

А.Е. Медведев Регулирующий микропроцессорный контролер Р-110
.pdfМинистерство образования Российской Федерации Кузбасский государственный технический университет Кафедра электропривода и автоматизации
РЕГУЛИРУЮЩИЙ МИКРОПРОЦЕССОРНЫЙ КОНТРОЛЛЕР P-110
Методические указания к выполнению лабораторной работы по дисциплине “Системы автоматизации и управления” для студентов направления 550200 “Автоматизация и управление”
Составитель А.Е.Медведев Утверждены на заседании кафедры Протокол № 5 от 31.03.2000 Рекомендованы к печати методической Комиссией по направлению 550200 Протокол № 3 от 31.03.2000 Электронная копия находится в библиотеке главного корпуса КузГТУ
Кемерово 2000
1
1. ЦЕЛЬ РАБОТЫ
Ознакомиться с устройством регулирующего микропроцессорного контроллера (ремиконта) Р-110 и приобрести навыки технологического программирования ремиконтов.
2. ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
2.1.Ознакомиться с устройством и техническими данными Р-110, расположением его элементов на стенде. Изучить физическую структуру ремиконта, органы управления и средства индикации панели оператора ПО-2.
2.2.Осуществить программирование аналогового ПИ – закона регулирования (организовать структуру ПИ–регулятора на ремиконте) и экспериментально снять на стенде его временные характеристики (переходные функции) для заданных преподавателем 2-3 вариантов параметров настройки (К6, Т1) алгоритма регулирования и входного сигнала.
2.3.Определить по полученным временным характеристикам дей-
ствительные значения параметров настройки алгоритма регулирования (К6*, Т1*), сравнить их с заданными значениями и проанализировать влияние этих параметров на вид полученных временных характеристик.
3. СОДЕРЖАНИЕ ОТЧЕТА
3.1. Назначение, основные технические данные, физическая структура ремиконта и панель оператора.
3.2. Алгоритмическая схема аналогового регулятора на ремиконте, таблицы конфигурации и коэффициентов.
3.3. Экспериментальные временные характеристики Uвых (t) ПИ – регулятора и определенные по ним действительные параметры настройки К6*, Т1*алгоритма регулирования.
4. ОПИСАНИЕ РЕМИКОНТА И МЕТОДИКИ ВЫПОЛНЕНИЯ РАБОТЫ
4.1. Общие сведения Ремиконт Р-110 представляет собой микропроцессорное устройст-
во управления для решения задач автоматического регулирования тех-
2
нологических процессов в различных отраслях промышленности. Р-110 используется в системах с большим числом каналов ввода-вывода при умеренных требованиях к надежности и живучести.
Технические данные
Число входов: |
|
ванически отделены от общей шины |
||||
аналоговых до 64 (8 групп по 8 входов) |
Ремиконта. |
|
|
|
||
дискретных до 63 (8 групп по 8 входов, |
Входные и выходные |
аналоговые |
||||
каждый вход |
|
|
сигналы постоянного тока 0-10 В галь- |
|||
имеет три шины – |
ванического разделения не имеют. |
|
||||
общую, «цепь1» и |
Входные дискретные сигналы постоян- |
|||||
«цепь2», всего – |
|
ного напряжения, В: |
|
|
||
до 126 входов) |
|
|
|
0 ± 2,4 |
||
Число выходов: |
|
логический «0» |
|
|||
аналоговых |
до 64 (8 групп по 8 выхо- |
логическая «1» |
± |
(19,2…28,8) |
||
|
дов) |
Выходные импульсные и дискретные |
||||
импульсных |
до 64 (8 групп по 8 выхо- |
сигналы в виде состояния выходного |
||||
|
дов, каждый выход имеет |
транзистора: |
|
|
|
|
|
