

--I семестр-- / Лекции 1to4 / ktop_l_1to4
.pdfЛекции по КТОП
25
Лекция 9.
Система проектирования печатных плат Cadence
Решение компании Cadence для сквозного проектирования печатных плат электронно-вычислительных устройств ориентировано, прежде всего, на сверхплотные и многослойные печатные платы быстродействующих устройств. В системе комбинируются инструменты, позволяющие вести проектирование, начиная с построения общей концепции и заканчивая полностью подготовленными к производству печатными платами. В состав пакета входят программы:
1.Project Manager – менеджер проектов;
2.РСВ (печатная плата) Library – управление библиотеками компонентов, разработка символов принципиальных схем (Pad Developer), топологических посадочных мест (Allegro Library), их верификация и группировка (Library Explorer);
3.Allegro РСВ (Printed Circuit Board)– редактор печатных плат с возможностями размещения компонентов, трассировкой проводников и технологической подготовкой к производству;
4.Specctra – система размещения компонентов и трассировки проводников. Эти процессы могут происходить одновременно;
5.Concert HDL – редактор принципиальных схем, обеспечивающий быстрый ввод проектов, групповую разработку и использование ранее созданных проектов в том числе и других САПР;
6.Capture CIS – редактор принципиальных схем, заимствованный из пакета OrCAD, и имеющий интегрированную систему управления удаленными и локальными базами данных компонентов – Component Information System.
Кстандартной конфигурации прилагается набор опций, предназначенный для реализации ряда специфических действий к печатным платам:
1.Allegro Perfomance Options – расширение редактора печатных плат для
разработки быстродействующих устройств, повторного использования старых проектов, подготовки процедуры автоматизированного тестирования и использования языка Skill;
2.Specctra Perfomance Options – расширенный набор правил проектирования для управления стратегией размещения и трассировки для программы
Specctra;
3.Pspice A/D – программа смешанного аналого-цифрового моделирования, заимствованная из пакета OrCAD;
4.Variant Design – многовариантное проектирование на основе базового проекта, поставляется для конфигурации включающей Concept HDL и Allegro;
5.Checkplus – расширение для редактора принципиальных схем Concept HDL, предназначеных для настройки и проверки правил проектирования;
6.Specctra Quest Signal Explorer – анализ целостности сигналов,
исследование паразитных эффектов печатных плат.
Пакет программ PCB Design Studio поддерживает технологию обмена информацией ODB++, разработанную фирмой Valor Computerized System, специализирующейся на решений для технологической подготовки производства. Эта технология поддерживает перспективный и интеллектуальный формат описаний печатных плат, который позволяет обеспечить высокое качество и
34
точность изготовления конечных изделий. Входящий в состав пакета редактор схем Capture CIS можно использовать совместно с системой электронного документооборота и управления производства, разработанной и внедренной НИИ точной механики, как элемент развивающихся CALS – систем.
Внедрение СALS-технологий при производстве электронновычислительной техники
Основной концепцией CALS (непрерывное развитие и поддержка жизненного цикла) является повышение конкурентоспособности изделия за счет эффективного управления информацией. Задача CALS – преобразование жизненного цикла изделия в автоматизированный процесс путем реструктуризации (реинжиринга) входящих в него процессов. Непрерывное развитие предполагает постоянное приобретение изделием новых свойств за счет его постоянной модернизации, что требует постоянного контакта между поставщиком и потребителем. Поддержка жизненного цикла изделия предполагает организацию взаимодействия между ее участниками на основе новых телекоммуникационных и информационных технологий. Что позволяет более полно учесть потребности заказчика, что в свою очередь снизит затраты на этапах эксплуатации и обслуживания изделия, и в конечном итоге уменьшить затраты на весь жизненный цикл, хотя удельный вес затрат при создании модернизации изделия увеличивается. Одна из основных задач при повышении эффективного управления информацией состоит в снятии коммуникационных барьеров между участниками жизненного цикла изделия. Для решения этой задачи концепция CALS предполагает создание единого информационного пространства для всех участников жизненного цикла изделия, которое должно:
∙аккумулировать всю информацию об изделии;
∙быть единственным источником данных о нем (прямой обмен между участниками жизненного цикла исключается);
∙формироваться на основе международных, государственных и отраслевых стандартов.
Единое информационное пространство создается с помощью программноаппаратных средств у уже имеющихся участников жизненного цикла. Единое информационное пространство создается в два этапа:
1.Автоматизация отдельных процессов жизненного цикла изделия и представление данных о них в электронном виде.
2.Интеграция автоматизированных процессов и относящихся к ним данных.
Это пространство может иметь уровень подразделения компании или корпорации. Для реализации стратегии CALS используют 3 группы методов:
1.методы анализа и реинжиниринга бизнес процессов – методы реструктуризации функционирования предприятия. Эти методы позволяют перейти от бумажного к электронному документообороту, что облегчает внедрение новых технологий проектирования;
2.Методы стандартизованного представления данных в электронном виде, относящихся к отдельным процессам жизненного цикла изделия – 1-й этап создания единого информационного пространства;
3.Методы интеграции данных об изделии при интеграции автоматизированных процессов жизненного цикла – 2-й этап создания единого информационного пространства.
