

В.А. Старовойтов Технические средства автоматизации. Программа, методические указания, контрольные задания и курсовая работа
.pdf10
выходной сигнал аналоговых пневморегуляторов (устройств регулирования) предназначен для непрерывного воздействия на исполнительный механизм обычно мембранного типа или же другой элемент системы регулирования, например, другого регулятора в каскадной схеме.
Регуляторы прямого действия автономны и не могут быть использованы в системах централизованного управления.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Объясните назначение и устройство выключающего реле в пневматических регуляторах.
2.Приведите пример программного регулирующего устройства и объясните принцип его действия.
3.В чем состоят преимущества микропроцессорных контроллеров перед электронными регуляторами аппаратного типа ?
4.В чем заключается многофункциональность регулирующих приборов (блоков) аппаратного типа?
5.Объясните принцип действия трехпозиционного регулирующего устройства измерительного прибора одного из типов КС, КМ, КП,
ДИСК-250, РП-160, А-500.
6.Объясните устройство одного из регуляторов температуры прямого действия.
7.Каким образом осуществляется настройка известных вам регуляторов и оперативное управление исполнительными механизмами?
8.Объясните устройство и принцип действия датчика-реле уров-
ня.
9.В чем отличие микропроцессора от микроЭВМ ?
10.Каковы назначения и принципы построения регулирующих микропроцессорных контроллеров ?
Тема 5. УСТРОЙСТВА ИСПОЛЬЗОВАНИЯ КОМАНДНОЙ ИНФОРМАЦИИ НА ОБЪЕКТЕ УПРАВЛЕНИЯ
Исполнительные устройства: назначение, классификация и области применения, выбор (1, с. 247-256).
Электрические исполнительные механизмы одно- и многооборот-
ные прямоходовые (1, с. 66-73; 2, с. 188-204; 7, с. 716-729).
11
Промышленная трубопроводная арматура с электрическим управлением и вспомогательная аппаратура (7, с. 730-753).
Пневматические исполнительные механизмы (1, с. 101-103; 6,
с. 158-160; 7, с. 753-764; 8, с. 242-248).
Промышленная трубопроводная арматура с пневмоприводом (7,
с. 766-784).
Гидравлические исполнительные механизмы (7, с. 784-788; 8,
с. 254-255).
Гидро- и электромагнитные муфты (1, с. 73-75; 2, с. 191-194). Усилители мощности: магнитные (1, с. 79-86; 2, с. 97-116), тири-
сторные (2, с. 117-128).
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
Командная информация, являющаяся в системах автоматического управления выходным сигналом управляющих устройств (регуляторов, микропроцессорных контроллеров, УВМ и др.), подается на исполнительные устройства (ИУ), которые и вырабатывают собственно управляющие воздействия, прикладываемые ко входу объекта. Именно эти воздействия позволяют изменять величину электроэнергии или расход материальных потоков, обеспечивая достижение цели управления.
Исполнительное устройство состоит из двух основных функционально связанных блоков: исполнительного механизма (ИМ) и регулирующего органа (РО), которые в специальной литературе могут рассматриваться раздельно. Получившие большое распространение РО дроссельного типа, выпускаемые промышленностью комплектно с пневмо-, гидроили электроприводом, рассматриваются в справочной литературе как трубопроводная арматура с механическим приводом.
В качестве ИУ для регулирования потоков сыпучих сред применяются различного рода питатели. Исполнительными устройствами в системах с электрообогревом могут служить тандемы: нагревательмагнитный пускатель; нагреватель-тиристорный преобразователь и т.д.
Так как ИУ являются одним из звеньев АСР (оконечным и самым мощным), то их правильный выбор не менее важен, чем выбор других элементов системы.
12
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Каковы основные характеристики регулирующего органа дроссельного типа ?
2.Поясните принцип действия пневматических мембранных исполнительных механизмов на примерах нормально открытого и закрытого регулирующих клапанов.
3.Назовите основные элементы электрических исполнительных механизмов.
4.Каковы достоинства и недостатки трубопроводной арматуры с электромагнитным приводом ?
5.Объясните принцип действия электрического ИМ переменной скорости.
