

6. Получить систему линеаризованных уравнений состояния обьекта в пространстве состояний при малых отклонениях
Все процессы (ОУ) в природе нелинейные. Решать задачи анализа и синтеза САУ для нелинейных ОУ достаточно сложно. Поэтому, если это возможно, нелинейные процессы линеаризуют, а затем для решения различных задач используют классический математический аппарат линейных САУ.
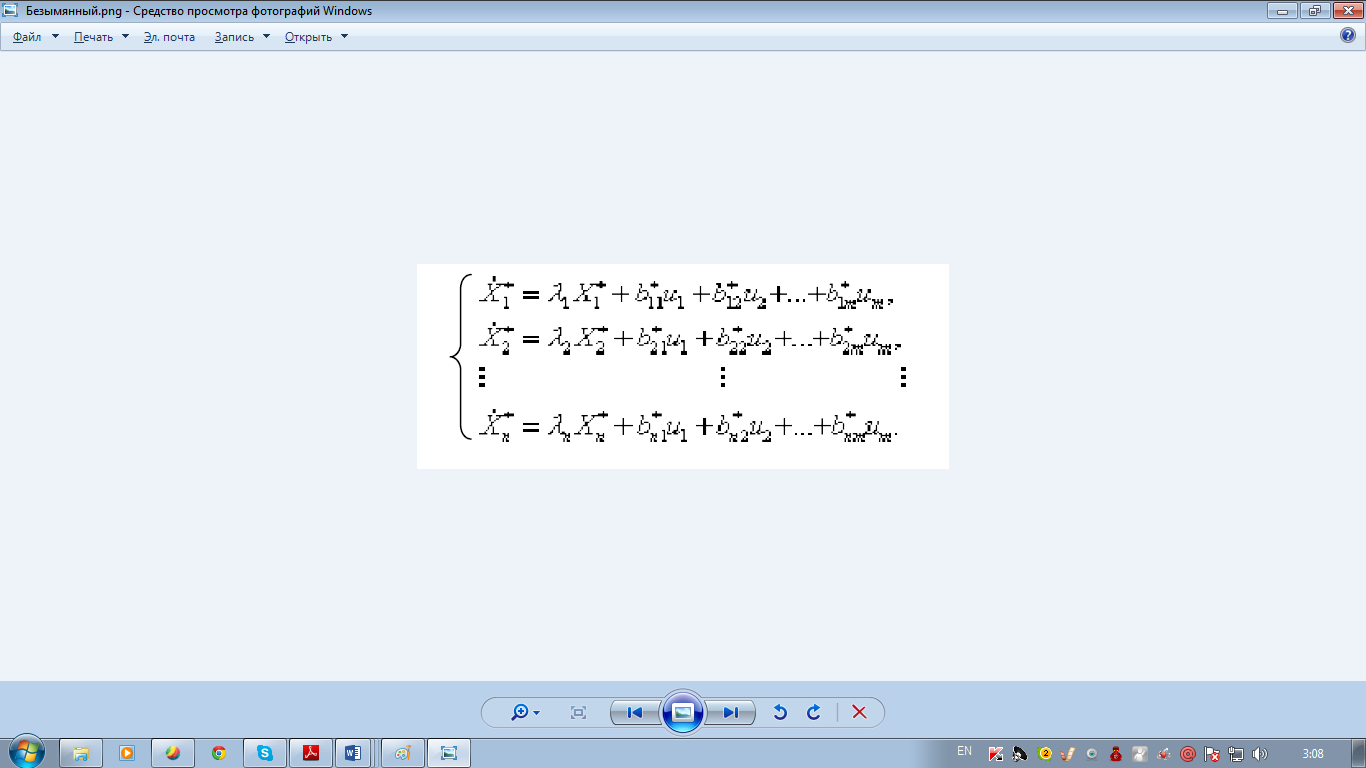
Итак пусть нелинейный процесс описывается следующим уравнением
 (1)
(1)
Где x(n*1)- мерный вектор состояния;
u(n*1) -мерный вектор управления;
f(n*1)-мерная вектор-функция.