35
Для интеграции всех данных применяются системы управления данными об изделии – Product Data Manager (PDM). Их задача: сбор всей информации, создаваемой прикладными системами в единую модель. Процесс взаимодействия PDM и прикладных программ строится на основе стандартных интерфейсов:
∙функциональные стандарты – отслеживают организационную процедуру взаимодействия компьютерных систем (IDEFO);
∙информационные стандарты – реализуют модель данных, используемую всеми участниками жизненного цикла (ISO 10303);
∙стандарты на программную архитектуру – задают архитектуру программных систем, необходимую для организации взаимодействия без участия человека (CORBA);
∙коммуникационные стандарты – указывают способ физической передачи данных по локальным и глобальным сетям (Internet – стандарт).
Вобщем случае внедрение новых информационных технологий сопровождения изделий связано, прежде всего, с реализацией системы
формализованного компьютерного описания изделия электронно-вычислительной техники на всех этапах жизненного цикла, которое включает:
∙стандартный язык обобщения размножаемых документов – SGML;
∙подсистему компьютерной графики CGM;
∙структурированный язык запроса SQL;
∙стандарт обмена данными о модели изделия ISO 10303;
∙язык высокого уровня описания модели изделия и аппаратуры на основе этих изделий VHDL, VeriLog.
36
21 / 25
Лекции по КТОП
Лекция 6.
Постановка задачи размещения модулей.
После распределения конструктивных элементов РЭА по коммутационным пространствам различного уровня и иерархии, для каждой полученной в результате компоновки сборочной единицы производят размещение включенных в его состав элементов предыдущего уровня, т.е. выбирают такое их взаимное расположение, при котором наилучшим образом учитываются предъявленные к аппаратуре требования.
Постановка задачи.
Исходной информацией при решении задач размещения являются:
∙данные о конфигурации и размерах коммутационного пространства, определяемые требованиям установки и крепления данной сборочной единицы в аппаратуре;
∙количество и геометрические размеры конструктивных элементов подлежащих размещению;
∙ряд ограничений на взаимное расположение отдельных элементов, учитывающих особенности разрабатываемой конструкции.
Задача сводится к отысканию для каждого размещаемого элемента таких позиций, при которых оптимизируется выбранный показатель качества и обеспечиваются наиболее благоприятные условия для последующего электрического монтажа. Основная сложность постановки задач размещения заключается в выборе целевой функции. Связано это с тем, что одной из главных целей размещений является создание наилучших условий для дальнейшей трассировки соединений, что невозможно проверить без проведения самой трассировки. Любые другие способы оценки качества размещения (минимум числа пересечения ребер графа, интерпретирующего электрическую схему соединений, разбиение графа на минимальное число плоских суграфов и т.д.), хотя и позволяют создать благоприятные условия для трассировки, но не гарантируют получение оптимального результата, т.к. печатные проводники представляют собой криволинейные отрезки конечной ширины, конфигурация которых определяется в процессе их построения и зависит от порядка проведения соединений. Следовательно, если для оценки качества размещения элементов выбрать критерий непосредственно связанный с получением оптимального рисунка металлизации печатной платы, то конечный результат может быть найден при совместном решении задач размещения, выбора очередности проведения соединений и трассировки, что практически невозможно уже для схем средней сложности, вследствие огромных затрат машинного времени. Поэтому все применяемые алгоритмы размещения используют промежуточные критерии, которые лишь качественно способствует решению основной задачи: получение оптимальной трассировки соединений.
Ктаким критериям относятся:
1.минимум суммарной взвешенной длины соединений;
2.минимум числа соединений, длина которых больше заданных;
3.минимум числа пересечений проводников;
4.максимальное число соединений между элементами, находящимися в соседних позициях, либо в позициях указанных разработчиком;
5.максимум числа цепей простой конфигурации.
29
Наибольшее распространение в алгоритмах размещения получил первый критерий. Это объясняется следующими причинами: уменьшение длин соединений улучшает электрические соединения устройства и упрощает трассировку печатных проводников и снижает трудоемкость изготовления.
В зависимости от конструкции коммутационной платы и способа выполнения соединений, расстояние между позициями установки элементов подсчитывается по одной из формул:
d (1)ij = |
|
|
|
|
|
|
|
|
|
|
|
|
|
(xi |
− x j )2 |
|
+ (yi |
− y j )2 |
(1) |
||||||
d (2)ij |
= |
|
xi |
− x j |
|
+ |
|
yi |
− y j |
|
(2) |
|
|
|
|
|
|||||||||
d (3)ij = |
(xi − x j )t + (yi − y j )t |
(3), |
||||||||||
где (xi , yi ) и (x j , y j ) – координаты i-ой и j-ой позиции коммутационной платы.
Формула (1) соответствует проведению проводников по кратчайшему пути между соединяемыми точками.
Формула (2) предлагает раскладку проводников параллельным сторонам платы. Формула (3) – применяется при наличии особых требований к максимальной длине отдельных соединений (как правило, t=2).
При практической реализации алгоритма размещения часто используют представления конструктивных элементов и позиции на коммутативной плате точками, совпадающие с их геометрическими центрами, а все соединения между элементами приводят к попарно взвешенным связям.