три шины – общую, ши- |
логический «0» |
|
разомкнутое |
||
|
ну «меньше» и шину |
логическая «1» |
|
замкнутое |
||
|
«больше») |
Входные дискретные, выходные дис- |
||||
дискретных |
до 63 (8 групп по 8 выхо- |
кретные и импульсные сигналы также |
||||
|
дов, каждый выход имеет |
гальванически отделены друг от друга |
||||
|
три шины - общую, шины |
и от общей шины Ремиконта; шины |
||||
|
«цепь1» и «цепь2», |
«цепь1» и «цепь2» дискретных вход- |
||||
|
всего – до 126 выходов) |
ных сигналов между собой гальваниче- |
||||
Максимальное суммарное число вхо- |
ски связаны; аналогично гальванически |
|||||
дов-выходов зависит от конкретного |
связаны между |
собой |
«цепь1» |
и |
||
сочетания входных и выходных сигна- |
«цепь2» дискретных выходных сигна- |
|||||
лов и лимитируется числом модулей |
лов, а также шины «меньше» и «боль- |
|||||
ввода-вывода, которые можно устано- |
ше» импульсных выходных сигналов. |
|||||
вить в один каркас. |
Коммутирующая способность: |
|
||||
Входные |
и |
выходные аналоговые |
по напряжению постоянного |
|
||
сигналы постоянного тока 0-5, 0-20, |
тока, В |
|
до 48 |
|||
4-20 мА; 0-10 В. |
|
по току, А |
|
до 0,2 |
||
Входные и выходные сигналы посто- |
Число алгоблоков |
до 64 (8 зон по |
||||
янного тока 0–5, 0-20, 4-20 мА имеют |
|
8 алгоблоков) |
||||
гальваническое |
разделение: каждый |
Число алгоритмов управления |
45 |
|||
вход гальванически отделен от другого; |
Время цикла, с |
|
0,27; 0,51 |
|||
каждый выход гальванически отделен |
|
|
1,02; 2,04 |
|||
от другого; входы гальванически отде- |
|
|
|
|
||
лены от выходов; входы-выходы галь- |
Дискретность установки сигнала |
|
||||
|
|
3 |
|
Статическая точность стабилизации |
задания, % |
0,1 |
|
параметра (без учета погрешности |
Длина линии связи, км |
до 1 |
|
датчика), % |
≤ 0,15 |
Питание – от сети переменного тока: |
|
Разрядность АЦП |
11 плюс знак |
напряжение, В |
220 или 240 |
Разрядность ЦАП |
10 плюс знак |
частота, Гц |
50 или 60 |
Время, в течение которого при |
Условия эксплуатации: |
|
|
отключении питания сохраняется |
температура окружающего |
|
|
запрограммированная информация, |
воздуха, о С |
0…40 |
|
ч, не менее |
360 |
относительная влажность |
|
Вид интерфейса |
ИРПС |
воздуха, % |
не более 80 |
|
|
Тип помещения |
закрытое, |
|
|
взрывобезопасное |
|
4.2. Состав Ремиконта Ремиконт Р-110 состоит из набора модулей, основных блоков,
дополнительных блоков и конструктивных элементов.
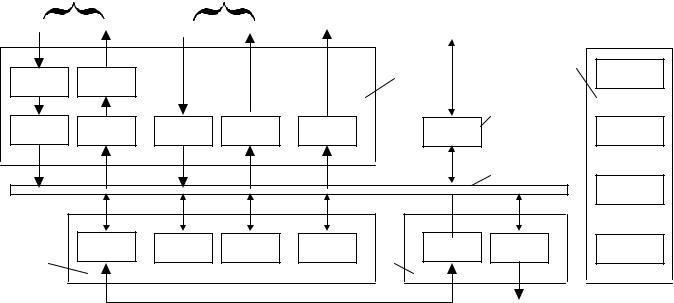
Физическая структура Ремиконта (рис. 1) характеризует электрические связи его отдельных элементов.
Входы – выходы
Аналоговые |
Дискретные Импульсные Интерфейс |
|
ИРПС |
РГ12 |
РГ22 |
|
|
|
1 |
|
3 |
БПС-5 |
|
|
|
|
|
||||
АЦП2 |
ЦАП2 |
ДЦП2 |
ЦДП2 |
ЦИП2 |
МИС2 |
2 |
|
БПН-24 |
|
|
|
|
|
|
4 |
|
БПР-5 |
|
|
|
|
|
|
|
|
|
6 |
ПРЦ5 |
ПЗУ2 |
ОЗУ4 |
ОЗУ4 |
ПО2 |
МУС2 |
|
БСЭЛ |
|
|
|
|
5 |
|
|
|
Отказ, ошибка
Рис. 1. Физическая структура Ремиконта: 1 - устройство связи с объектом (УСО); 2 - модуль интерфейсной связи; 3 - устройства питания и переключения; 4 – внутриблочная цифровая шина; 5 - устройства связи с оператором; 6 – микропроцессорный вычислитель
4
На модулях смонтированы электронные компоненты, обеспечивающие преобразование и обработку сигналов управления и команд оператора.
