


Движение, описываемое скалярным потенциалом ϕ, представляет волну,
распространяющуюся со скоростью a =  λ +ρ2µ , а движение, описываемое векторным потенциалом Ψ - волну, распространяющуюся со скоростью
λ +ρ2µ , а движение, описываемое векторным потенциалом Ψ - волну, распространяющуюся со скоростью
b =  µρ . Чтобы решить эти уравнения, мы должны знать начальные условия,
µρ . Чтобы решить эти уравнения, мы должны знать начальные условия,
т.е. функции ϕ(x) и ψ(x) в момент t=0.
Решения уравнений (2.24) являются аддитивными, т.е. если ϕ1 и ϕ2 два различных решения волнового уравнения, то ϕ1 +ϕ2 также будет решением.
Это значит, что путем суперпозиции различных (элементарных) решений мы можем построить такое, которое удовлетворяет заданным начальным условиям. Простейшим элементарным решением волнового уравнения является решение в виде плоской волны.
2.7. Плоские волны
Рассмотрим вначале скалярное волновое уравнение
∆u = |
1 ∂2u |
(2.25) |
||
c2 |
∂t 2 |
|||
|
|
|||
u = u(x,t)
Решение уравнения (2.25) может быть представлено в следующем общем виде:
u(x,t) = f (t − (k, x)) |
(2.26) |
|
|
|
|
|
|
где f(ξ) – произвольная функция, а |
|
k |
|
2 = |
1 |
. Такое решение представляет |
|
|
|
||||||
|
|
c2 |
|||||
|
|
|
|
|
|
|
|
собой волну, распространяющуюся в направлении вектора k со скоростью с. Направление вектора k является произвольным. Очевидно, что в любой момент времени t на плоскости (k,x)=const значение функции u будет одним и тем же.
Запишем теперь решения уравнений (2.24) в виде плоских волн:
ϕ(x,t) = f (t − (k P , x)) |
|
k P |
|
2 = |
1 |
|
||||
|
|
|||||||||
|
|
a2 |
||||||||
|
|
|
|
|
|
|
|
|||
ψ(x,t) = lF(t − (k S , x)) |
|
|
k S |
|
2 = |
1 |
|
|||
|
|
|
|
|||||||
|
|
|
|
b2 |
||||||
|
|
|
|
|
|
|
|
|
||
где l – некоторый единичный вектор, имеющий произвольное направление. Тогда выражение для смещения, являющего решением уравнения движения упругой среды, может быть записано в виде
u = uP + uS
где |
|
uP = ϕ = −k P f ′(t − (k P , x)) |
(2.27) |
uS = rotψ = (l ×k S )F ′(t − (k S , x)) |
Первое слагаемое описывает волну, в которой смещение происходит в направлении вектора kP, т.е. в направлении распространения волны. Такая волна называется продольной и обозначается P. Волна, описываемая вторым слагаемым, распространяется в направлении вектора kS, а смещение в ней
30
происходит перпендикулярно направлению распространения. Такая волна называется поперечной (S). Скорость продольной волны всегда больше скорости поперечной. Характер движения в плоских продольной и поперечной волнах изображен на рис.2.6.
