

1. Пространство геометрических векторов
Геометрический вектор. Длина и направление вектора. Равенство векторов
Из школьного курса геометрии известно, что через две различные точки A и B можно провести прямую и при том только Точки A и B, а также все точки, лежащие между ними, называют отрезком. Расстояние между точками A и B, называют длиной отрезка.
|
A
C
D B
Рис.
1.1. Отрезок прямой (AB).
Вектор
|

Определение 1.1. Геометрическим вектором называют направленный отрезок, то есть отрезок, конечные точки которого упорядочены: одна из них является началом, а вторая – концом отрезка.
Чтобы отличать вектор от отрезка, у конца вектора ставят стрелку. Вектор имеет две характеристики:
длина,
направление.
Длина
вектора определяется путем измерения:
выбрав единичный
отрезок,
устанавливаем, сколько раз этот единичный
отрезок или какая-либо его часть
укладывается в данном отрезке. (Например,
![]() =1,38
см. означает, что в качестве единичного
отрезка выбран отрезок длиной в 1
сантиметр и в отрезкеPQ
138 раз
укладывается сотая доля такого отрезка).
Далеко не всегда единичный отрезок или
любая его часть укладывается в измеряемый
отрезок целое число раз. Например, если
построить квадрат, сторона которого
имеет длину, равную 1, то на какие бы доли
мы ни дробили сторону, в диагональ
квадрата не может уложиться целое число
таких долей. Это означает, что сторона
и диагональ квадрата несоизмеримы
и длина диагонали выражается иррациональным
числом.
=1,38
см. означает, что в качестве единичного
отрезка выбран отрезок длиной в 1
сантиметр и в отрезкеPQ
138 раз
укладывается сотая доля такого отрезка).
Далеко не всегда единичный отрезок или
любая его часть укладывается в измеряемый
отрезок целое число раз. Например, если
построить квадрат, сторона которого
имеет длину, равную 1, то на какие бы доли
мы ни дробили сторону, в диагональ
квадрата не может уложиться целое число
таких долей. Это означает, что сторона
и диагональ квадрата несоизмеримы
и длина диагонали выражается иррациональным
числом.
Существование несоизмеримых отрезков было установлено древнегреческим математиком и философом-мистиком Пифагором ( VI в. до н.э). Необходимость выражать числом длины всех отрезков потребовала введения, наряду с рациональными, иррациональных чисел. Множество, включающее в себя все рациональные и иррациональные числа, называют множеством действительных чисел и обозначают символом «R». Теория действительных чисел в своем современном виде существует благодаря трудам выдающихся европейских математиков второй половины XIX в. Р. Дедекинда (1831-1916), Г. Кантора (1845-1918), К. Вейерштрасса (1815-1897).
Теория
действительного числа позволила строго
обосновать возможность установления
взаимно однозначного соответствия
между действительными числами и точками
прямой (аксиома непрерывности
Кантора-Дедекинда). Если на прямой
выбрать направление и эталон длины
(отрезок OE
на рис. 1.2.),
то каждой точке X
этой прямой соответствует действительное
число x
равное длине отрезка OX
со знаком “+”, если направление вектора
![]() совпадает
с направлением прямой, и со знаком “ -
“ , если направления прямой и вектора
противоположны. С другой стороны, каждому
действительному числу, соответствует
вполне определенная точка такой прямой.
Из школьного курса математики известно,
что описанную выше прямую называютчисловой
осью. Связь
между действительными числами и точками
числовой оси столь глубока, что конкретные
числа в математике часто называют
“точками”.
совпадает
с направлением прямой, и со знаком “ -
“ , если направления прямой и вектора
противоположны. С другой стороны, каждому
действительному числу, соответствует
вполне определенная точка такой прямой.
Из школьного курса математики известно,
что описанную выше прямую называютчисловой
осью. Связь
между действительными числами и точками
числовой оси столь глубока, что конкретные
числа в математике часто называют
“точками”.
|
X`` O E X` x`` x`
Рис. 1.2. Числовая ось. |

