

Тольяттинский Государственный Университет
Кафедра «НМиМ»
РАСЧЕТНО-ПОЯСНИТЕЛЬНАЯ ЗАПИСКА К КУРСОВОМУ ПРОЕКТУ
по дисциплине «МЕХАНИКА»
Студентка: Тутукова К.В.
Группа: ЗОСб-1201
Преподаватель: Сорока И.В.
2014-2015 Содержание
|
1. Кинематическое исследование рычажного механизма 1.1 Структурный анализ механизма………………………………………. |
4 |
|
1.2 Построение схемы механизма в масштабе…………………………… |
4 |
|
1.3 Построение планов скоростей………………………………………… |
5 |
|
1.4 Построение планов ускорений………………………………………... |
5 |
|
1.5 Построение кинематических диаграмм ползуна…………………….. |
6 |
|
1.6 Сравнительный анализ………………………………………………… |
7 |
|
|
|
|
2. Синтез кулачкового механизма 2.1 Построение кинематических диаграмм толкателя…………………... |
11 |
|
2.2 Определение минимального радиуса кулачковой шайбы…………... |
12 |
|
2.3 Построение профиля кулачка…………………………………………. |
12 |
|
|
|
|
3. Редуктор |
|
|
|
|
|
|
|
|
|
|
|
Список использованной литературы……………………………... 35 |
|
Кинематический анализ рычажного механизма.
1.1 Структурный анализ механизма
Данный механизм является кривошипно–ползунным механизмом (рис.1)
Кинематическая схема механизма
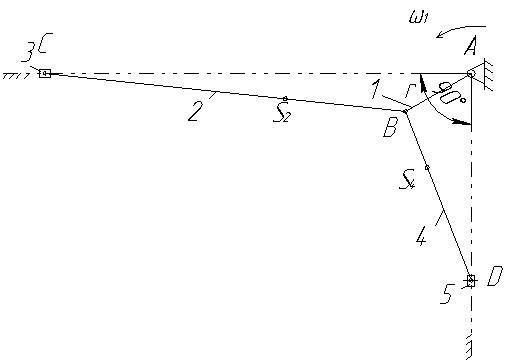
Рис.1. Кривошипно–ползунный механизм.
Звено 1 – кривошип, звенья 2 и 4 – шатуны, звенья 3 и 5 – ползуны.
В механизме семь кинематических пар, характеристики которых
приведены в таблице 1.
Характеристика кинематических пар
Таблица 1
|
Обозначение Пары |
Подвижность пары (одноподвижная или двухподвижная) |
Звенья, образующие пару |
Какая пара высшая, какая низшая, вращательная или поступательная |
|
|
Одноподвижная |
Стойка и кривошип |
Низшая пара, вращательная |
|
|
Одноподвижная |
Ползун и направляющая |
Низшая пара, поступательная |
|
|
Одноподвижная |
Ползун и направляющая |
Низшая пара, поступательная |
|
|
Одноподвижная |
Кривошип и шатун |
Низшая пара, вращательная |
|
|
Одноподвижная |
Кривошип и шатун |
Низшая пара, вращательная |
|
|
Одноподвижная |
Шатун и ползун
|
Низшая пара, вращательная |
|
|
Одноподвижная |
Шатун и ползун
|
Низшая пара, вращательная |

Степень подвижности механизма определяется по формуле:
W=
3n
- 2p![]() - p
- p![]()
где, n - число подвижных звеньев
p![]() - количество одноподвижных кинематических
пар в механизме
- количество одноподвижных кинематических
пар в механизме
p![]() -
количество двухподвижных кинематических
пар в механизме
-
количество двухподвижных кинематических
пар в механизме
![]()
Следовательно, ведущему достаточно задать одно движение, чтобы определить движение всех остальных звеньев.
1.2 Построение планов положений механизма
а) Определение масштабного коэффициента
![]()
принимая длину кривошипа на чертеже 20 мм рассчитаем:
![]()
б) Определение длины шатунов
Изображаем чертеж механизма в масштабе и двенадцать положений механизма.
Траекторию кривошипа разбиваем на 12 равных частей, положению ползуна в нижний мертвой точке даем значение 0, остальные нумеруем в сторону против часовой стрелки вращение кривошипа.
Обозначаем центры тяжести шатунов на расстоянии 1/3 длины шатуна от точки В.