Рис.2.6. Движение в продольной и поперечной волнах
Решение уравнения движения в виде плоской волны можно построить, не прибегая к выражению смещений через потенциалы. Из (2.27) видно, что смещение как в продольной, так и в поперечной волне можно представить в общем виде следующим образом:
|
(n, x) |
|
||
u = lΦ t − |
|
|
( 2.28 ) |
|
c |
||||
|
|
|
||
где n и l – некоторые единичные вектора, а c – скорость распространения волны. Вектор n определяет направление распространения волны, а вектор l – направление смещения в волне, или ее поляризацию. Используя концепцию плоских волн, мы покажем, что скорость c может быть равна a или b, при этом
в случае c=a вектор поляризации l=n, а в случае c=b |
l оказывается |
ортогональным n. |
|
Действительно, подставляя представление (2.28) в уравнение движения (2.18) (считая f=0) , мы получим
[(λ + µ)n(l,n) + µl]Φ′′(t − (n, x) / c)= ρc2lΦ′′(t − (n, x) / c)
или
(λ + µ)n(l,n) = (ρc2 − µ)l |
( 2.29) |
31
Обозначим |
θ = |
|
ρc2 − µ |
, |
|
тогда (2.29) иначе можно записать в виде |
||||||||
|
|
λ + µ |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
nnT l =θ l |
|
|
|
|
|
|
(2.30) |
||||||
откуда видно, что θ и |
|
l являются соответственно собственным значением и |
||||||||||||
собственным вектором матрицы N = nnT . Матрица N имеет вид |
||||||||||||||
|
|
2 |
|
|
nx ny |
nx nz |
|
|||||||
|
nx |
|
|
|
||||||||||
N = |
n |
y |
n |
x |
|
n2 |
|
n |
y |
n |
z |
|
||
|
|
|
|
|
y |
|
|
|
|
|||||
|
n |
z |
n |
x |
n |
n |
y |
n2 |
|
|
||||
|
|
|
|
|
z |
|
|
z |
|
|
|
|||
Учитывая, что n единичный вектор, т.е. что nx2 + ny2 + nz2 =1, нетрудно показать,
что собственное значение удовлетворяет уравнению:
θ 3 −θ 2 = 0
Это уравнение имеет три корня:
θ1 =1, θ2 =θ3 = 0
Иначе
c = |
λ + 2µ |
= a, |
c |
2 |
= c |
3 |
= |
µ |
|
= b |
|
|
|
1 |
|
ρ |
|
|
|
ρ |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
||||
Собственный вектор, |
соответствующий |
первому корню, т.е. |
волне P, |
||||||||||
распространяющейся со скоростью a, |
определяется из уравнения |
|
|||||||||||
nnT l = l , |
|
|
|
|
|
|
|
|
|
|
|
|
|
и так как nT n =1, то |
легко |
|
видеть, |
что |
в этом случае l=n. Поскольку все |
||||||||
собственные векторы взаимно ортогональны, то векторы, соответствующие двум другим собственным значениям, ортогональны вектору n, т.е. направлению распространения волны, и в то же время они ортогональны между собой. Соответствующие этим корням волны распространяются с одной и той же скоростью b, но поляризованы в двух взаимно перпендикулярных направлениях. Равенство скоростей этих волн (поперечных) имеет место только в случае изотропной среды. В анизотропной среде все собственные значения оказываются различными. При этом поляризация продольной волны не совпадает с направлением распространения (поэтому такая волны называется квазипродольной), а две другие волны, поляризованные ортогонально квазипродольной волне, называются квазипоперечными, и их скорости не одинаковы.
2.8. Неоднородные плоские волны
При решении уравнения движения на основе представления (2.28) единственное предположение, которые мы делали относительно векторов l и n , было то, что эти векторы должны быть единичными, т.е.
(n,n)=1, (l,l)=1
При этом не обязательно, чтобы эти векторы были вещественными – они в общем могут быть и комплексными. Но если n является комплексным, то
аргумент функции Φ также будет комплексным, и соответственно сама функция Φ будет комплексной.
Итак, пусть n и l комплексные векторы
32
n = n1 + in2 l = l1 + il2
аргумент функции Φ является комплексным числом x+iy, и сама функция Φ также содержит вещественную и мнимую части:
Φ(x + iy) = f (x, y) + ig(x, y)
Поскольку n и l единичные векторы, мы будем иметь следующие соотношения для векторов n1 ,n2 ,l1 ,l2 :
(n1 ,n1 ) − (n2 ,n2 ) + 2i(n1 ,n2 ) =1
(n1 ,n1 ) − (n2 ,n2 ) =1 (n1 ,n2 ) = 0
(l1 ,l1 ) − (l2 ,l2 ) =1
(l1 ,l2 ) = 0
Смещение u должно быть вещественным, поэтому следует брать только вещественную часть комплексного решения:
u(x,t) = l |
|
|
(x,n |
1 |
) |
|
(x,n |
2 |
) |
− l |
|
|
(x,n |
1 |
) |
|
(x,n |
2 |
) |
|
||
1 |
f t − |
|
|
,− |
|
|
|
2 |
g t − |
|
|
,− |
|
|
|
(2.31) |
||||||
c |
|
|
c |
|
|
c |
|
|
c |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Это выражение описывает неоднородную плоскую волну. Движение в такой волне можно представить следующим образом. Смещение ведет себя во времени одинаково вдоль прямых линий, определяемых пересечением плоскостей (x,n1)=const и (x,n2)=const. Волна распространяется в направлении
|
|
|
|
c |
|
|
|
|
|
|
|
|
|
вектора n1 |
со скоростью V = |
|
|
|
|
. Поскольку n1 = 1+ |
|
n2 |
|
2 >1, скорость |
|||
|
|
|
|
|
|
||||||||
|
|
n1 |
|
|
|||||||||
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
неоднородной волны всегда меньше c (т.е. a или b). Форма волны и ее амплитуда изменяются в направлении вектора n2. Компоненты смещения вдоль векторов l1 и l2 изменяются по-разному в соответствии с функциями f и g.