6.Объясните устройство и принцип действия электромагнитных муфт вязкого трения.
7.Каким требованиям должен отвечать ИМ постоянного и переменного тока ?
Тема 6. СРЕДСТВА ПРИЕМА, ПРЕОБРАЗОВАНИЯ И ПЕРЕДАЧИ ИНФОРМАЦИИ
Преобразователи сигналов и кодов: электропневматические и пневмоэлектрические (5, с. 110-111; 6, с.52; 7, с. 598-603), аналогоцифровые и цифро-аналоговые (2, с. 87-91; 9, с. 328-334).
Устройства для дистанционной передачи аналоговых сигналов (2,
с. 34-38; 5, с. 98-108).
Функциональные преобразователи (1, с. 14,300-303; 8, с. 223-233). Телемеханические устройства: шифраторы и дешифраторы (3,
с. 147-148; 9, с. 494-503).
Аппаратура диспетчерской телефонной связи (10, с. 258-260).
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
Необходимость создания этих средств вызвана в основном централизацией процессов управления, связанной с удлинением коммуникаций. Так, если пункт управления находится от объекта на расстоянии более 300 м, а по условиям взрывоопасности на нем установлена аппаратура пневмоавтоматики, то ее пневматический сигнал с помощью пневмоэлектропреобразователя необходимо преобразовать в эквива-
13
лентный электрический сигнал, который и передается через систему дистанционной передачи на аппаратуру электроавтоматики, расположенной на пульте управления.
Аналоговые средства передачи информации проигрывают в сравнении с передачей кодированных сигналов, поэтому в настоящее время все шире применяются устройства, преобразующие аналоговый сигнал
вдискретный, в т.ч. кодированный. При этом не следует забывать, что
вряде случаев имеют место и обратные преобразования. Последние наиболее характерны для выходных устройств АСУТП.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Объясните назначение и принцип действия преобразователя напряжения в код.
2.Объясните назначение и принцип действия электропневматического преобразователя.
3.Для чего используются шифраторы и дешифраторы ?
4.Изобразите несколько закодированных сигналов.
Тема 7. АГРЕГАТНЫЕ КОМПЛЕКСЫ СРЕДСТВ АВТОМАТИЗАЦИИ
Электронные агрегатные средства регулирования АКЭСР первой и второй очереди (1, с. 276-285; 6, с. 139-143; 7, с. 503-515).
Комплекс регулирующих и функциональных блоков на микро-
электронной базе ″ Каскад-2″ (1, с. 263-274; 7, с. 515-522). |
|
|
Комплекс приборов и устройств ″ Контур-2″ (1, |
с. |
285-287; 6, |
с. 131-139; 7, с. 522-528). |
|
|
Комплекс контроля и регулирования с переменной структурой ти- |
||
па КМ2201 (7, с. 533-545). |
|
|
Пневматическая аппаратура системы ″ Старт″ |
и |
комплексы |
″ Центр″ и″ Центр-логика″ (1, с. 300-310; 6, с. 102-131; 7, с. 546-576; 645650).
Агрегатные системы сигнализации, защиты и блокировки МЗС, УТС-1, УАС-206, МСКС, ПТКАЗ (3, с. 100-133).
Объектно-ориентированный комплекс ″ Режим″ (3, с. 170-175; 5,
с.585-589).
Программно-технический комплекс (3, с. 167-170; 7, с. 603-605).
14
Зарубежные агрегатные средства управления (МОД-300, ТДС3000 (3, с. 176-190).
Аппаратура микропроцессорных средств диспетчеризации, автоматики и телемеханики Микро-ДАТ (7, с. 652-679).
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
Понятие агрегатного комплекса определяет совокупность технических средств, характеризующихся всеми составляющими совместимости и предназначенных для решения определенных задач автоматического контроля и регулирования. На уровне локальных систем автоматизации эти задачи решаются комплексами (системами) Контур-2, Каскад-2, АКЭСР-1 и АКЭСР-2, СУПС, Старт-2. При централизованном управлении, где решаются более сложные задачи с большим объемом измерительной и командной информации, а также связями с вышестоящими структурами, используются АСКР-ЭЦ, Микро-ДАТ и ″ Центр″ .
