3. Табулированная функция.
Как правило, это средство является способом задания сложных кривых.
Схема формирования изображения.
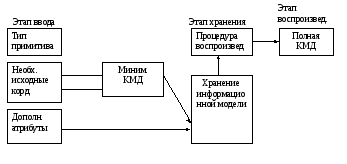
Миним. КМД – минимальная корд. модель- минимальный набор, необходимый для задания изображения ( для линии – х,у, для окружности- 3 точки или центр и радиус).
8.4. Примеры вычислительной геометрии.
Методы ВГ позволяют использовать аналитику для преобразования, хранения и воспроизведения различных геометрических объектов вычислительными методами.
Прямая.
1.Аналитическое уравнение прямой.
![]() ,
,
![]()
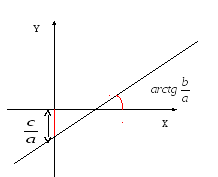
если
а=0, тогда
![]() ,
что непонятно и сложно для ЭВМ. Здесь
нет закона, позволяющего построить
каждую точку для получения полной КМД.
,
что непонятно и сложно для ЭВМ. Здесь
нет закона, позволяющего построить
каждую точку для получения полной КМД.
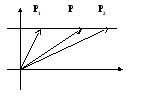
2.Параметрическое уравнение прямой.
Пусть
прямая проходит через две точки P1
и P2
. Каждая из этих точек в ДСК задаётся с
помощью своего радиус- вектора
![]() .Прямая
представляет из себя множество точек.
Произвольная точка P, принадлежащая
нашей прямой будет задаваться с помощью
радиус-вектора
.Прямая
представляет из себя множество точек.
Произвольная точка P, принадлежащая
нашей прямой будет задаваться с помощью
радиус-вектора![]() .
.
![]() Здесь
положение вектора
Здесь
положение вектора![]() для воспроизведения текущей точки
определяется неким коэффициентом
пропорциональности
для воспроизведения текущей точки
определяется неким коэффициентом
пропорциональности![]() ,
который показывает перемещение вектора
,
который показывает перемещение вектора![]() .Видно, что при
.Видно, что при![]() попадаем в точкуP1
(вектор
попадаем в точкуP1
(вектор
![]() совпадает с вектором
совпадает с вектором![]() ),
а при
),
а при![]() попадаем в точкуP2
попадаем в точкуP2
Т.о.
![]()
Используется линейное приращение, можно воспроизвести все точки прямой.
Определить пересечение двух прямых в 3-D пространстве.
1-я прямая проходит через точки: M1(1,1,1) ; M2(2,3,4)
2-я прямая проходит через точки : N1(1,2,3) ; N2(-2,-3,-4)
Запишем параметрическое уравнение для каждой прямой:
![]() :
:
![]()
![]()
В декартовых координатах прямые:
Условие пересечения 2-х прямых предполагает наличие одной общей точки. Приравниваем выражения для соответствующих координат:
Решение
сводится к нахождению 2-х линейно-независимых
уравнений, их решению относительно
неизвестных и проверке третьего
(подстановкой). Выразим из 1-го уравнения
![]() Подставим полученное выражение в 3-е
уравнение:
Подставим полученное выражение в 3-е
уравнение:
![]() ,
соответственно
,
соответственно
![]() .
.
Для
проверки подставляем
![]() во 2-е уравнение:
во 2-е уравнение:
1+6=2+5
Полученные
параметры
![]() подставим в уравнения и при условии
равенства координат в обоих уравнениях
получим точки пересечения:
подставим в уравнения и при условии
равенства координат в обоих уравнениях
получим точки пересечения:
-2(1,1,1)+3(2,3,4) = (4,7,10)
2(1,2,3)+(-1)(-2,-3,-4)= (4,7,10)
Прямые пересекаются.
8.5. Преобразования координат в 2d пространстве.
Независимо от выбранного метода проектирования при помощи ЭВМ необходимо иметь в памяти ЭВМ численные данные, описывающие проектируемый объект в некоторой системе (или системах) координат. Если же отдельные части конструкции описываются в различных системах координат, то в памяти машины необходимо иметь данные, описывающие соотношения между выбранными системами координат, с тем чтобы определить относительное положение и ориентацию частей объекта. Эти соотношения, описывающие переход от одной системы координат к другой, называются преобразованиями координат.
В процессе проектирования на любой его стадии может возникнуть необходимость изучения проекта, для чего выполняются чертежи проекции или поперечных сечений проектируемого объекта. Для наглядности чертежи могут быть сделаны в перспективе. Все эти чертежи получаются преобразованием координат объекта в координаты чертежа.