При практической реализации алгоритмов размещения часто используют представление конструктивных элементов и позиций на коммутационной плате точками, совпадающими с их геометрическими центрами, а все соединения между элементами приводят к попарно взвешенным связям.
Весовые оценки связей учитывают такие характеристики схемы, как число электрических цепей между элементами, теплонагруженность элементов, распространения сигналов в цепях и т.д. Широкий класс таких оценок описывается формулой:
g |
(s)ij χ(ρs ) |
|
cij = å f |
(4) |
s=1
где f (s)ij - вес s-ой цепи, связывающей элементы i и j;
χ(ρs )- коэффициент учета размера цепи, равный 2/ ρs ;
ρs - число выводов s-ой цепи;
g - число цепей, связывающих элементы i и j.
Величина f sij определяет важность s-ой цепи с точки зрения минимизации ее
длины.
Если при решении задач размещения требуется произвести рассредоточение теплонагруженных элементов, то
|
|
c′ |
|
|
cij = |
|
|
ij |
(5) |
|
|
wi + w j |
||
1 + kт |
|
|
||
|
w |
|
||
|
|
|
доп |
|
где cij′ - значение коэффициента взвешенной связности, определяемое из соотношения (4);
wi , wj - мощность рассеяния i-го и j-го элементов;
wдоп - допустимая мощность рассеяния двух рядом стоящих элементов; kт - коэффициент, учитывающий теплоотдачу в реальной конструкции.
В общем виде задача размещения конструктивных элементов на коммутационной плате формулируется следующим образом. Задано множество конструктивных элементов:
R= {r1,r2 ,Κ ,rn }
имножество связей между элементами:
V= {v1,v2 ,Κ ,vp },
атакже множество установочных мест (позиций) на коммутационной плате
T = {t1,t2 ,Κ ,tk }. Найти такое отображение множества R на множестве T, которое
обеспечивает экстремум целевой функции F.
Если критерием качества размещения является минимум суммарной взвешенной длины соединений, то задача состоит в минимизации:
n n
F = å åcij dij (6). i =1 j =1
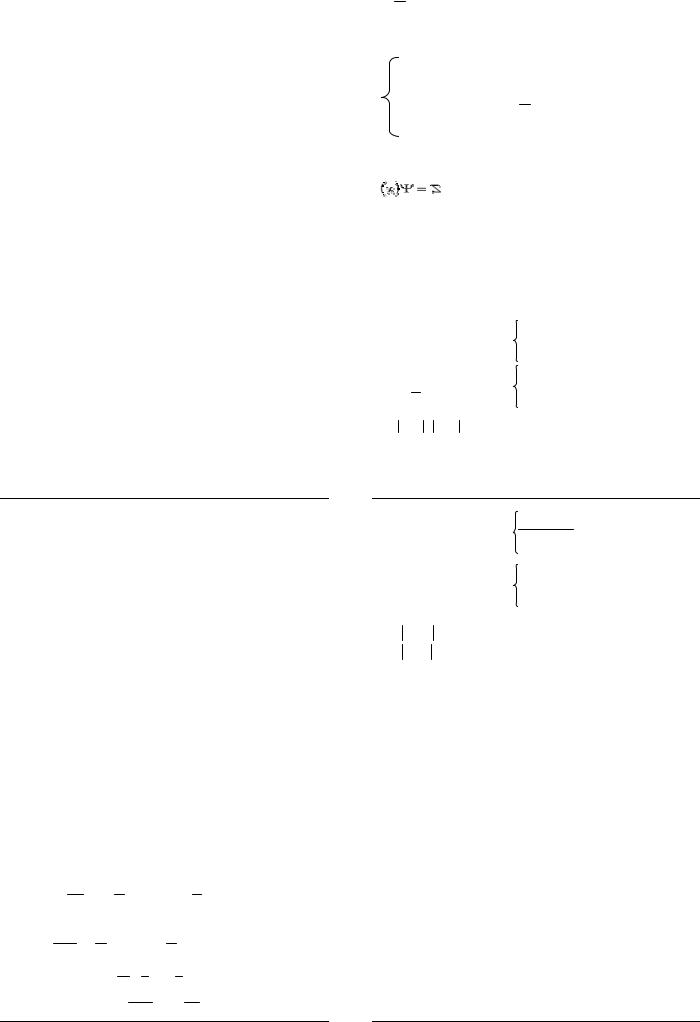
Обычно поле позиций (коммутационная плата) имеет форму прямоугольника Pab = a × b с координатами 0 ≤ x ≤ a и 0 ≤ y ≤ b . Вся площадь платы разбивается
на ряд областей (позиций), число которых должно быть не меньше числа размещаемых элементов (рис. 1). В результате получим фиксированные позиции для установки элементов.
Перед разбиением поверхности коммутационной платы на позиции выделяют области для размещения выводных контактных зон схемы, а также запрещенные области, в которых не должны размещаться элементы схемы.
