

Параллельные корректирующие звенья. Жесткие корректирующие обратные связи

Рисунок 8.10 Эквивалентная алгоритмическая схема параллельной коррекции
Корректирующие обратные связи делятся на отрицательные и положительные, на жесткие и гибкие.
Жесткая обратная связь осуществляется усилительным звеном, т.е. Wос(0)0 при p=0.
Гибкая обратная связь осуществляется дифференцирующим звеном, т.е. Wос(0)=0.
В статике сигнал гибкой обратной связи отсутствует. Она действует только в динамике.
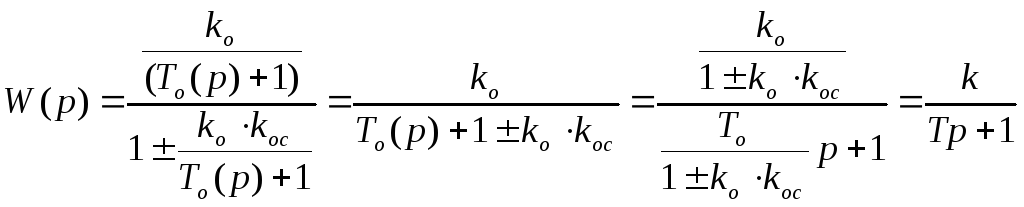
Идеальная жесткая обратная связь Wос=kос.
Рассмотрим охват такой обратной связью
простого статического звена с![]() :
:
 (8.9)
(8.9)
![]() (8.10)
(8.10)
Охват статического звена жесткой обратной связью изменяет kиТ в(1kokoc) раз, т.е. они уменьшаются при отрицательной обратной связи и увеличиваются при положительной обратной связи.
Покажем, как изменяется переходная функция h(t)при отрицательной обратной связи (рисунок 8.11).
Для кривой
![]() - величина на входе звенаWо
Xвх(t)имеет всплеск. За
счет этого всплеска и происходит
форсировка на входе, что дает ускорение
переходного процесса.
- величина на входе звенаWо
Xвх(t)имеет всплеск. За
счет этого всплеска и происходит
форсировка на входе, что дает ускорение
переходного процесса.
Для коррекции переходных процессов, т.е. для уменьшения инерционности, в основном применяется отрицательная обратная связь. Кроме этого отрицательная обратная связь:
Уменьшает нелинейность статической характеристики звена.
Уменьшает нестабильность параметров звена во времени.
Уменьшает величину шумов на выходе.
Повышает устойчивость.

Рисунок 8.11 Переходная функция в случае отрицательной обратной связи
Также действует жесткая обратная связь и на звено более высокого порядка.
Интересен случай охвата жесткой обратной
связью интегрирующего звена с
![]() .
.
 , (8.11)
, (8.11)
т.е. получили статическое звено, где
![]() ;
;![]() .
.
При охвате интегрирующего звена жесткой обратной связью оно превращается в апериодическое звено. Практически важна здесь отрицательная обратная связь. Эта связь широко применяется для снижения порядка статизма и для улучшения устойчивости и качества переходного процесса.
Гибкие обратные связи
Идеальная гибкая обратная связь.
В качестве корректирующего звена выберем идеальное дифференцирующее звено.
![]() .
.
Пусть охваченное звено имеет:
![]() ,
,
тогда:
 .
(8.12)
.
(8.12)
Гибкая обратная связь не влияет на коэффициент передачи охватываемого звена и изменяет коэффициент при рв знаменателе передаточной функцииW.
Рассмотрим пример 1:
![]()
![]()
где
![]() .
.
Постоянная времени Т изменилась на kokoc.
При отрицательной обратной связи Т увеличивается.
При положительной обратной связи Т уменьшается.
Таким образом, гибкая обратная связь изменяет быстродействие без изменения коэффициента передачи звена.
В звене второго порядка гибкая обратная связь сильно уменьшает коэффициент передачи.
Положительная гибкая обратная связь форсирует переходный процесс, как при возрастании, так и при снижении выходного сигнала САР.
Рассмотрим пример 2:
Охват дифференцирующей связью с
![]() интегрирующего звена с
интегрирующего звена с![]() .
.
 , (8.13)
, (8.13)
где
![]() .
.
Гибкая обратная связь изменяет коэффициент передачи, не меняя типа звена.
Гибкая обратная связь по ускорению.
![]() (8.14)
(8.14)
 . (8.15)
. (8.15)
Такая обратная связь изменяет коэффициент при p2. Эта связь применяется для систем 2-го и более высокого порядка.
Гибкая инерционная обратная связь.
Реальное дифференцирующее звено:
![]() .
(8.16)
.
(8.16)
Если такой обратной связью охватить интегрирующее звено, то процесс действия обратной связи можно объяснить так.
Начало переходного процесса. Скорость
изменения y(t)велика и в Wосможно пренебречь,![]() .
.
В начале переходного процесса гибкая инерционная обратная связь ведет себя как жесткая обратная связь, а охваченное ей интегрирующее звено превращается в апериодическое.
При этом можно повысить быстродействие в начале переходного процесса увеличением коэффициента передачи.
Вторая половина переходного процесса. Постепенно по мере замедления переходного процесса Хосспадает до нуля (действует числительWос) и интегрирующее звено начинает вести себя как звено без обратной связи. В статике обеспечивается астатизм системы (ошибка = 0).