Данные расчета приведены в таблице 6
Таблица 6
|
t |
таб) |
факт) |
|
0 |
1,927 |
0,714 |
|
3 |
1,704 |
0,631 |
|
6 |
1,524 |
0,564 |
|
9 |
1,378 |
0,510 |
|
12 |
1,259 |
0,466 |
|
15 |
1,161 |
0,430 |
|
18 |
1,080 |
0,400 |
|
21 |
1,012 |
0,375 |
|
24 |
0,956 |
0,354 |
|
27 |
0,908 |
0,336 |
|
30 |
0,867 |
0,321 |
Продолжение таблицы 6
|
33 |
0,832 |
0,308 |
|
36 |
0,801 |
0,297 |
|
39 |
0,774 |
0,287 |
|
42 |
0,750 |
0,278 |
|
45 |
0,728 |
0,270 |
|
48 |
0,708 |
0,262 |
|
51 |
0,689 |
0,255 |
|
54 |
0,672 |
0,249 |
|
57 |
0,656 |
0,243 |
|
60 |
0,641 |
0,237 |
|
63 |
0,627 |
0,232 |
|
66 |
0,613 |
0,227 |
|
69 |
0,600 |
0,222 |
|
72 |
0,587 |
0,217 |
|
75 |
0,575 |
0,213 |
|
78 |
0,563 |
0,209 |
|
81 |
0,552 |
0,204 |
|
84 |
0,541 |
0,200 |
|
87 |
0,530 |
0,196 |
|
90 |
0,520 |
0,193 |
|
93 |
0,509 |
0,189 |
|
96 |
0,499 |
0,185 |
|
99 |
0,489 |
0,181 |
|
102 |
0,480 |
0,178 |
|
105 |
0,470 |
0,174 |
|
108 |
0,461 |
0,171 |
|
111 |
0,452 |
0,167 |
|
114 |
0,443 |
0,164 |
|
117 |
0,435 |
0,161 |
|
120 |
0,426 |
0,158 |
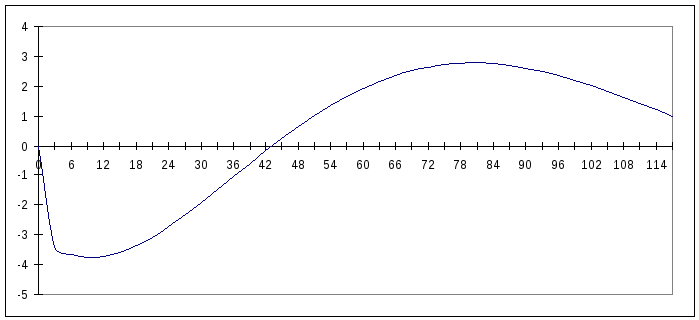
По данным таблицы 6 строится график (рис 3.)
Сравнивая графики суммарной девиации гирокомпаса “Курс – 4” для стандартного маневра и данного варианта определяем, что величина δj(таб.)> δj(факт.)
Задание 2.3
Произвести оценку максимально возможного значения результирующей инерционной девиации δj(мах), которая возникает в показаниях гирокомпаса в следствии её накопления при выполнении судном повторных манёвров, а также определить интервал времени между манёврами, при котором происходит максимально возможное накопление. Управление судном происходит по гирокомпасу “Курс-4”.
Управление судном происходит по гирокомпасу “Курс-4”.В силу сложившейся обстановки возникла необходимость двигаться переменными курсами и сделать последовательно несколько поворотов. Характеристики маневрирования определяются из таблицы (7).
Таблица 7
|
Широта места, φ
|
КК1 |
КК2 |
КК3 |
КК4 |
V1=V2=V3=V4, узлы |
|
75 |
10 |
172 |
15 |
160 |
15 |
Предполагаем, что повороты делались достаточно быстро. При быстром манёвре оценивать его влияние на гирокомпас можно с помощью величины VN
VN =V2*cosKK2 – V1 * cosKK1
То есть, для оценки величины суммарной инерционной девиации при произвольном манёвре судна допустимо использовать её значение при равноускоренном движении судна в соответствующей широте места и длительностью манёвра t=1 мин. Используя таблицу (8) строим график суммарной инерционной девиации гирокомпаса “Курс-4” для стандартного манёвра на курсе 1800 (рис 4.), набор скорости от 0 до 25 узлов, т.е. для VN=25 узлов, широте места φ=750 и времени t1=1мин.