Все конструктивные элементы, подлежащие размещению, можно условно разделить на три группы:
1.нефиксированные элементы, местоположение которых на плате заранее не известно. Пусть таких элементов будет q ;
2.граничные элементы, к которым относятся элементы, связанные с разъемами, осуществляющие электрическую связь с элементами, расположенными на других коммутационных платах. Т.к. разъемы обычно помещают на внешней стороне коммутационной платы, то эти элементы желательно располагать у границы коммутационного поля. Пусть число таких элементов будет h − q
3.фиксированные элементы, местоположение которых заранее известно (указано разработчиком). Таких элементов будет n − h
31
Ограничение на размещение элементов указанных трех групп имеют следующий вид:
x* ≤ x ≤ a − x*; |
|
|
||
i |
|
|
|
|
1 ≤ i ≤ q :{y* ≤ yi ≤ b − y*; |
|
|
||
x = x*; |
|
x* ≤ x ≤ a − x*; |
||
i |
|
|
|
i |
q + 1≤ i ≤ h :{y* ≤ y |
i |
≤ b − y* |
или{ |
y = y*; |
|
|
|
i |
|
h +1 ≤ i ≤ n :{xi = βi ; yi = γ i ;
где x* и y*- это координаты центра левой нижней позиции (рис.1); βi и γ i - координаты центра i-го фиксированного элемента.
Для конкретного случая задачу размещения можно сформулировать следующим образом: найти такое местоположение элементов на коммутационной плате, при котором достигается минимум:
|
n |
n |
+ (yi − y j )t ]ν |
|
|
F = å åcij [(xi − x j )t |
(7) |
||
|
i =1 j =1 |
|
|
|
при x* ≤ x ≤ a − x* |
для 1 ≤ i ≤ q ; x |
= x* |
|
|
i |
|
i |
|
|
|
|
для q +1 ≤ i ≤ h; |
|
|
y* ≤ yi |
≤ b − y* |
для 1 ≤ i ≤ h; |
|
|
xi = βi ; |
yi = γ i |
для h + 1≤ i ≤ n (8) |
|
|
Оптимизацию размещения осуществляют, как правило, из некоторого случайного или интуитивно выбранного первоначального размещения.
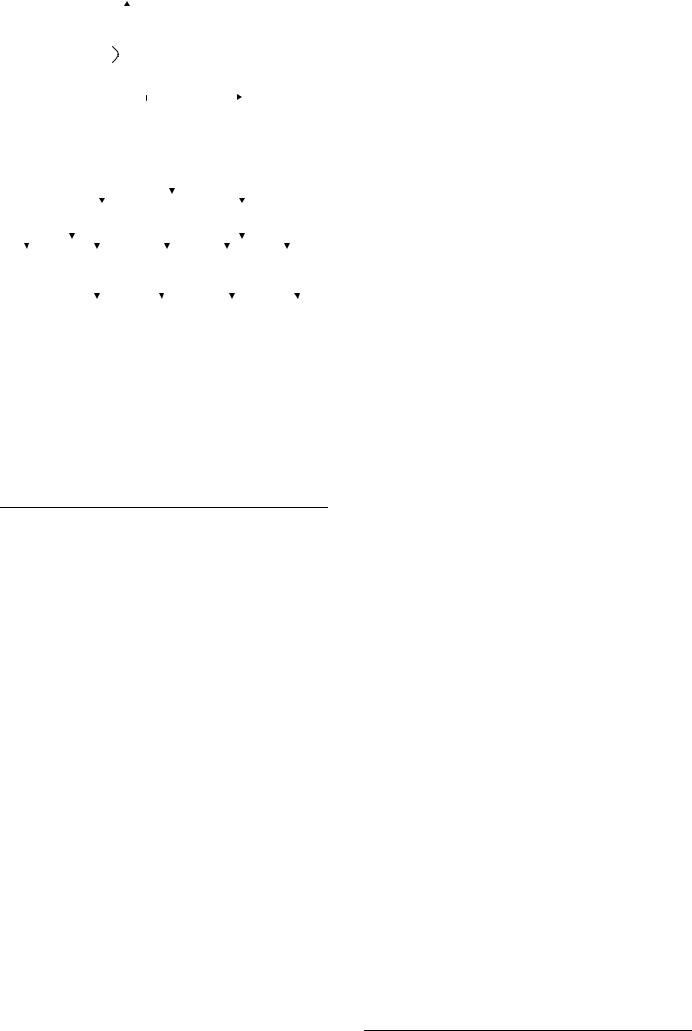
По принципам реализации известные алгоритмы размещения можно разделить на алгоритмы, использующие непрерывно-дискретные и дискретные методы оптимизации (рис.2). Эффективность того или иного алгоритма обычно оценивают по результатам решения типовых конструкторских задач.
