

Анализ устойчивости по критерию Найквиста
Согласно критерию Найквиста, если система устойчива в разомкнутом состоянии, то для устойчивости соответствующей замкнутой системы необходимо и достаточно, чтобы АФЧХ разомкнутой системы при изменении частоты от 0 до ¥ не охватывала точку (—1;j0) на комплексной плоскости.
Для построения
годографа в передаточной функции
разомкнутой системы заменим S
на
 , получим:
, получим:

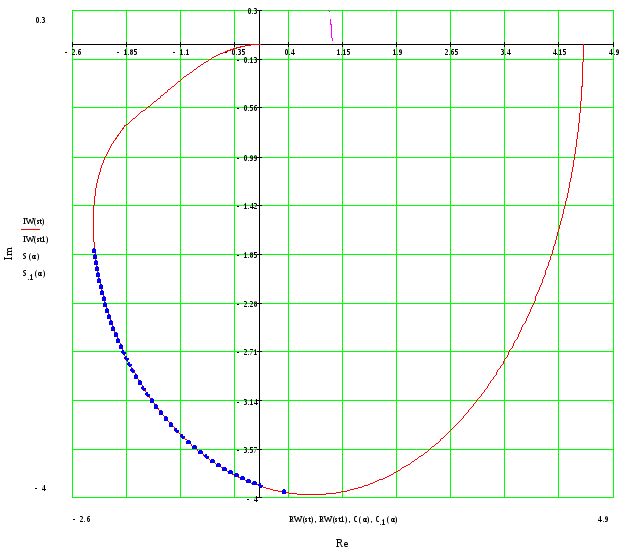
На основании того, что график не охватывает точку (-1;0) мы можем сделать вывод, что система устойчива.
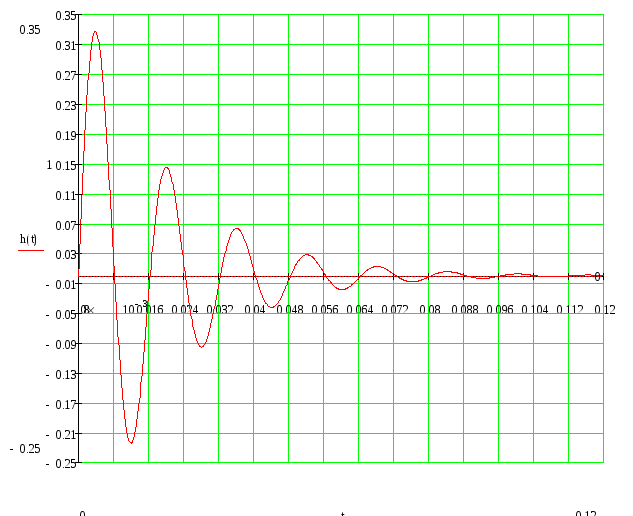
Расчёт и построение переходной характеристики нескорректированной сау
Переходная характеристика h(t) - это реакция системы на входное единичное ступенчатое воздействие при нулевых начальных условиях.
Для реальной системы переходную характеристику можно получить экспериментальным путем; при этом на вход системы следует подавать ступенчатое воздействие и фиксировать реакцию на выходе.
Для анализа и синтеза САУ в ТАУ широкое распространение при решении дифференциальных уравнений получил операторный метод. Его основным достоинством является сведение решения системы дифференциальных уравнений к решению системы нормальных алгебраических уравнений.
В ТАУ в качестве математического аппарата для анализа линейных уравнений движения систем выступает операторное преобразование Лапласа.
Преобразова́ние Лапла́са — интегральное преобразование, связывающее функцию F(s) комплексного переменного (изображение) с функцией f(x) действительного переменного (оригинал).
Подадим на вход системы единичное ступенчатое управляющее воздействие и произведём обратное преобразование Лапласа с помощью встроенных средств MathCAD:
h(t)=
 =
=
Синтез корректирующего звена
Корректирующие звенья – динамические звенья с определенными передаточными функциями. Термин “корректирующие звенья” используется для звеньев, вводимых как для изменения динамических свойств, так и для изменения статических свойств системы. Звенья, использующиеся для повышения запаса устойчивости (динамические свойства), называют иногда демпфирующими, или стабилизирующими. При этом имеется в виду, что эти звенья демпфируют (гасят) колебания, которые возникают в системе регулирования.
Построим на одной плоскости ЛАХ нескорректированной САУ, желаемую ЛАХ и получим ЛАХ регулятора:
![]()
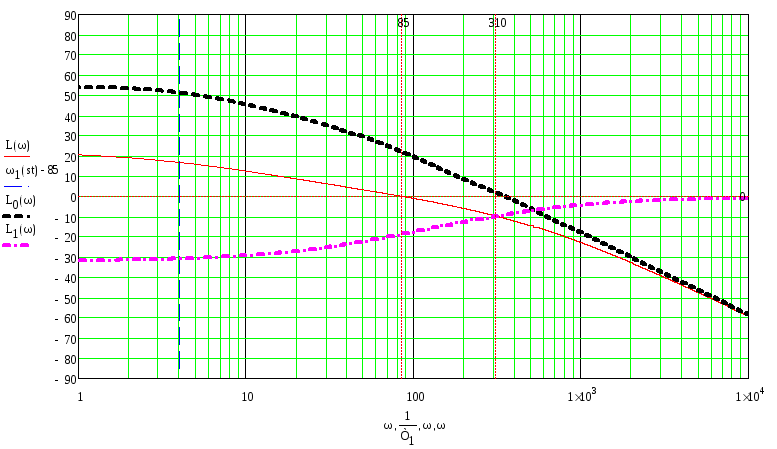
Включаем регулятор последовательно с замкнутой системой.
W(P)= -реальное
звено. Тр+1 – инерционная часть.
Последовательная добавка такого звена
в контур системы позволяет повысить
точность установившегося режима, т.к.это
звено воздействует на низкочастотный
участок системы. Включение этого звена
позволяет снизить статическую ошибку
системы ПИД-звено – фильтр низкой и
высокой частоты. Изменяя К, мы приподнимаем
второй участок графика или опускаем
его. Введение этого звена приводит к
повышению точности, расширению полосы
пропускания, улучшению динамических
свойств. ПИД-звено позволяет корректировать
одновременно низкочастотный участок
ЛАХ (повышается точность системы) и
среднечастотный участок (улучшение
динамических свойств). В промышленности
выпускаются звенья для решения задач
синтеза систем в виде ПИ, ПД и
ПИД-регуляторов.
-реальное
звено. Тр+1 – инерционная часть.
Последовательная добавка такого звена
в контур системы позволяет повысить
точность установившегося режима, т.к.это
звено воздействует на низкочастотный
участок системы. Включение этого звена
позволяет снизить статическую ошибку
системы ПИД-звено – фильтр низкой и
высокой частоты. Изменяя К, мы приподнимаем
второй участок графика или опускаем
его. Введение этого звена приводит к
повышению точности, расширению полосы
пропускания, улучшению динамических
свойств. ПИД-звено позволяет корректировать
одновременно низкочастотный участок
ЛАХ (повышается точность системы) и
среднечастотный участок (улучшение
динамических свойств). В промышленности
выпускаются звенья для решения задач
синтеза систем в виде ПИ, ПД и
ПИД-регуляторов.