Изделия из агрегатных комплексов создают на унифицированной конструктивной базе по блочно-модульному принципу построения с использованием базовых модулей. Различное сочетание устройств, входящих в комплекс, позволяет реализовать новые функции.
Значительная часть аппаратных комплексов является основой АСУТП.
КОНТРОЛЬНЫЕ ВОПРОСЫ 1. Какова необходимость создания агрегатных комплексов ?
2.Изобразите конструктивно-структурную схему системы ″ Каскад″ и объясните назначение представленных блоков.
3.С помощью каких устройств осуществляется ручное управление исполнительными механизмами в известных вам агрегатных комплексах ?
4.Какие комплексы содержат в своей структуре ЭВМ (УВМ) ?
5.Какие возможности дает применение микропроцессорных уст-
ройств?
15
Тема 8. ОСНОВЫ ПРОЕКТИРОВАНИЯ СИСТЕМ АВТОМАТИЗАЦИИ
Выбор регулируемых величин и каналов воздействий. Выбор контролируемых, сигнализируемых величин, параметров и способов защи-
ты (3, с. 27-31).
Проектирование систем автоматизации и изображение средств автоматизации на функциональных схемах по ГОСТ 21404-85 (10, с. 209216; 11, с. 223-235).
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
Изучение одиночных аппаратных технических средств и комплексов на их основе должно дать полное представление о возможностях их использования для решения тех или иных задач автоматизации. Кроме того рассматриваемая на более ранней стадии обучения теория автоматического управления предполагает наличие элементарных знаний об основах анализа и синтеза систем автоматизации. Совокупность этих знаний позволяет выбирать вполне осознанно конфигурацию несложных одноконтурных систем автоматического регулирования с обратными связями; комплектовать системы техническими средствами в соответствии с существующими условиями, а также отображать их на структурных и функциональных схемах.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. На основании каких данных судят о правильности выбора канала регулирующего воздействия ?
2.Каковы основные задачи защитной аппаратуры ?
3.Какие обозначения измеряемых (регулируемых) параметров на функциональных схемах автоматизации вам известны ?
4.Какие виды блокировок вам известны и как они работают ?
5.В чем смысл использования мигающей сигнализации ?
6.Как формируется надпись на условном изображении прибора ?
16
КОНТРОЛЬНОЕ ЗАДАНИЕ
Контрольное задание состоит из трех задач, первые две из которых предполагают рассмотрение принципиальных электрических (пневматических), а также конструктивных схем устройств автоматизации. Третья задача требует аналитического определения параметров регулятора по заданной схеме и передаточной функции.
Номер варианта соответствует последней цифре номера зачетной книжки студента. Вариант 10 соответствует цифре 0 в зачетной книжке.
Задача №1
Представить конструкцию и объяснить принцип действия механизма исполнительного:
1) пневматического мембранного обратного действия с верхним ручным дублером и позиционером;
2)электрического однобортного типа МЭО с управлением от бесконтактного пускателя;
3)электрического однобортного типа МЭО-К с управлением от бесконтактного пускателя;
4)электрического многобортного типа МЭМ;
5)электрического прямоходового типа МЭП;
6)пневматического поршневого типа ПСП-Т-1;
7)гидравлического поршневого типа МГП с позиционером;
8)электромагнитного с электромагнитной шариковой защелкой;
9)электромагнитной ферропорошковой муфты;
10) электромагнитной муфты скольжения индукторного типа.
Задача №2
Представить принципиальную схему и описать действие:
1) устройства регулирующего (регулятора) пневматического пропор- ционального-интегрального системы «СТАРТ»;
2)устройства регулирующего (регулятора) пропорциональноинтегрального с местным задатчиком системы «СТАРТ»;
3)устройства регулирующего (регулятора) позиционного с настраиваемой зоной возврата системы «СТАРТ»;
4)блока регулирующего аналогового с импульсным выходным сигналом системы «Каскад-2»;
17
5)блока регулирующего РП4-У комплекса АКЭСР второй очереди;
6)регулятора давления прямого действия для агрессивных жидкостей;
7)регулирующего прибора Р25 системы «Контур»;
8)электронного регулятора температуры типа Ш45;
9)позиционного регулирующего (сигнализирующего) устройства с раздельной задачей на каждый канал шестиканального измеритель-
ного прибора КС2 или РП-160; 10) прибора регулирующего микропроцессорного программируемого
«ПРОТАР».