Нелинейный
процесс можно линеаризовать относительно
некоторого рабочего состояния, если на
вход подать небольшое возмущение

Если
на входе процесса ,
то приращение получат и векторx.f.
т. е.
,
то приращение получат и векторx.f.
т. е.
 δ
δ
 (2)
(2)
Вычитая уравнения (2) уравнения(1), получим

Где
 означает частная производная в окрестности
рабочей точки
означает частная производная в окрестности
рабочей точки
Обозначим
A=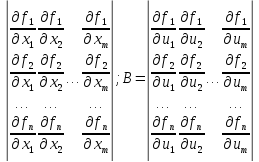
Тогда уравнения(3) перепишется в следующем виде
Которое называется линеаризованным при малых возмущениях.
7.Получить линеаризованные математическое описание динамической системы первого приближения, если нелинейные функции допускают разложение их в степенные сходящиеся ряды.
8. Как определяются собственные числа матрицы? Показать прямой метод определения собственных векторов матрицы.
Если
для матрицы А
некоторый вектор удовлетворяет следующему уровнению:
удовлетворяет следующему уровнению:
 ,
то 𝜆
называется собственным числом матрицы
А,(𝜆-скаляр);
,
то 𝜆
называется собственным числом матрицы
А,(𝜆-скаляр);
 .
.
Решим
задачу нахождения собственного числа
и обственного вектора. Если перенесем
переменные в левую часть последего
уровнения и вынесем вектор
 вправо,
то получим следующее уровнение:
вправо,
то получим следующее уровнение:
 ,
,
где
0-нулевой вектор, т.е. 0= .
.
Для
того уравнение имело решение, необходимо,
чтобы определить матрицы
 был равен нулю,т.е.
был равен нулю,т.е.
Раскрыть определить, получаем полиномиальное уравнения следующим вида:
 (1)
(1)
Где
 –коэффициенты
характеристического полинома.
–коэффициенты
характеристического полинома.
Полученное
уравнение
 и называется характеристическим
уравнением матрицыА.
Корни характеристического полинома
(1)
и называется характеристическим
уравнением матрицыА.
Корни характеристического полинома
(1) называется
собственными
значениями (собственными числами)матрицы