30 |
|
32 |
22 / 25
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Лекции по КТОП |
|
|
|
|
|
|
|
|
|
|
|
Y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
генерации возможных проектных решений, так и их оценку с учетом взаимосвязи |
|||
|
|
|
|
|
|
|
|
|
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
используемых параметров и критериев. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
2 |
|
3 |
|
4 |
|
|
|
|
|
|
|
|
|
3. Возможность сравнения вариантов проектных решений и вариантов проектных |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
стратегий (выбор различных алгоритмов проектирования), так как от правильности |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
выбора алгоритма зависит качество характеристик проектируемого объекта. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
6 |
|
7 |
|
8 |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4. Эффективное создание программного обеспечения. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
9 |
|
10 |
|
11 |
|
12 |
|
|
|
|
|
|
|
|
|
5. Возможность принятия групповых решений, принимаемых несколькими |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
конструкторами или несколькими группами конструкторов по одному вопросу. Это |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
y* |
|
|
|
|
13 |
|
14 |
|
15 |
|
16 |
|
|
|
|
|
|
|
|
|
относится к формулировке технического задания, выбору структуры сложного |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X |
|
|
|
|
|
технического объекта, его элементной базы, определению отдельных |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
0 |
|
|
|
|
x* |
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
компонентов устройства, возможности оперативно согласовывать интерфейсы и |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
другие проектные параметры стыкуемых устройств и подсистем и объективно |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
оценивать предлагаемые варианты, выбирая наиболее приемлемый, при этом |
Рис.1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
достаточно сложной является процедура согласования критериев разработки |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
стыкуемых модулей и устройств, которые также позволяет решать применение |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
систем поддержки принятия решений. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Алгоритмы размещения |
|
|
|
|
|
|
|
|
|
|
|
6. Возможность параллельной работы всех конструкторов, участвующих в |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
элементов |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
проектировании объекта. |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7. Система поддержки принятия решений применяется для генерации и оценки |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вариантов технологических маршрутов при технологической подготовке |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
производства. |
|
|
|
Непрерывно-дискретные |
|
|
|
|
|
|
|
|
|
|
|
Дискретные методы |
|
|
|
8. Генерация отчетов. |
||||||||||||||||||
|
|
|
|
|
методы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Градиентные |
|
|
|
Построение |
|
|
Алгоритмы |
|
|
|
|
Алгоритмы |
|
Эвристические |
|
||||||||||||||||||||||
методы |
|
|
|
динамических |
|
|
случайного |
|
|
|
|
назначения |
|
|
алгоритмы |
|
|||||||||||||||||||||
оптимизации |
|
|
|
моделей |
|
|
|
|
поиска |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Линейное |
|
Квадратичное |
|
Алгоритмы |
|
Алгоритмы |
назначение |
|
назначение |
|
парных |
|
последоват. |
|
|
|
|
перестановок |
|
установки |
|
|
|
|
|
|
элементов |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.2
33
Лекция №7 21.11.2002г.
Компьютерное принятие проектных решений в CAD/CAM/CAEсистемах электронной техники
1. Поддержка принятия решений
Конструктор при принятии проектных решений исходит как из субъективных представлений об эффективности возможных альтернатив и важности различных критериев оценки качества принимаемых решений, так и на основе объективных составляющих, к которым относятся наличие математических моделей оценки численности значения критериев и ограничения, накладываемые на параметры решения. Увеличение объема информации, поступающей к конструкторам, усложнение решаемых задач, необходимость учета большого числа взаимосвязанных факторов обуславливают применение компьютерной техники. Эти системы получили название систем поддержки принятия решений. Системы поддержки принятия решений являются человеко-машинными объектами, которые позволяют лицу, принимающему решение, использовать данные, знания, объективные и субъективные модели для анализа и решения слабо структурированных и неструктурированных проблем. К слабо структурированным относят задачи, которые содержат количественные и качественные оценки, и качественные преобладают. Неструктурированные задачи имеют только качественное описание. Человеко-машинная процедура принятия решения в CAD/CAM/CAE-системах представляет собой итеративный процесс взаимодействия конструктора и компьютера. Система поддержки принятия решений в CAD/CAM/CAE решает следующие задачи:
1.Генерация возможных вариантов конструкторских решений и проектных стратегий.
2.Осуществляет оценку вариантов и выбирает лучший (рациональный).
3.Обеспечивает постоянный обмен информацией между конструкторами о принимаемых решениях и помогает согласовывать групповые решения.
4.Моделирует принимаемые решения (когда возможно). При отсутствии аналитической модели могут использоваться методы статистической обработки результатов предыдущих проектов.
5.Оценивает соответствие выполнения принятых конструкторских решений намеченным целям.
2.Возможности, предоставляемые конструкторам системой поддержки принятия решений при проектировании сложных объектов.
1.Комплексная автоматизация проектирования от разработки структуры проектируемого объекта до выдачи рабочих чертежей, а также технологическая подготовка производства. При этом система поддержки принятия решений позволяет преодолевать «узкие места» в процессе проектирования объекта.
Пример: прогностическая оценка вариантов проектного решения, анализ сложности задачи трассировки, учет особенностей технологии производства в процессе разработки изделия. Именно применение системы поддержки принятия решений, особенно на этапе аванпроектирования, делает возможным внедрение технологий нисходящего, сквозного и параллельного проектирования.
2. Увеличение числа проработанных вариантов проекта на всех уровнях проектирования с возможностью выбора наиболее рационального варианта. При этом система поддержки принятия решений берет на себя как процедуру
Лекция 8
Алгоритмы, использующие непрерывно – дискретные методы оптимизации.
При использовании данных методов оптимизации задача размещения решается в два этапа:
∙на первом этапе определяют координаты местоположения центров элементов, при которых целевая функция F имеет экстремальное значение;
∙на втором - полученные координаты "округляются" в фиксированные целочисленные значения координатной сетки, нанесенной на поверхность коммутационной платы,
Алгоритмы, использующие градиентные методы.