Определение 1.2. Векторы называют коллинеарными, если они лежат на одной прямой или на параллельных прямых.
Определение 1.3. Два коллинеарных вектора называют сонаправленными, если после приложения их к какой-либо одной точке конец одного из векторов оказывается лежащим между началом и концом второго вектора или совпадать с ним, и противонаправленными , если концы их оказываются лежащими по разные стороны от общего начала.
На
рис. 1.2.
![]() и
и![]() ,
а также
,
а также![]() .
Здесь символами «
.
Здесь символами «![]() »
и «
»
и «![]() »
обозначены сонаправленность и
противонаправленность векторов.
»
обозначены сонаправленность и
противонаправленность векторов.
Отметим, что величина угла между сонаправленными векторами равна 0, между противонаправленными - .
Определение 1.4. два вектора называют равными, если они сонаправлены и длины их равны. Два вектора называют противоположными, если они противонапрвлены и длины их равны.
Аналогично тому, как длина вектора определяется путем сравнения с длиной заранее выбранного единичного отрезка, направление вектора определяется путем сравнения с заранее выбранными «базисными» направлениями. Базисные направления указываются с помощью базисных векторов.
Пусть V1 - множество всех направленных отрезков, лежащих на одной числовой прямой и приложенных к точке О (рис. 1.2). Каждый из этих отрезков определяет длину и направление всех, равных ему векторов, как лежащих на той же прямой, но приложенных к другим точкам, так и лежащих на любой из параллельных ей прямых. Поэтому, определив направления векторов из множества V1 , мы определим направления всех, коллинеарных им векторов.
Очевидно,
что векторы из множества V1
имеют лишь 2 возможных направления: они
могут быть сонаправленныи или
противонаправленными единичному вектору
![]() .
Это означает, что выбрав
.
Это означает, что выбрав![]() в качестве базисного вектора, и приняв
его направление за положительное, можно
описать направления всех, коллинеарных
ему векторов либо как положительное,
либо как отрицательное.
в качестве базисного вектора, и приняв
его направление за положительное, можно
описать направления всех, коллинеарных
ему векторов либо как положительное,
либо как отрицательное.
Определение 1.6. Векторы называют компланарными, если они лежат в одной плоскости или параллельных плоскостях.
Отметим, что два вектора всегда компланарны (см. рис 1.3 и рис. 1.4). Действительно два направленных отрезка могут быть либо коллинеарны либо неколлинеарны. Если они коллинеарны, то они лежат либо на одной прямой, либо на параллельных прямых (рс.1.3.). Как известно из школьного курса геометрии через прямую можно провести бесконечно много плоскостей, для которых эта прямая является линией пересечения. Через две параллельные прямые также всегда можно провести плоскость. Это и означает, что коллинеарные отрезки являются также и компланарными.
Пусть теперь два направленных отрезка неколлинеарны (рис 1.4). Начала этих векторов могут быть приложены либо к одной точке, либо к разным точкам. В первом случае направленные отрезки определяют три точки: общее начало и два различных конца, а через три точки можно провести плоскость. Во втором случае к каждому из начал этих отрезков можно приложить векторы, равные другому направленному отрезку. Таким образом, получим два параллельных треугольника, которые определят две параллельные плоскости.
|
D A A B B C С
D
Рис.1.3. Коллинеарные векторы всегда компланарны |


|
A B
A B D`
C C B` D
Рис.1.4. Два неколлинеарных вектора всегда компланарны |

|
O`
A`
O E2 V2 E1 A
O`` A``
|
A
E2 O E2 |
|
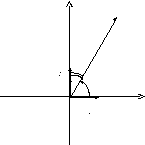
Рис.1.5.Направления всех компланарных друг другу векторов можно задать указав величины углов, которые образует представитель этого вектора вV2с базисными векторамиOE1 и OE2 | |