Перед запуском готового проекта в производство система координат, в которой данный проект был выполнен, должна быть соотнесена с системой координат станка; т.о., и на этой стадии необходимо преобразование координат.
Если же проект обладает той или иной симметрией, то в памяти машины достаточно иметь данные, описывающие лишь часть проекта, поскольку чертеж полной конструкции на основании симметрии можно получить при помощи вращений, сдвигов и отражений. Выполняемые в данном случае преобразования являются преобразованиями объектов и совершенно не влияют на систему координат, в которой данный предмет был изображен.
В основе преобразования координат лежат 3 основные формы изменения координатной модели (переход от заданной системы координат к системе координат наблюдателя):
перенос;
изменение масштаба;
поворот осей координат.
Как правило, принято, что само пространство не изменяется, и положение объекта мы считаем неизменным, меняется координатная система наблюдателя.
Перенос.
Если
идет речь о переносе объекта, то связь
между радиус-вектором r/
перемещенной точки и ее первоначальным
положением устанавливается соотношением:
![]() где t - вектор перемещения каждой точки
рассматриваемого объекта.
где t - вектор перемещения каждой точки
рассматриваемого объекта.
Если
же переносятся оси координат, а объект
фиксирован, тогда связь между координатами
новой системы координат O/x/y/
и координатами старой системы Oxy
задается соотношениями:
![]() ,
где (t,к)
координаты начала новой с.к. относительно
старой с.к.
,
где (t,к)
координаты начала новой с.к. относительно
старой с.к.
Если новое начало соответствует некоторой точке в старой с.к с координатами О/(t;k). Тогда некоторая точка К(х;у) из прежней системы координат в новой будет выглядеть как К(х-t,y-k).
Например, если начало новой с.к. лежит в т.О/(4,6), а т.К в старой с.к. имеет координаты (3,3), тогда в новой с.к. т.К(3-4,3-6), т.е. К(-1,-3).
2)Изменение масштаба.
Новая и старая с.к. имеют одно начало координат, но различные масштабы по осям. Отрезок в одну единицу по оси абсцисс будет соответствовать в новой системе Sx, по оси Y будет соответствовать Sy. Тем самым меняется масштаб точки, т.е ее удаленность от начала координат.
3)Поворот осей координат.
O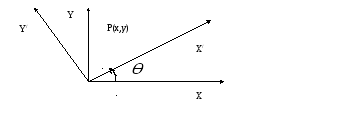
Пусть
новая и старая с.к. имеют общее начало
и масштаб. Новая с.к повернута относительно
старой против часовой стрелки на угол
![]() .
Пусть в старой с.к задана т.Р(х;у). Выразим
ее координаты в новой с.к через известные
координаты:
.
Пусть в старой с.к задана т.Р(х;у). Выразим
ее координаты в новой с.к через известные
координаты:
![]()
Полное преобразование координат производится строго в определенной последовательности:
Перенос в начало координат;
Поворот осей;
Изменение масштаба.
Пример.
Пусть на плоскости задан отрезок прямой АВ: А(3,2) и В(-1,-1). Что произойдет с отрезком при полной смене координат наблюдателя, если: 1) начало координат переносится в точку (1,0);
2)
произойдет поворот осей на угол
![]()
3) изменение масштаба по оси Х вдвое.
Решение:
в новой с.к. отрезок будет иметь следующие координаты: А(3-1, 2-0) и В(-1-1, -1-0), т.е А(2,2) и В(-2, -1);
при повороте осей в новой с.к:
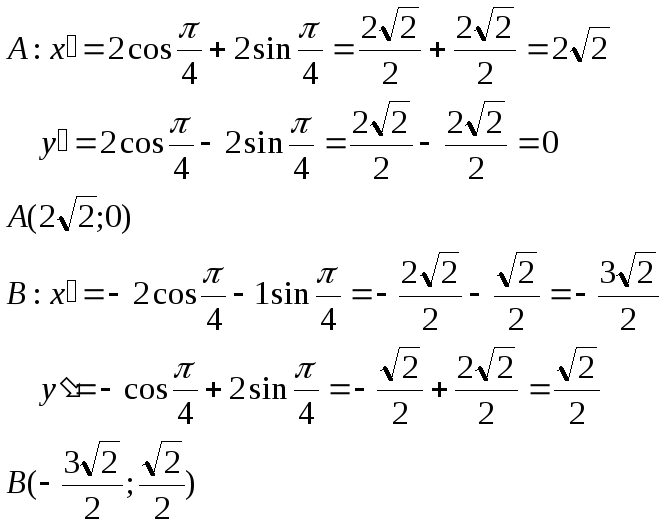
изменение масштаба, Sx=2