При использовании градиентных методов для отыскания оптимального размещения элементов на плате по критерию минимума суммарной взвешенной длины соединений решение задачи сводится к минимизации целевой функции
n |
n |
] |
F = ååcij [(xi − x j )2 + (yi − y j )2 |
||
i=1 |
j=1 |
|
где (xi,yj) и (xj,yj)- координаты I-ой и j-ой позиции коммутационной платы; сij -весовые оценки связей.
При ограничениях:
x*≤ xi |
≤ a-x* |
для 1≤ i ≤ q; |
||
xi=x* |
|
для q+1≤ i ≤ h; |
||
y* ≤ yi ≤ b-y* |
для |
1≤ i ≤ h; |
||
x i |
≤ βi; yi |
=γi |
для |
h+1≤ i ≤ n. |
где x* и y* - координаты центра левой нижней позиции;
βi и γi - координаты центра i-го фиксированного элемента.
Так как целевая функция является многомерной, то градиент аналитически выражают в виде суммы частных производных по всем нефиксированным координатам xi (i=1,2,3…,q) и yi(i=1,2,3,…,h)
Ñ F = å ¶ F |
x i + å ¶ F |
y i |
|||
q |
→ |
h |
→ |
||
i = 1 |
¶ x i |
|
i = 1 |
¶ y i |
|
→→
где x i , y i - орты (q×h) – мерного пространства.
37
23 / 25
Лекции по КТОП
Движение по координатам xi и yi осуществляют до тех пор, пока на очередной итерации не будут выполняться соотношения:
" x i |
Î X 0 |
é |
¶F |
£ ε , x |
* |
£ x i |
£ a - |
x |
* |
ù |
, i = 1,2,3,..., |
q ; |
|||||
ê |
|
|
|
|
ú |
||||||||||||
¶x i |
|
|
|||||||||||||||
|
|
|
ë |
|
|
|
|
|
|
|
|
û |
|
|
|||
|
|
é |
|
¶F |
£ ε , y |
* |
|
|
|
|
* |
ù |
|
|
|||
" y i |
Î Y |
0 ê |
|
|
|
|
|
|
£ y i |
£ b - |
y |
|
|
ú , i = 1,2,3,..., |
h. |
||
|
¶y i |
|
|
|
|
||||||||||||
|
|
ë |
|
|
|
|
|
|
|
|
|
û |
|
|
|||
где ε- ранее заданная погрешность нахождения экстремума F.
При использовании градиентных методов местоположение конструктивных элементов на плате получается в непрерывных координатах. Поэтому на втором этапе проводят "округление" полученных величин до ближайших целочисленных координат, т.е. все нефиксированные элементы сдвигаются в фиксированные позиции координатной сетки платы. При этом для оценки оптимальности сдвига используют критерий минимума суммы квадратов приращения координат:
q |
2 |
h |
|
2 |
S = å(xi − Ai ) |
+ å(yi − Bi ) |
|
||
i =1 |
|
i=1 |
|
|
где (xi, yi) и (Ai,Bi) - координаты центра i -го элемента |
и |
i -ой позиции |
||
соответственно. |
|
|
|
|
К достоинствам градиентных методов относятся сравнительно небольшие |
||||
затраты времени на отыскание экстремума целевой функции, а также наличие стандартных программ для решения данного класса задач.
Недостатками этой группы алгоритмов являются:
∙возможность получения лишь локального экстремума;
∙большая неравномерность распределения элементов на плате до "округления" координат.
Всвязи с указанными недостатками в чистом виде градиентные методы для
решения задач размещения не используют. Их применяют в сочетании с методами случайного поиска, отыскивая при этом глобальный экстремум целевой функции.
Алгоритмы, использующие динамические модели.
В основу этой группы алгоритмов положен динамический метод B.C. Линского. Процесс размещения элементов на плате представляется как движение к состоянию равновесия системы материальных точек (элементов), на каждую из которых действуют силы притяжения и отталкивания, интерпретирующие связи между размещаемыми элементами. Если силы притяжения, действующие между любыми двумя материальными точками ri и rj. пропорциональны числу электрических связей между данными конструктивными элементами, то состояние равновесия такой системы соответствует минимуму суммарной длины всех соединений. Введение сил отталкивания материальных точек друг от друга и от границ платы исключает возможность слияния двух любых точек и способствует их равномерному распределению по поверхности монтажного поля. Чтобы устранить возникновение в системе незатухающих колебаний, вводят силы
38
сопротивления среды, пропорциональные скорости движения материальных точек. Задача оптимального размещения элементов сводится к нахождению такого местоположения точек, при котором равнодействующие всех сил обращаются в нуль. Решение задачи осуществляется в три этапа. На первом этапе, используя критерий минимума суммарной взвешенной длины связей, производят размещение материальных точек на условном поле позиций без учета требовании равномерности их распределения по поверхности и попадания точек в фиксированные позиции поля. Полученное решение используют в качестве начального размещения на втором этапе, где на материальные точки начинают действовать силы притяжения и отталкивания. Под влиянием этих сил точки начинают перемещаться к положению равновесия системы, при котором обеспечивается приемлемая степень равномерности их размещения на поле позиций. На третьем этапе точки сдвигаются в фиксированные позиции платы при минимально возможных изменениях их взаиморасположения.
