени компенсации момента?
4.8. Список литературы
Чернышев А.Ю., Чернышев И.А. Механические и электромеханические характеристики автоматизированных электроприводов. Ч1. Учебное пособие/ – Томск: Изд-во ТПУ, 2004. – 123 с.
Лабораторная работа №4
5. ИССЛЕДОВАНИЕ СИСТЕМ «ПРЕОБРАЗОВАТЕЛЬ
ЧАСТОТЫ – АСИНХРОННЫЙ ДВИГАТЕЛЬ»
С КОМПЕНСАЦИЕЙ МОМЕНТА И СКОЛЬЖЕНИЯ
Цель работы: получить практические навыки настройки преобразователя частоты «Danfoss FC – 302», исследовать работу электропривода, выполненного по системе «преобразователь частоты – асинхронный двигатель» с компенсацией момента и скольжения.
5.1. Частотное управление асинхронным электроприводом
с компенсацией момента и скольжения
Сигналом тока
можно воздействовать как на канал
напряжения, так и на канал частоты.
Функциональная схема электропривода
с положительными обратными связями в
канале регулирования напряжения и
частоты приведена на рис. 5.1. При
одновременном воздействии на канал
частоты (компенсация скольжения) и
компенсации момента поддержание скорости
на требуемом уровне можно обеспечить
при меньших значениях напряжения
![]() .
.
Система электропривода
работает следующим образом. Асинхронный
двигатель работал на характеристике 1
(рис. 1.2) с моментом на валу двигателя,
равным
![]() .
Если момент на валу двигателя увеличится
и станет равным
.
Если момент на валу двигателя увеличится
и станет равным![]() ,
то возрастет и ток каждой фазы статора
двигателя
,
то возрастет и ток каждой фазы статора
двигателя
![]() ,
,
![]() ,
,
![]() и сигнал
и сигнал![]() формирователя тока статора (ФТС).
Увеличится как корректирующее напряжение
положительной обратной связи
формирователя тока статора (ФТС).
Увеличится как корректирующее напряжение
положительной обратной связи![]() ,
вычисляемое по выходному току
,
вычисляемое по выходному току![]() звеном с передаточной функцией
звеном с передаточной функцией
![]() , (1.1)
, (1.1)
где
![]() – коэффициент компенсации момента
(коэффициент положительной обратной
связи по частоте);
– коэффициент компенсации момента
(коэффициент положительной обратной
связи по частоте);![]() – постоянная времени задержки компенсации
момента, так и сигнал положительной
обратной связи по частоте
– постоянная времени задержки компенсации
момента, так и сигнал положительной
обратной связи по частоте![]() вычисляемый звеном с передаточной
функцией
вычисляемый звеном с передаточной
функцией
![]() , (1.2)
, (1.2)
где
![]() – коэффициент компенсации скольжения
(коэффициент положительной обратной
связи по частоте);
– коэффициент компенсации скольжения
(коэффициент положительной обратной
связи по частоте);![]() – постоянная времени задержки компенсации
скольжения.
– постоянная времени задержки компенсации
скольжения.
С ростом сигнала
положительной обратной связи возрастает,
как сигнал управления
![]() канала напряжения, что приводит в
конечном итоге к росту фазного напряжения
канала напряжения, что приводит в
конечном итоге к росту фазного напряжения![]() асинхронного двигателя, так и сигнал
управления
асинхронного двигателя, так и сигнал
управления![]() канала частоты, что приводит к росту
частоты
канала частоты, что приводит к росту
частоты![]() .
Характеристика 2 соответствует возросшему
фазному напряжению
.
Характеристика 2 соответствует возросшему
фазному напряжению![]() и увеличенной частоте
и увеличенной частоте![]() обмоток статора асинхронного двигателя.
обмоток статора асинхронного двигателя.
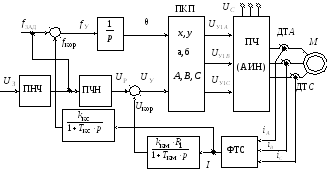
Рис. 1.1. Функциональная схема частотного управления асинхронным
электроприводом с компенсацией момента и скольжения
В результате действия корректирующих положительных обратных связей электропривод формирует механическую характеристику замкнутой системы – 3.

Рис. 1.2. Механические характеристики электропривода (кривые 1,2) и результирующая характеристика – 3 при наличии компенсации момента и скольжения
Анализ характеристик,
приведенных на рис. 1.2, показывает, что
в случае дополнительного воздействия
на канал частоты можно обеспечить
поддержание скорости на требуемом
уровне при малых значении фазного
напряжения
![]() .
В результате удается снизить магнитный
поток двигателя, а при правильной
настройке параметров обратных связей
– снизить и температурный режим работы
двигателя. Установлено [1],
что структуры с компенсацией частоты
оказываются чувствительными к изменению
параметров настроек, а с сильной
положительной обратной связью могут
оказаться неустойчивыми. В рассматриваемой
системе компенсация момента необходима
только в зоне низких значений частот.
Поэтому с ростом задающей частоты
.
В результате удается снизить магнитный
поток двигателя, а при правильной
настройке параметров обратных связей
– снизить и температурный режим работы
двигателя. Установлено [1],
что структуры с компенсацией частоты
оказываются чувствительными к изменению
параметров настроек, а с сильной
положительной обратной связью могут
оказаться неустойчивыми. В рассматриваемой
системе компенсация момента необходима
только в зоне низких значений частот.
Поэтому с ростом задающей частоты
![]() (или, что то же самое, задающего напряжения
(или, что то же самое, задающего напряжения![]() при дистанционном управлении) коэффициент
при дистанционном управлении) коэффициент![]() можно уменьшить вплоть до нуля меняя
его, например, в функции
можно уменьшить вплоть до нуля меняя
его, например, в функции![]() .
.