Основные блоки входят в состав каждого Ремиконта. Дополнительные блоки – это конструктивно и функционально законченные изделия, которыми при необходимости может укомплектоваться Ремиконт. Конструктивные элементы объединяют модули, блоки и дополнительные устройства в единую конструкцию.
Модули делятся на следующие группы: модули микропроцессорного вычислителя, модули связи с оператором, модуль интерфейсной связи.
Всостав микропроцессорного вычислителя входят три модуля: процессор ПРЦ5, постоянное запоминающее устройство ПЗУ2, оперативное запоминающее устройство ОЗУ4.
Модуль ПРЦ5 обрабатывает информацию в соответствии с заданной программой. Процессор построен на базе микропроцессора серии К580.
Вмодуле ПЗУ2 «зашито» программное обеспечение контроллера, включающее в программу, организующую процесс вычислений, программу всех алгоритмов управления, программу обслуживания панели оператора и интерфейсных каналов, программу тестирования и самодиагностики.
Вмодуле ОЗУ4 хранятся параметры, которые может изменять оператор: информация о выбранных алгоритмах управления, об установленной конфигурации, коэффициентах, режимах, задании, времени цикла. В ОЗУ4 хранится также накапливающаяся информация, формирующаяся в процессе выполнения динамических алгоритмов. Для сохранения запрограммированной и накапливающейся информации при отключении питания используется батарея сухих элементов.
Устройства связи с объектом состоят из семи модулей: аналогоцифрового преобразователя АЦП2, цифроаналогового преобразователя ЦАП2, дискретно-цифрового преобразователя ДЦП2, цифродискретного преобразователя ЦДП2, цифроимпульсного преобразователя ЦИП2, разделителя гальванического РГ12, разделителя гальванического РГ22.
Модуль АЦП2 осуществляет преобразование входных аналоговых сигналов в цифровую форму модуль ЦАП2 – преобразование цифровых сигналов в аналоговые выходные сигналы, модули ДЦП2 и ЦДП2 – со-
5
ответственно дискретно – цифровое и цифродискретное преобразование сигналов.
Модуль ЦИП2 применяется в комплекте с исполнительным механизмом постоянной скорости. Он лишь усиливает сигналы по мощности широтно-импульсная модуляция выходного сигнала выполняется программно.
Модули ДЦП2, ЦДП2 и ЦИП2 содержат узлы гальванической развязки; модули АЦП2 и ЦАП2 такой развязки не содержат. Для гальванического разделения аналоговых входных и выходных цепей используются соответственно модули РГ12 и РГ22.
Функции связи с оператором выполняет модуль управления и сигнализации МУС2, который содержит светодиоды, сигнализирующие о неисправности блока стабилизированного питания, об ошибках, связанных с выполнением программы, о неисправности резервной батареи. Модуль имеет также два дискретных выхода «отказ» и «ошибка», на которых формируется обобщенная информация о неисправностях как аппаратуры, так и программного обеспечения контроллера. Кроме того, модуль содержит один канал интерфейсной связи ИРПС.
Модуль интерфейсной связи МИС2 содержит четыре интерфейсных канала радиальной последовательной связи ИРПС.
Все модули, между которыми производится обмен цифровой информацией, объединены системой параллельных шин (внутренним интерфейсом). К этим модулям относятся ПРЦ5, ПЗУ2, ОЗУ4, АЦП2, ЦАП2, ДЦП2, ЦДП2, ЦИП2, МУС2 и МИС2.
Модули гальванической развязки – входной РГ12 и выходной РГ22 - не связаны с внутренним интерфейсом и сопрягаются с соответствующими преобразователями АЦП2 и ЦАП2 с помощью обычного кабельного соединителя, по которому передается аналоговая информация.
Блок питания БПС-5 и батарея сухих элементов БСЭл подключены к входящим в интерфейс специальным шинам, к которым подключаются соответствующие модули Ремиконта.
Основные блоки включают в себя панель оператора ПО-2, блок питания стабилизированный БПС-5, батарею сухих элементов, блок вентиляторов.