Рассмотрим отдельные этапы работы данного алгоритма. Пусть необходимо минимизировать целевую функцию (1) при ограничениях (2).
Для получения начального размещения точек приравняем все частные производные по нефиксированным координатам нулю и решим систему (q+h) линейных уравнений:
n |
(x i |
− x j )= 0 , i = 1,2,.., |
|
å c ij |
q ; |
||
j =1 |
|
|
|
n |
(y i |
− y j )= 0 , i = 1,2 ,..., |
|
å c ij |
h. |
||
j =1 |
|
|
|
Однозначное решение может быть получено лишь при наличии в каждой связной компоненте не менее двух фиксированных точек (каждое уравнение должно иметь не менее двух данных значений координат). Если какая-либо связная компонента имеет только одну фиксированную точку, то в результате минимизации длины связей все точки этой компоненты сольются с фиксированной. Отсутствие фиксированных точек в любой связной компоненте приведет не только к слиянию всех ее точек, но и к неопределенности ее местоположения. Как правило» одна из таких фиксированных точек имеется в каждой цепи на разъеме, другую фиксируют искусственно, причем желательно, чтобы ее местоположение было как можно дальше от разъема.
Затем рассматривают движение материальных точек из полученного первоначального размещения к положению равновесия системы. Для каждой пары точек ri и rj вводят силы притяжения:
Fij = c ij f (ri , r j )= c ij f (x i , x j , y i , y j )
и отталкивания:
Φ ij = ϕ (ri , r j )= ϕ (x i , x j , y i , y j ).
Кроме того, к каждой точке ri прикладывают силы отталкивания от границ платы:
G i = g (ri )= g (x i , y i )
и сопротивления среды:
H i = k v i ,
39
где k - некоторый положительный коэффициент;
v i - скорость движения i -ой точки.
Движение нефиксированных материальных точек описывается системой дифференциальных уравнений:
·· |
n |
|
|
|
|
|
|
|
· |
xi |
= å[cij |
fx (xi , xi , yi , yj )−ϕx (xi , xj , yi , yj )]− gx (xi )−k xi ,i =1,2,...,q; |
|||||||
|
j=1 |
|
|
|
|
|
|
|
|
|
i¹ j |
|
|
|
|
|
|
|
|
·· |
n |
|
|
|
|
· |
|||
yi |
= å[cij |
fy |
(xi ,xi , yi , yj )−ϕ y |
(xi , xj , yi , yj )]− |
gy |
(yi )− k yi ,i =1,2,...,h; |
|||
|
j=1 |
|
|
|
|
|
|
|
|
|
i¹ j |
|
|
|
|
|
|
|
|
Для решения данной системы уравнений можно использовать метод Эйлера, который позволяет выполнить последовательные вычисления значений
произвольной функции:
по уравнению
· |
= h (z , x ); |
z(t+1) =z(t) +h(z(t),x(t) ) (x(t+1) −x(t) ) |
z |
где h (z(t),x(t)) - значения z∙ на t -oм шаге;
х(t) ,х(t+1),z(t),z(t+1) - значения аргументов и искомой функции на t-ом и на (t+1) -ом шагах соответственно.
Выражения для сил, действующих на материальные точки, определяются разработчиком, исходя из требований к размещению элементов на плате. В качестве примера рассмотрим один из возможных вариантов этих выражений.
Силы притяжения:
|
|
|
|
|
k1 (xi - x j )(Dnp2 - dij2 ) |
|
|
|
||
ϕ x (xi , x j , yi , y j )= |
, если Dnp2 |
- dij2 |
³ 0 ; |
|||||||
|
|
dij3 |
|
|||||||
|
|
|
0 – в противном случае |
|
|
|||||
|
|
|
|
|
k1 (yi - y j )(Dnp2 - dij2 ) |
|
|
|
||
f y (xi , xj , yi , yj )= |
|
, если Dnp2 |
- dij2 |
³ 0 ; |
||||||
3 |
|
|||||||||
dij
0 – в противном случае где k1 - коэффициент пропорциональности;
dij = xi − x j + yi − y j ;
Dnp - коэффициент, учитывающий диапазон действия сил притяжения.
Силы отталкивания точек друг от друга:
40
|
|
k2 |
(xi − x j |
) |
|
(DOT - dij |
), если DOT |
|
|||
ϕ x (xi , x j , yi , y j )= |
|
||||||||||
δ ij(x) |
(δ ij(x ) - Dx) |
|
- dij ³ 0 ; |
||||||||
|
|
0 – в противном случае |
|
|
|
||||||
|
|
k2 |
(yi - yj |
) |
|
(D - d |
|
) |
|
|
|
ϕ y (xi , x j , yi , y j )= |
|
|
|
|
|
||||||
δij(y ) |
(δij(y) - Dy) |
OT |
ij |
|
, если |
DOT |
- dij ³ 0 ; |
||||
0 – в противном случае
где k2- коэффициент пропорциональности;
δ ij(x) = xi − x j ; δ ij(y) = yi − y j ;
x, y- величины возможного сближения конструктивных элементов по осям X и Y ;
DOT - коэффициент, учитывающий диапазон действия сил отталкивания.