Таблица 8
-
t
0
0
0,000
0,000
0,000
3
-3,4
-2,073
2,053
-2,000
6
-3,66
-2,231
2,210
-2,153
9
-3,76
-2,292
2,270
-2,212
12
-3,73
-2,274
2,252
-2,194
15
-3,59
-2,189
2,168
-2,112
18
-3,37
-2,054
2,035
-1,982
21
-3,08
-1,878
1,860
-1,812
24
-2,73
-1,664
1,648
-1,606
27
-2,34
-1,427
1,413
-1,376
30
-1,92
-1,171
1,159
-1,129
33
-1,49
-0,908
0,900
-0,876
Продолжение таблицы 8
|
36 |
-1,05 |
-0,640 |
0,634 |
-0,618 |
|
39 |
-0,61 |
-0,372 |
0,368 |
-0,359 |
|
42 |
-0,18 |
0,146 |
-0,145 |
0,141 |
|
45 |
0,24 |
0,390 |
-0,386 |
0,376 |
|
48 |
0,64 |
0,616 |
-0,610 |
0,594 |
|
51 |
1,01 |
0,823 |
-0,815 |
0,794 |
|
54 |
1,35 |
1,012 |
-1,002 |
0,976 |
|
57 |
1,66 |
1,177 |
-1,165 |
1,135 |
|
60 |
1,93 |
1,323 |
-1,310 |
1,276 |
|
63 |
2,17 |
1,439 |
-1,425 |
1,388 |
|
66 |
2,36 |
1,536 |
-1,522 |
1,482 |
|
69 |
2,52 |
1,609 |
-1,594 |
1,553 |
|
72 |
2,64 |
1,658 |
-1,642 |
1,600 |
|
75 |
2,72 |
1,689 |
-1,673 |
1,629 |
|
78 |
2,77 |
1,695 |
-1,679 |
1,635 |
|
81 |
2,78 |
1,677 |
-1,660 |
1,618 |
|
84 |
2,75 |
1,646 |
-1,630 |
1,588 |
|
87 |
2,7 |
1,591 |
-1,576 |
1,535 |
|
90 |
2,61 |
1,524 |
-1,510 |
1,471 |
|
93 |
2,5 |
1,439 |
-1,425 |
1,388 |
|
96 |
2,36 |
1,341 |
-1,328 |
1,294 |
|
99 |
2,2 |
1,238 |
-1,226 |
1,194 |
|
102 |
2,03 |
1,122 |
-1,111 |
1,082 |
|
105 |
1,84 |
0,994 |
-0,984 |
0,959 |
|
108 |
1,63 |
0,866 |
-0,857 |
0,835 |
|
111 |
1,42 |
0,738 |
-0,731 |
0,712 |
|
114 |
1,21 |
0,604 |
-0,598 |
0,582 |
|
117 |
0,99 |
0,000 |
0,000 |
0,000 |
Перестраиваем стандартный график девиации на три новые графика. Для этого используем следующие формулы:
 δj(факт)=
- δj(таб)*ΔVN
j
(факт)
δj(факт)=
- δj(таб)*ΔVN
j
(факт)
25
где ΔVN j (факт)=Vj+1*cos KK j+1 – V1 cos KK j ( j =1,2,3)
Данные расчетов для новых графиков приведены в таблице (8) в интервале от t=0 до t=117мин.
По данным таблицы (8) строим графики девиации и совмещаем их в общее начало координат (рис 5.). Далее раздвигая второй и третий графики по времени, определяем интервал времени между маневрами, при которых произойдет максимальное по величине накопление результирующей девиации. Далее строим график результирующей девиации (Рис 6.).
При маневрировании судна в показаниях гирокомпаса в общем случае возникают одновременно инерционные девиации первого и второго рода. Судоводителю приходится иметь дело с суммарной инерционной девиацией, которая может накапливаться при повторном маневрировании. В нашем случае, в момент времени t=81 мин., при повторном маневре, инерционная девиация (результирующая) достигает величины δ=2,78 , а в момент времени t =9 мин, при выполнении третьего маневра, результирующая инерционная девиация достигает δ= - 3.76 , что крайне отрицательно влияет на точность судовождения. В этом случае судоводителю следует считаться с тем, что в течение нескольких часов показания гирокомпаса будут неточны. Необходимо стремиться к тому, чтобы маневры делались быстро и последующие маневры выполнялись через равные промежутки времени.
Из графика результирующей девиации (рис 6.) выбираем два пиковых значения девиации δмах=3,76 и δмин= - 2,78.