Панель оператора ПО-2 содержит набор функциональных клавиш, цифровых и светодиодных индикаторов, с помощью которых ведется программирование Ремиконта и контролируется его работа.
6
Панель оператора ПО-2, хотя и использует цифровую информацию, непосредственно к интерфейсу не подключается: между ПО-2 и интерфейсом включены буферные элементы, расположенные в модуле ПРЦ5. В связи с этим панель оператора ПО-2 подключается через разъем, установленный на лицевой панели модуля ПРЦ5.
Блок питания БПС-5 вырабатывает стабилизированные напряжения, необходимые для питания модулей.
Батарея сухих элементов БСЭл на напряжение 4 В автоматически подключается к ОЗУ4 при отключении сетевого питания и используется для сохранения запрограммированной информации при перерывах питания.
Логика работы внутреннего интерфейса Ремиконта соответствует интерфейсу И-41 (использующемуся, например, в микроЭВМ СМ 1800).
Блок вентиляторов используется для охлаждения модулей и блока питания.
Дополнительные блоки состоят из блока преобразования напряжения БПН-24 и блока переключения БПР-5.
Блок преобразования напряжения БПН-24 вырабатывает нестабилизированное напряжение постоянного тока 24 В, используемое для питания дискретных входных и дискретных и импульсных выходных цепей.
Блок БПР-5 по дискретной команде (обычно поступающей с выхода «отказ» Ремиконта) переключает выходные цепи контроллера.
Ремиконт Р-110 размещается в одном каркасе. Он комплектуется одной панелью оператора.
4.3.Панель оператора ПО – 2
Внешний вид лицевой панели ПО-2 приведен на рис. 2. Органы управления и средства индикации сгруппированы в двух областях: области настройки (программирования общих параметров - I и программирования алгоблоков – II) и области оперативного управления – III.
Органы управления и индикации, размещенные в области настройки, позволяют оператору изменить структуру контроллера и параметры алгоритмов регулирования. Средства оперативного управления позволяют оператору взаимодействовать с процессом регулирования, а
7
также контролировать значения сигналов на входе контроллера и алгоблоков.
К клавиатуре настройки относятся клавиши: ПУСК / СТОП – пуска и останова контроллера;
ОБНУЛ. ОБЩЕЕ |
– общего обнуления контроллера (его под- |
|
|
|
готовки для программирования ); |
ОБНУЛ. АЛГОБЛ – обнуления алгоблока; |
||
АЛГОРИТМ |
– перехода в режим установки алгоритма; |
|
КОНФ |
– перехода в режим конфигурирования (органи- |
|
|
|
зации заданной структуры контроллера); |
КОМПЛ |
|
- перехода в режим установки комплектности |
|
|
(задания числа зон управления и модулей |
|
|
АЦП, используемых для реализации системы |
|
|
управления); |
То |
- контроля времени цикла работы контроллера; |
|
ИНВ |
- перехода в режим инвертирования (изменения |
|
|
|
знака) сигнала, поступающего на вход алгоб- |
|
|
лока; |
БЕЗ ИНВ |
|
- без инвертирования входного сигнала; |
ЦЕПЬ1, ЦЕПЬ2 |
|
- задания цепей 1,2 дискретного выхода алгоб- |
|
|
лока (контроллера); |
КОЭФ |
|
- перехода в режим установки коэффициентов |
|
|
алгоритма; |
КОНТР ВХ, |
- перехода в режим контроля входных сигналов |
|
КОНТР АЛГОР |
|
контроллера, алгоритма; |
ИЗМ |
- |
разрешения изменения параметров настройки; |
ТЕСТ |
- перехода в режим тестирования; |
|
ПрПЗУ |
- перехода в режим программирования |
|
|
|
(репрограммирования); |
КВИТ ОШ |
- квитирования ошибки. |
|
Ксредствам индикации настройки относятся:
-индикаторы состояния контроллера (ПУСК, СТОП, ТЕСТ, ПрПЗУ)
