

1.3 Параметры т-образной схемы замещения
Параметры Т-образной схемы замещения при номинальной частоте:
активное
сопротивление обмотки статора…………………….![]()
индуктивное
сопротивление рассеянья обмотки
статора……![]()
активное
сопротивление обмотки ротора, приведенное
к статора………………………………………………………………….![]()
индуктивное
сопротивление рассеянья обмотки ротора,
приведенного к статору…………………………………………………………………![]()
главное
индуктивное сопротивление……………………………..![]()
Суммарный
момент инерции двигателя и механизма,
приведенный к валу двигателя:
![]()
1.4 Базисные величины системы относительных единиц.
напряжение……….![]()
ток………………....![]()
частота…………….![]()
скорость
ротора…..![]()
сопротивление……..![]()
потокосцепление…..![]()
индуктивность……...![]()
В качестве базисного значения моментов двигателя и статического механизма выбираем значение электромагнитного момента двигателя в номинальном режиме:
![]() ,
,
где
![]() – коэффициент, учитывающий различие
значений электромагнитного момента и
момента на валу двигателя в номинальном
режиме.
– коэффициент, учитывающий различие
значений электромагнитного момента и
момента на валу двигателя в номинальном
режиме.
В качестве базисной мощности выбираем значение электромагнитной мощности двигателя в номинальном режиме, определяемое по следующей формуле:
![]() .
.
1.5 Относительные значения параметров схемы замещения двигателя.

Механическая постоянная времени системы «двигатель-механизм» составляет:
![]() .
.
Значения безразмерных коэффициентов в уравнениях, рассчитанные по выражениям, приведенным выше, сведены в таблицу 1.1:
Таблица 1.1 Значения безразмерных величин
-
Коэффициент






Значение
234.639
0.974
0.031
0.203
783.496
Модель
АКЗ, построенная по уравнениям (1.6) –
(1.11), представленная на рис. 1.4.На вход
модели в момент времени
![]() подаются
напряжения
подаются
напряжения![]() ,
,![]() ,
(
,
(![]() ),
тем самым реализуя прямой пуск.
Осциллоскопы измеряют относительные
значения электромагнитного момента и
скорости. Результаты моделирования
представлены на рис. 1.9. Они показывают,
что при прямом пуске вначале наблюдается
значительные колебания момента. Такие
же колебания наблюдаются в токе и
скорости.
),
тем самым реализуя прямой пуск.
Осциллоскопы измеряют относительные
значения электромагнитного момента и
скорости. Результаты моделирования
представлены на рис. 1.9. Они показывают,
что при прямом пуске вначале наблюдается
значительные колебания момента. Такие
же колебания наблюдаются в токе и
скорости.

Рис.
1.4 Полная модель асинхронного
короткозамкнутого двигателя во
вращающейся системе координат с
переменными
![]()

Рис. 1.5 Subsistem 1. Номинальные данные и параметры схемы замещения

\
Рис. 1.6 Subsistem 2. Расчет параметров электромеханической модели АД в системе относительных единиц

Рис.
1.7 Subsistem
3. Математическая модель асинхронного
двигателя во вращающейся системе
координат с переменными
![]()