Векторы l1 и l2 в продольной волне совпадают с векторами n1 и n2. В поперечной волне векторы l1 и l2 удовлетворяют соотношениям
(l1 ,n1 ) − (l2 |
,n2 ) = 0 |
(2.32) |
|
(l1 ,n2 ) + (l2 ,n1 ) = 0 |
|||
|
|||
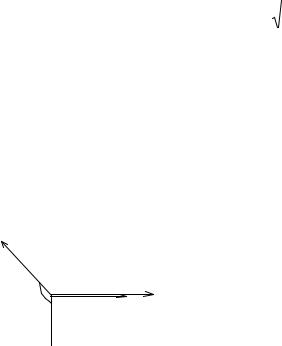
На рис.2.7 показана ориентация векторов n1 , n2 , l1 , l2 в волне S.
l1
β |
l |
n1 |
2 |
 n2
n2
Рис.2.7. Ориентация вещественной и мнимой частей векторов n и l в поперечной волне.
33
Из (2.32) следует, что
cos β = − (n1 ,l2 ) n2 
 l1
l1
Если β=π, то волна поляризована в плоскости векторов n1 , n2, так что она будет иметь продольную компоненту, т.е. в направлении распространения волны.
Такая волна называется волной SV. Случаю β=π/2 соответствует l2=0, при этом волна будет иметь только одну компоненту в направлении перпендикулярном плоскости векторов n1 , n2, т.е. она будет поляризована линейно. Такая волна называется волной SH.
Если движение в волне представляет собой гармонические колебания с круговой частотой ω, т.е. Φ(z) = Aexp(iωz) = Aexp(iωx −ωy) , то
f (x, y) = Ae−ωy cosωx
g(x, y) = Ae−ωy sinωx
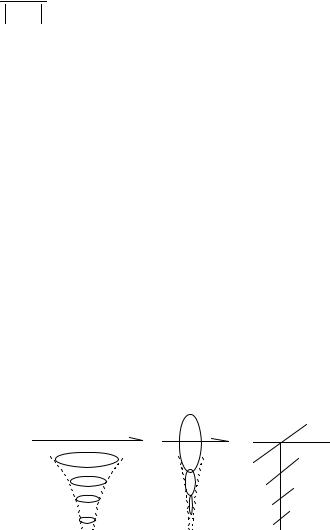
Движение частиц в неоднородной гармонической волне будет эллиптическим в P и SV волнах и линейным в SH волне (рис.2.8)
P |
SV |
SH |
Рис.2.8.
Движение частиц в волнах P. SV и SH.
В общем случае функции f(x,y), g(x,y) могут быть представлены в виде суперпозиции затухающих гармонических колебаний, т.е.
f (x, y) = ∞∫ |
A(ω)e−ωy cosωxdω |
|
0 |
(2.33) |
|
g(x, y) = ∞∫ |
||
A(ω)e−ωy sinωxdω |
||
0 |
|
Так как время t входит только в вещественную часть аргумента функций f и g, т.е. в x = t − (n1 , x) / c , то форма волны в определенной точке x определяется
как функция этого аргумента. Из (2.33) видно, что функция g как функция x (или t) является преобразованием Гильберта функции f.
34