

3. Статическийрасчет автоматизированных электроприводов
Статический расчет сводится к составлению блок-схемы электропривода и выбору основных элементов системы, которые должны обеспечивать регулирование выходных координат (скорости, момента) с требуемой точностью и в требуемом диапазоне регулирования. Без применения обратных связей нельзя обеспечить современные требования по точности регулирования. Поэтому для регулирования выходных координат электропривода используют обратные связи по скорости, напряжению и току, а также их различные комбинации. Так, например, для стабилизации скорости двигателя применяют отрицательные обратные связи по скорости или напряжению и положительную (слабую) связь по току. Для стабилизации момента двигателя применяется отрицательная связь по току (моменту) и положительные связи по скорости или напряжению.
При регулировании двух или нескольких координат электропривода обычно используют схемы с общим усилителем и схемы с общим усилителем и нелинейными обратными связями.
Ниже приведены уравнения, позволяющие построить электромеханические характеристики электропривода, и формулы для вычисления требуемого коэффициента усиления усилителя, обеспечивающего заданную точность и диапазон регулирования при различных видах обратных связей.
3.1. Системы стабилизации скорости электропривода постоянного тока с усилителем
В электроприводах постоянного тока получила распространение статическая система стабилизации скорости двигателя постоянного тока при изменении нагрузки на его валу, обеспечивая регулирование скорости и ее стабилизацию с высокой точностью.
В общем случае функциональная схема такой системы имеет вид, показанный на рис.3.1. Она содержит двигатель М, преобразователь U, промежуточный усилитель А, элемент сравнения AW (сумматор) и обратную связь, в которую могут входить датчик тока UA, датчик напряжения UU, датчик скорости (частота вращения ) BR или различные комбинации из этих датчиков.
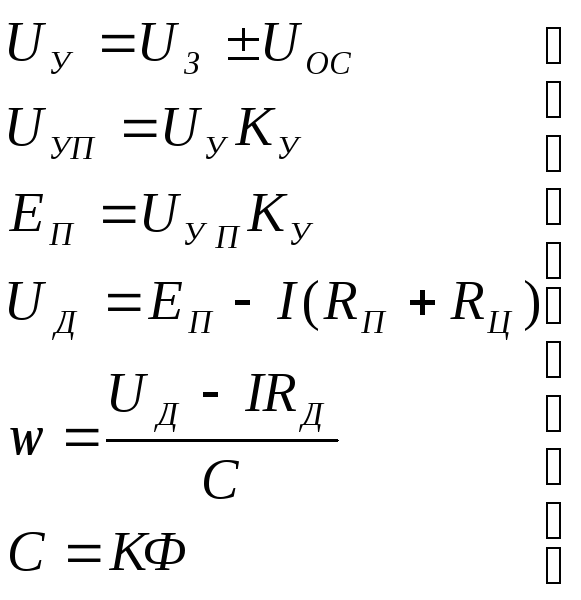
Работа электропривода в установившихся режимах при постоянном магнитном потоке двигателя описывается системой уравнений [5]:
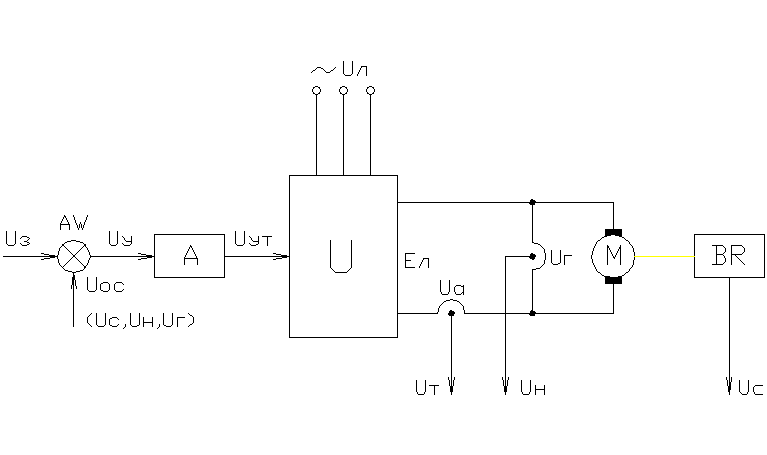
Рис.3.1. Функциональная схема электропривод постоянного тока
 , (3.1.),
гдеUЗ,UOC,UУ,UУП,UД–
напряжение: задающее, обратной связи,
управления системы, управления
преобразователем, на двигателе;
, (3.1.),
гдеUЗ,UOC,UУ,UУП,UД–
напряжение: задающее, обратной связи,
управления системы, управления
преобразователем, на двигателе;
EП – ЭДС преобразователя; w – угловая скорость вращения двигателя; I – ток двигателя; КУ, КП – коэффициенты усиления промежуточного усилителя и преобразователя; RП, RД, RЦ – сопротивления: преобразователя, двигателя и цепи, соединяющей двигатель с преобразователем; К, Ф – конструктивная постоянная и магнитный поток двигателя.
Напряжение обратной связи UОС в зависимости от вида применяемой обратной связи определяется зависимостями:
UОС=КСw;
UОС=КНUД;
UОС=КТI
или их комбинация, где КС, КН, КТ – коэффициенты обратных связей по скорости, напряжению и току.
3.1.1. Система стабилизации скорости с обратной связью по скорости и положительной обратной связью по току.