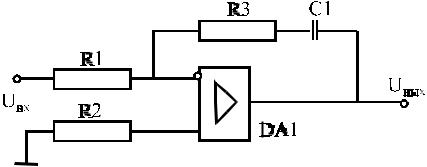
Задача №3
Рассчитать параметры аналогового регулятора (см. рисунок) на основе операционного усилителя (ОУ), реализующего ПИ-закон регулирования. Передаточная функция регулятора и данные об элементах схемы даны в таблице.
Схема ПИ-регулятора
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
18 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
№ |
Передаточная функция |
|
Данные об элементах |
||||||||||||||||
|
регулятора |
|
|
|
|
|
|
|
|
|
схемы |
||||||||
1 |
W(p) = 10+ |
1 |
|
|
|
|
|
|
|
|
|
R1=1K |
|||||||
|
|
|
|
10− 3 p |
|
|
|
|
|
|
|
|
|
||||||
2 |
W(p) = 8+ |
1 |
|
|
|
|
|
|
|
|
|
R1=1,5K |
|||||||
|
|
|
10− 3 p |
|
|
|
|
|
|
|
|
|
|
||||||
3 |
W(p) = 12+ |
1 |
|
|
|
|
|
|
|
|
|
R1=0,8K |
|||||||
|
|
|
|
10− 3 p |
|
|
|
|
|
|
|
|
|
||||||
4 |
W(p) = 10+ |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
R1=2K |
||||
|
|
|
|
1,2 10− 3 p |
|
|
|
|
|
||||||||||
5 |
W(p) = 6+ |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
R1=0,5K |
||||
|
|
|
1,5 10− 3 p |
|
|
|
|
|
|
||||||||||
6 |
W(p) = |
10+ |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
R1=3K |
|||
|
|
|
|
2,2 10− |
3 p |
|
|
|
|||||||||||
7 |
W(p) = |
8+ |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
R1=2,5K |
|||
|
0,8 10− 3 p |
|
|
|
|
||||||||||||||
8 |
W(p) = |
11+ |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
R1=2,2K |
|||
|
|
|
0,9 10− |
3 p |
|
|
|
||||||||||||
9 |
W(p) = 10+ |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
R1=1,2K |
||||
|
|
|
|
|
2 10− 3 p |
|
|
|
|||||||||||
10 |
W(p) = 8+ |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
R1=0,6K |
||||
|
|
1,8 10− 3 p |
|
|
|
||||||||||||||
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
Для решения первых двух задач достаточно просмотреть материал, изложенный в рекомендованной литературе, где имеется все необходимое. Кроме того, возможно и использование технического описания и инструкции по эксплуатации, выпускаемых для каждого конкретного изделия.
Для решения третьей задачи необходимо выполнить раздел «Электротехника», изученный ранее по курсу физики.
19
Работа выполняется в обычной ученической тетради. Большие схемы и конструкции лучше выполнить в виде вкладок на листах формата А4.
Составитель ВЛАДИМИР АЛЕКСЕЕВИЧ
СТАРОВОЙТОВ
ТЕХНИЧЕСКИЕ СРЕДСТВА АВТОМАТИЗАЦИИ
Программа, методические указания, контрольные задания и курсовая работа для студентов заочного обучения специальности 170500 ″ Машины и аппараты химических производств
и предприятий строительных материалов″ (ХМз)
Редактор З.М. Савина
ЛР № 020313 от 23.12.96.
Подписано в печать 11.11.00. Формат 60х84/16. Бумага офсетная. Отпечатано на ризографе. Уч.-изд. л. 1,0. Тираж 40 экз. Заказ
Кузбасский государственный технический университет. 650026, Кемерово, ул. Весенняя, 28.
Типография Кузбасского государственного технического университета. 650099, Кемерово, ул. Д. Бедного, 4А.