Пусть
V2
- множество всех направленных отрезков,
лежащих в одной плоскости и приложенных
к какой-либо «удобной» точке плоскости
(точке О на
рис 1.5). Проведем через эту точку две
взаимно перпендикулярные числовые оси
с единичными векторами
![]() и
и![]() .
Каждый из направленных отрезков
множества V2
определяет длину и направление всех,
равных ему векторов, как лежащих в той
же плоскости, но приложенных к другим
точкам, так и лежащих на любой из
параллельных ей плоскостей. Поэтому,
определив направления векторов из
множества V2
, мы определим направления всех,
компланарных им векторов.
.
Каждый из направленных отрезков
множества V2
определяет длину и направление всех,
равных ему векторов, как лежащих в той
же плоскости, но приложенных к другим
точкам, так и лежащих на любой из
параллельных ей плоскостей. Поэтому,
определив направления векторов из
множества V2
, мы определим направления всех,
компланарных им векторов.
Очевидно,
что направление любого вектора из V2
можно
задать, указав углы, которые образует
этот вектор с двумя базисными векторами
![]() и
и![]() (рис 1.5). Таким образом, имея два базисных
вектора, можно задать направление любого
направленного отрезка, компланарного
им. Для этого достаточно найти в V2
вектор, равный интересующему нас
направленному отрезку, и указать
величины углов, которые он образует с
базисными векторами
(рис 1.5). Таким образом, имея два базисных
вектора, можно задать направление любого
направленного отрезка, компланарного
им. Для этого достаточно найти в V2
вектор, равный интересующему нас
направленному отрезку, и указать
величины углов, которые он образует с
базисными векторами
|
O
|
E3
E1 O E2
|
|
Рис.1.6. Три вектора могут быть компланарны
или некомпланарны. Направление вектора
в пространстве задают величинами
углов, которые этот вектор образует
с базисными векторами
| |


Три
вектора могут быть как компланарны, так
и некомпланарны (рис. 1.6). Пусть V3
– множество всех направленных отрезков
в пространстве, приложенных к какой-либо
«удобной» точке пространства – точке
О.
проведем через эту точку три взаимно
перпендикулярных оси и приложим к ней
три единичных вектора отрезками![]() ,
,![]() и
и![]() (рис. 1.6), направление которых совпадает
с направлениями осей. Тогда направление
любого вектора из V3
можно задать, указав величины углов,
которые данный вектор образует с
(рис. 1.6), направление которых совпадает
с направлениями осей. Тогда направление
любого вектора из V3
можно задать, указав величины углов,
которые данный вектор образует с
![]() ,
,![]() и
и![]() (рис. 1.6). Любой направленный отрезок
пространства имеет своего «представителя»
во множестве V3
. Его
направление можно задать, указав
направление равного ему вектора из V3.
(рис. 1.6). Любой направленный отрезок
пространства имеет своего «представителя»
во множестве V3
. Его
направление можно задать, указав
направление равного ему вектора из V3.
Таким образом, направление и длина любого геометрического вектора может быть задана, если известны длина и направление равного ему отрезка, приложенного к «удобной» точке, к которой приложены также и базисные векторы. Для описания всех коллинеарных векторов достаточно рассмотреть множество V1, всех компланарных – V2, всех векторов пространства – V3 .
Определение 1.5. Множество всех равных друг другу векторов называют свободным вектором.
Свободные
векторы обозначают символами:
![]() ,
,![]() и
т.п. Свободный вектор будем рассматривать
через его представителя: направленный
отрезок, приложенный к «удобной» точке.
Таким образом, изучение всех геометрических
векторов будет сведено к изучению
пространств V1,
V2
и V3.
и
т.п. Свободный вектор будем рассматривать
через его представителя: направленный
отрезок, приложенный к «удобной» точке.
Таким образом, изучение всех геометрических
векторов будет сведено к изучению
пространств V1,
V2
и V3.
Но пространства эти будут неполны, если в каждое из них не ввести нуль-вектор.
Определение 1.6. Нуль-вектор – это вектор, длина которого равна 0.
Обозначение
нуль-вектора:
![]() .
В пространствах V1,
V2 и
V3
нуль-вектором
принято считать точку приложения
базисных векторов.
.
В пространствах V1,
V2 и
V3
нуль-вектором
принято считать точку приложения
базисных векторов.