Для рассматриваемого случая уравнение для UУ в системе уравнений (3.1) необходимо записать в виде
UУ=UЗ-КСw+КТI
Решая систему уравнений (3.1) относительно угловой скорости вращения w, получим:
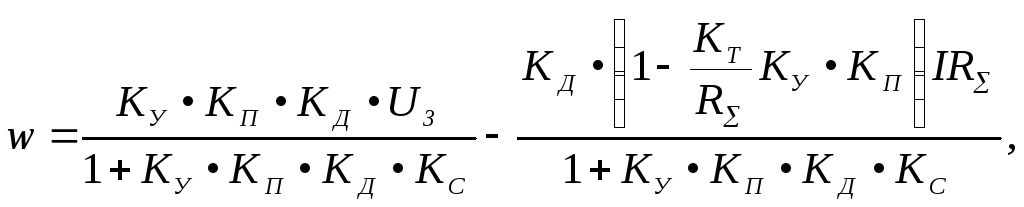 (3.2)
(3.2)
где
![]() -
полное сопротивление силовой цепи
электропривода;
-
полное сопротивление силовой цепи
электропривода;
![]() - статический
коэффициент передачи двигателя.
- статический
коэффициент передачи двигателя.
Уравнения электромеханической характеристики системы с каждой из обратных связей можно получить из общего уравнения, приравнивая к нулю коэффициенты отсутствующих связей.
Второе слагаемое в уравнении (3.2) является перепадом угловой скорости под действием нагрузки и характеризует уровень ошибки стабилизации скорости в замкнутой системе:
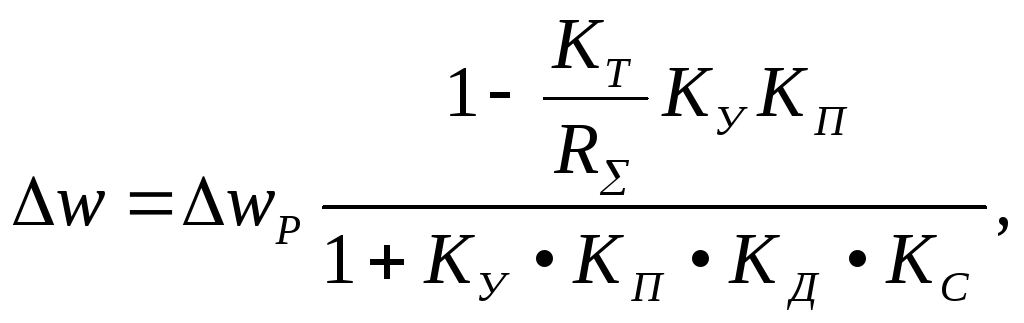 (3.3)
(3.3)
где
![]() -
ошибка разомкнутой системы (без обратных
связей).
-
ошибка разомкнутой системы (без обратных
связей).
Ошибка в замкнутой системе электропривода зависит от значений коэффициентов обратных связей и коэффициентов усиления преобразователя и усилителя тем меньше, чем больше значения указанных коэффициентов.
Коэффициенты обратных связей определяются возможностями датчиков и верхним уровнем задающего напряжения. Коэффициент усиления преобразователя зависит от свойств преобразователя и при выбранном преобразователе бывает известным. Коэффициент усиления усилителя определяется по требуемой точности (статизму) системы.
Для рассматриваемого случая требуемый коэффициент усиления определяется из уравнения (3.3)
 ,
,
где
![]() -
допустимая ошибка замкнутой системы.
-
допустимая ошибка замкнутой системы.
В требованиях к
электроприводам обычно задается статизм
по отношению к скорости идеального
холостого хода, т.е. ошибка в относительных
единицах или процентах,
![]() ,
и диапазон регулирования скоростиD,
который определяется как отношение
максимальной и минимальной скорости
идеального холостого хода:
,
и диапазон регулирования скоростиD,
который определяется как отношение
максимальной и минимальной скорости
идеального холостого хода:
![]() или
или ![]()
Требуемый коэффициент усиления усилителя
 (3.4)
(3.4)
где
![]() -
статизм разомкнутой системы по отношению
к максимальной скорости идеального
холостого хода;
-
статизм разомкнутой системы по отношению
к максимальной скорости идеального
холостого хода;
![]() - заданный статизм
(требуемая точность регулирования)
- заданный статизм
(требуемая точность регулирования)
Регулирование скорости двигателя в заданном диапазоне осуществляется изменением задающего сигнала UЗ. Значения UЗ зависят от коэффициентов обратных связей и коэффициентов усиления преобразователя и усилителя. Определяется UЗ обычно из уравнения электромеханической характеристики (3.2) при идеальном холостом ходе двигателя (первое слагаемое). Уравнение UЗ при действии отрицательной обратной связи по скорости и положительной по току имеет вид:
![]() (3.5)
(3.5)
Из комбинированных связей распространение получили комбинации отрицательной связи по скорости и положительной по току (рассмотренный случай) и отрицательной связи по напряжению и положительной по току. При этом связь по напряжению (или скорости) делается сильной, а связь по току – слабой. Поэтому на верхних скоростях диапазона, где статизм небольшой, действие токовой связи слабое, а на нижних скоростях, когда напряжение на якоре двигателя снижено, основную роль играет связь по току, которая и повышает точность регулирования.
В техническом задании на проектирование автоматизированного электропривода иногда задается требуемая точность регулирования, а не требуемый статизм. В этом случае ошибка замкнутой системы на нижнем пределе диапазона регулирования должна быть меньше или равна требуемой ошибке регулирования.
Ошибка электропривода
![]() определяется ошибкой от действия
нагрузки (статизма)
определяется ошибкой от действия
нагрузки (статизма)![]() и ошибкой датчика обратной связи
и ошибкой датчика обратной связи![]() ,
т.е.
,
т.е.
![]() ,
,
отсюда
![]() ,
где
,
где
![]() - требуемый статизм.
- требуемый статизм.
Обычно
![]()