А.
называется
собственными
значениями (собственными числами)матрицы
А.
Прямой определение собственных векторов
Пусть
имеем линейное однородное уравнение

Заданы начальные условия Х(0) =Х0 ≠ 0.
Решение имеет
вид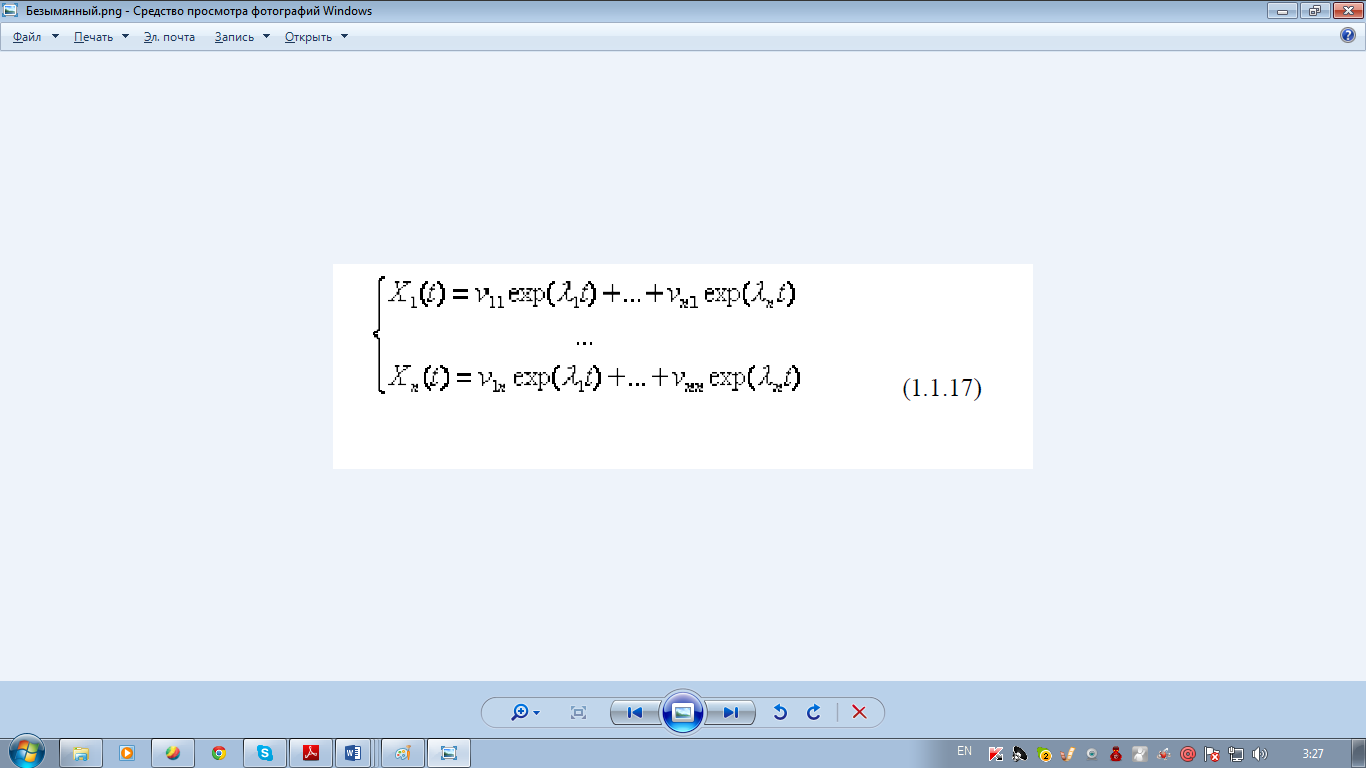
(1.1.17 или в векторной форме
Х
(t) = V exp(𝜆t)
=
 exp(
exp( t)
+ ... +Vn
exp(
t)
+ ... +Vn
exp( t),
t),
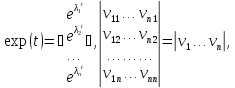
где
vij
– собственные
векторы (i,
j = ),
Vi
–
вектор
столбец
),
Vi
–
вектор
столбец
 .
.
Это так называемое
каноническое преобразование, в
кото- ром
матрицей линейного преобразования
является матрица
собственных
векторов V.
Возвращаясь
к дифференциальному
уравнению
( ),можем
записать
),можем
записать
 =АV
exp(t)=А[V1
exp(1t)
+ ... + Vn
exp(nt)]
..
(1.1.18) Дифференцирование
уравнения (1.1.17) по t
дает
=АV
exp(t)=А[V1
exp(1t)
+ ... + Vn
exp(nt)]
..
(1.1.18) Дифференцирование
уравнения (1.1.17) по t
дает
 =
1
V1
exp(1t)
+ … +
n
Vn
exp(nt)
=
1
V1
exp(1t)
+ … +
n
Vn
exp(nt)
Так как левые части уравнений (1.1.16) и (1.1.18) равны, то и правые должны быть равны. Отсюда находим, что собственные векторы Vi удовлетворяют (для случая, когда все i различны) следующему соотношению: iVi exp(it) = АVi exp(it).
Поделив обе части
уравнения на exp(it)
≠ 0,получим
iVi
= АVi
или
(A
-
iI)Vi=0
( .)
(1.1.19)
.)
(1.1.19)
Следовательно,
собственные векторы Vi
(соответствующие
собственным значениям 𝜆i)
можно определить из
уравнения
(1.1.19). Если
матрица А
имеет "n"
различных собственных
значений,
то собственные векторы Vi
являются
линейно
независимыми.
Так как
матрица А
 I)
системы (1.1.13) имеет
ранг,
который не превосходит величины (n-1),
то каждый из
собственных
векторов Vi
определяется
с точностью до
произвольного
множителя
I)
системы (1.1.13) имеет
ранг,
который не превосходит величины (n-1),
то каждый из
собственных
векторов Vi
определяется
с точностью до
произвольного
множителя