Рис. 1.8 Subsistem 4. Преобразователь координат

Рис.1.9 Результаты моделирования, относительные значения электромагнитного момента и скорости
2 Разработка лабораторного стенда для исследования асинхронного электропривода с частотным управлением
2.1 Общий вид учебно-лабораторного стенда
Учебно-лабораторный стенд представляет собой комплекс, состоящий из трех основных блоков. Внешний вид стенда представлен на рисунке 2.1.
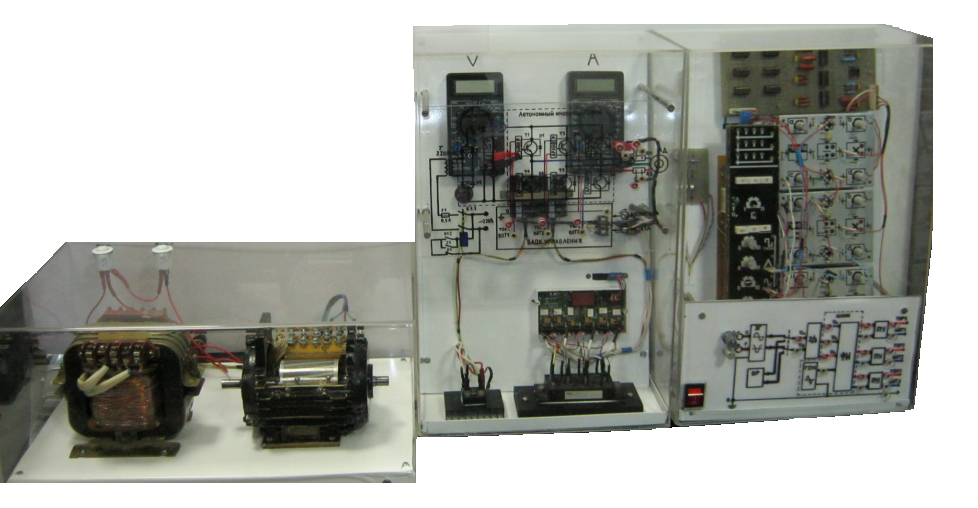
Рис. 2.1 Учебно-лабораторный стенд для исследования асинхронного электропривода с частотным управлением
В первом блоке располагается формирователь управляющих сигналов. Его можно разделить на пять субблоков: источник питания управляющей цепи, генератор синусоидального и косинсоидального сигнала, генератор пилообразного напряжения, блок преобразования координат и формирователь импульсов (рис. 2.2).

Рис. 2.2 Блок формирования импульсов
В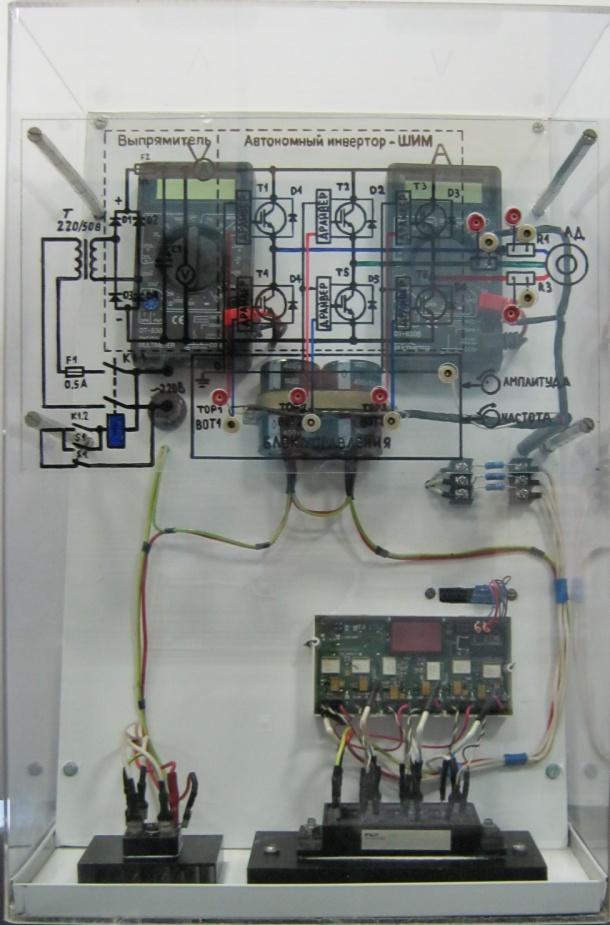 торой
блок содержит в себе модульIGBT-транзисторов,
модуль драйверов, диодный мост и С-фильтр
(рис. 2.3) .
торой
блок содержит в себе модульIGBT-транзисторов,
модуль драйверов, диодный мост и С-фильтр
(рис. 2.3) .
Рис. 2.3 Блок автономного инвертора ШИМ
Третий блок состоит из магнитного пускателя, понижающего трансформатора и дугостаторного асинхронного двигателя с короткозамкнутым ротором (рис. 2.4).

Рис. 2.4 Силовой блок
Структурная схема учебно-лабораторного стенда представлена на рисунке 2.5.

Рис. 2.5 Структурная схема учебно-лабораторного стенда