Силы отталкивания от границ платы: |
(2xi - a)2 |
|
|
|||||
|
|
|
|
|
k3 |
|
||
|
|
g x (xi )= |
|
; |
||||
|
|
(xi |
- a |
+ x *)(xi - x *) |
||||
|
|
|
|
|
||||
|
|
|
|
|
k3 |
(2yi - b)2 |
|
|
|
g y (yi ) = |
|
, |
|||||
|
(yi |
- b |
+ y *)(yi - y *) |
|||||
|
|
|
|
|
||||
где k3 - коэффициент пропорциональности.
Вычисления продолжаются до тех пор, пока будет выполняться условие:
q |
h |
|||
å |
xi(t+1) − xi(t ) |
+ å |
yi(t+1) − yi(t ) |
≤ ε |
i=1 |
|
i=1 |
|
|
где ε - допустимая погрешность нахождения оптимального решения. "Округление" полученных координат производят до ближайших целочисленных величин, соответствующих фиксированным позициям монтажного поля. Для оценки оптимальности сдвига элементов используют критерий, что и в градиентных методах.
Достоинства метода:
∙возможность получения глобального экстремума целевой функции,
∙сведение поиска к вычислительным процедурам, для которых имеются разработанные численные методы.
Недостатки:
∙трудоемкость метода и сложность его реализации /подбора коэффициентов для силовых связей;
∙необходимость фиксирования местоположения некоторого числа конструктивных элементов на плате для предотвращения большой неравномерности их размещения на отдельных участках платы.
41
24 / 25

Лекции по КТОП
Данный метод целесообразно использовать в тех случаях, когда позиции для установки элементов на коммутационной плате заранее не фиксированы, что имеет место при размещении разногабаритных элементов
Модуль может быть построен на основе программной реализации аналитических
моделей; с использованием экспертных систем; путем комбинации различных процедур, находящихся в базе данных.
Оценка проектов
Производится на основе либо аналитических моделей, либо динамических, либо экспертных систем (содержат лингвистический процессор для общения с пользователем, базу знаний, содержащую эвристические знания и интерпретатор, который на основе входных данных формирует решение задачи). Знания в экспертных системах могут быть представлены в виде семантических сетей, на основе логических подходов, на основе фреймов и продукционных правил. При разработке сложного технического объекта на первый план выступает задача комплексного проектирования, и система поддержки принятия решений берет на себя функции по стыковке между собой различных устройств и подсистем объекта. С учетом технологии параллельного проектирования, точками синхронизации процесса параллельной работы являются модули согласования проектных решений по проектам стыкуемых объектов. Если речь идет о разработке изделий электроники, то генерация возможных решений может основываться на переборе различных вариантов компоновки, заложенных в экспертную систему, варьированием значений коэффициентов уравнений и на основе комбинирования различных элементов конструкций. А моделирующие системы строятся на основе численных методов решения систем уравнений, на статистических методах обработки предыдущих проектов и на методах ситуационного моделирования.
Модуль графики
Визуализация требует достаточно серьезных графических приложений и соответственно резко увеличивает установочные требования к системе, поэтому на сегодняшний день они получили распространение в системах разработки изделий механики, в машиностроении и строительстве.
42
Лекция №9 5.12.2002г.
Структуру САПР можно представить в виде следующих модулей:
1.Модуль структурного проектирования – разработка структуры объекта.
2.Модуль схемотехнического проектирования – выбор и расчет элементов, расчет параметров.
3.Модуль конструкторского проектирования – разработка конструкции
изделия, топология.
Если речь идет о разработке изделий электроники, то представленные модули имеют следующие названия:
1.Подсистема концептуального проектирования.
2.Подсистема функционально-логического проектирования.
3.Подсистема конструкторского проектирования.
Потом идет этап технологической подготовки производства, само производство и этап испытаний.
Если речь идет о программном обеспечении – подсистемы алгоритмов, программ, автономное комплексное тестирование внешних спецификаций.
Для выполнения указанной последовательности этапов необходимы следующие подсистемные составные части:
1. Модуль групповой обработки данных – производит прогностические оценки
и совместный анализ параметров различных этапов разработки изделия.
2.Модуль генерации проектных решений – встроен во все подсистемы.
3.Модуль тестирования проектных решений.
4.Модуль согласования решений и принятия групповых решений.
5.Модуль ответственности за построение статических, аналитических и динамических моделей.
6.Модуль графики.
Групповая обработка данных
Строится на основе распределенных систем поддержки принятия решений. Основное назначение – преодоление трудностей связанных с последовательной технологией проектирования и принятия решений и переходом к параллельной технологии проектирования. Технология, базирующаяся на вычислительных сетях, обеспечивает каждого участника группы возможностью использования ЭВМ для участия в выработке решения, хотя в некоторых случаях может применяться один общий большой экран. Большинство существующих систем поддержки принятия решений базируются на двух технологиях – телекоммуникации и базы данных. Сейчас все больше появляются мультимедиа-технологии, которые позволяют использовать методы виртуальной реальности.
Генерация проектных решений
Можно подразделить на:
1.Генерация решений, основанная на типовых сценариях, по аналогии или на основе комбинаций известных частных решений (выполняется ЭВМ).
2.Генерация неожиданных решений – компьютер проводит оценку предлагаемых решений.
25 / 25