-индикаторы квитирующих (подтверждающих выполнение команд оператора ) сигналов ( АЛГОРИТМ, КОНФ, КОНТР, КОМПЛ, То, ИНВ, БЕЗ ИНВ, ЦЕПЬ1, ЦЕПЬ2, КОЭФ, КОНТР, ВХ, КОНТР АЛГОЛ, КВИТ, ОШ)
-индикаторы параметров настройки (К2 – К5, Н1 – Н6, Т1 – Т5)

|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
контр |
квит |
|
Без |
|
|
|
Обнул |
Контр |
|
||
I |
вх |
ош |
Алгоритм Конф инв |
Инв 2 |
цепь1 |
|
алгобл |
алгобл |
II |
|||
Пуск |
|
|
|
|
|
|
|
|
|
|
|
|
Стоп |
Компл То |
К2 К3 К4 К5 Н1 Н2 Н3 Н4 Н5 К6 Т1 Т2 Т3 Т4 Т5 |
|
|||||||||
|
|
|||||||||||
Изм |
|
|
Коэф |
|
|
|
|
|
|
|
|
|
|
|
|
Масштаб |
|
Кn |
Ти Тд ТФ Тк Тм |
|
|||||
Обнул |
Тест Пр ПЗУ |
|
|
|
|
|||||||
|
|
|
|
|
2 |
|
|
1 |
|
|||
общее |
|
|
Ошибка |
|
|
|
|
вых |
III |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
Отключить перезапуск! |
ЦИ |
1 |
2 |
0 |
3 |
|
1 |
2 |
4 |
|
||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
Алгобл |
Вх |
Здн |
ε |
Вых |
|
|||
|
|
|
|
|
|
|
|
|
|
|
||
УВМ Каск Авт Ручн Запр Дст Слеж |
Здн |
|
|
|
Вых |
|
||||||
|
|
|
|
|
|
|
|
|
||||
Рис. 2. Панель оператора ПО-2: I – область программирования общих параметров; II – область программирования алгоблоков; III – область оперативного управления.
Клавиши оперативного управления: АЛГОБЛ - выбора алгоблока;
УВМ, КАСК, АВТ, РУЧН - выбора режима управления с формированием задания, алгоблоку, соответственно, от УВМ (супервизорный режим), каскадный (от ведущего алгоблока ), автоматический (от панели оператора ), ручной (алгоблок отключен, а его выход подключается к узлу ручного управления с панели оператора);
9
ЗДН ↓ , ЗДН ↑ , ВЫХ↓ , ВЫХ ↑ - изменения величины задания
|
и выходного сигнала; |
↑ ↓ |
- скорости изменения задания и вы- |
ВХ, ЗДН, ε, ВЫХ |
ходного сигнала; |
- клавиши выбора вида цифровой ин- |
|
|
дикации сигналов. |
Ксредствам индикации оперативного управления относятся:
-индикаторы режима управления (УВМ, КАСК, АВТ, РУЧН, ЗАПР, ДИСТ, СЛЕЖ);
-индикаторы вида цифровой индикации (ВХ, ЗДН, ε, ВЫХ);
-цифровой индикатор кода алгоблока (номеров зоны и алгоблока в зоне). Расположен в левой части цифрового индикатора ЦИ;
-левый и правый цифровые индикаторы (средняя и правая части ЦИ), представляющие оператору информацию в цифровой форме о параметрах настройки, конфигурации, значении сигналов;
-индикаторы дискретных сигналов (ВЫХ 1, ВЫХ 2);
-индикатор ошибки (ОШИБКА).
4.4. Методика выполнения работы
Задание на программирование оформляется в виде таблиц конфигурации (табл. 1) и параметров (табл. 2) и алгоритмической схемы аналогового регулятора на Ремиконте, пример которой представлен на рис. 3. На схеме записывают коды алгоблока, алгоритма, программируемых связей (источника и приемника сигналов), входа и выхода алгоблока. Также должна быть задана величина скачкообразного изменения входного сигнала ∆ Uвх.
В работе программируют один ПИ – регулятор, используя стандартный аналоговый алгоритм регулирования 01.РАС, позволяющий реализовать несколько типовых законов регулирования.
Последовательность выполнения операций программирования Ремиконта Р-110 в соответствии с заданием (см. табл. 1, 2 и рис. 3) для ∆ Uвх = 2В представлены в табл. 3. Поясним особенности программирования ПИ – регулятора.
Процесс программирования состоит из нескольких операций, которые проводят последовательно. Готовность Ремиконта к выполнению очередной операции подтверждается загоранием ламповых индикато-