

10.2. Основные сведения теории графов
Если граф G (рис.1) задается множеством Х точек или вершин x1 , x2 , ..., xn и множеством А линий или ребер a1 , a2 , ..., am , соединяющих все или часть этих точек, то считают, что граф полностью задается парой (X, А).
Если ребра из множества А ориентированы, что показывается стрелкой, та они называются дугами (дуга от вершины xi к вершине xj обозначается а = (xi , xj)) и граф называется ориентированным графом (орграфом) (рис.1). Если ребра не имеют ориентации, то граф называется неориентированным графом (неографом).
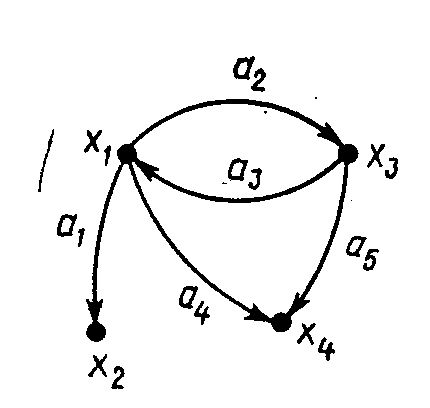
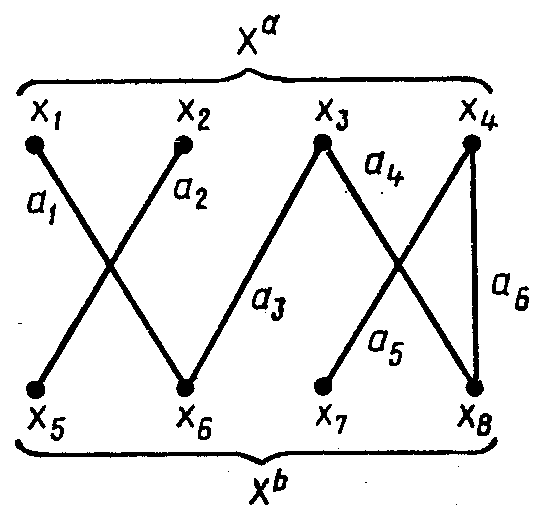
Рис.1. Ориентированный граф Рис.2. Двудольный граф
Ребра а = (xi , xj), xi xj , имеющие общую концевую вершину, называются смежными. Две вершины называются смежными, если существует хотя бы одно ребро, соединяющее эти вершины.
Ребро а = (xi , xj) инцидентно вершинам xi , xj и, наоборот, вершины xi , xj инциденты ребру а. Число ребер, инцидентных вершине xi, называется степенью вершины. Графы, для которых сохраняется отношение инцидентности, называются изоморфными графами.
Если ребрам графа G сопоставляются числа, т. е. ребру (xi , xj) ставится в соответствие некоторое число сij , называемое весом ребра, то граф G называется графом со взвешенными ребрами. Иногда веса приписываются вершинам, тогда граф называется графом со взвешенными вершинами. Если веса приписаны и ребрам и вершинам, то граф называется взвешенным графом.
Граф G = (X, А), у которого существует хотя бы одна пара вершин, соединяемых т ребрами (m > 1), называется мультиграфом. Ребра, связывающие одну и ту же пару вершин, называются кратными ребрами.
Граф G = (X, А) называют полным графом, если для любой пары вершин xi и xj во множестве Х существует по крайней мере одно ребро, связывающее их.
Граф G = (X, А) называется двудольным графом (биграфом), если множество его вершин Х может быть разбито на такие два подмножества Хa и Xb, что каждое ребро имеет один конец в подмножестве Хa, а другой — в подмножестве Xb (рис.2).
Граф называется планарным графом, если его можно изобразить на плоскости так, что никакие два его ребра не пересекаются.
Плоский граф — граф, изображенный на плоскости без пересечения ребер.
Пространственный граф — граф, изображенный в трехмерном пространстве.
Подграфом графа G = (X, А) называется граф G' = (X', А'), для которого А' с А и X' с X.
Суграфом графа G = (X, А) называется граф G' = (X, А'), для которого А' с А.
Пусть G = (X, А) — неориентированный граф без петель (ребер (xi , xi)) и кратных ребер. Маршрутом s в графе G называется последовательность ребер, в которой пары соседних ребер ai, ai+1 (i = 1,2, ..., n -1) — смежные (n — длина маршрута). Маршрут s, в котором нет повторяющихся ребер, — цепь. Если в некоторой цепи совпадают начальная и конечная вершины, то такая цепь называется циклом с. Цикл будет простым, если у него нет повторяющихся вершин, и сложным в противном случае. Цикл сэ, в котором содержатся все ребра графа, называется эйлеровым. Цикл сг, проходящий через каждую вершину графа G по одному разу, называется гамильтоновым.
Связный граф — граф, в котором две любые вершины можно соединить цепью. Связный граф без циклов называется деревом Т. Множество деревьев графа G называется лесом. В дереве любые две вершины связаны единственной цепью.