

Advanced Wireless Networks - 4G Technologies
.pdf108 ADAPTIVE AND RECONFIGURABLE LINK LAYER
4.1.4.1 Net bit rate
The error rate used for expressing QoS requirements is usually the packet error rate (PER) since it is closer to the user’s perception of quality. At the link layer, a packet is considered valid if no error is present or all errors have been corrected. In our model, the correction capability of the code is included in its coding gain, therefore, for the packet to be valid, no residual error is allowed. The packet error rate pE is therefore given by:
pE = 1 − {1 − pe [γ Gc(γ )]}Lp |
(4.7) |
where pe(γ ) is the bit error rate of the uncoded system, Gc(γ ) is the coding gain, γ is the SINR per bit, and Lp is the packet length in bits. Any channel coding scheme can be included in this model provided that its performance is summarized in the coding gain curve, Gc(γ ). In Equation (4.7), errors in the header and in the payload are assumed equiprobable. In reality, errors in the header are more critical because they may cause erroneous addressing and insertion errors. If distinct channel coding schemes are adopted for the two parts, with a stronger code for the header, the probability of a novalid packet is pE = 1 − (1 − pE,h)
(1 − pE,i ) where the probabilities of erroneous header and payload are computed separately as pE,h = 1 − {1 − pe [γ Gc(γ )]}Lh and pE,i = 1 − {1 − pe [γ Gc(γ )]}Li , respectively.
Besides of its advantages in achieving reliable transfer of information, channel coding protection implies a loss in capacity due to the introduced redundancy. Moreover, each protocol layer adds its own header to the packet as it is proceeding downwards through the protocol stack. We assume in the following that the same channel coding scheme is applied to both header and payload. The generalization when distinct schemes are adopted is straightforward. The header efficiency is defined as the ratio between the payload size and the total packet size without redundancy (i.e. header and payload together, Ld = Li + Lh): ηh = Li /Ld. The channel coding efficiency depends on the added redundancy and is represented by its code rate ηc = Ld/(Ld + Lo). Since the packet size after channel coding and packetization can be written as Lp = Li + Lh + Lo = Li /(ηhηc), the bit rate for a given PHY mode (still including residual errors) can be written as
ri = ηhηc,i ki / Ts |
(4.8) |
where ki is the number of bits per symbol of the ith mode modulation scheme, and Ts is the symbol duration.
4.1.5 Link service rate with exact mode selection
The link service capacity is the rate at which error-free information units are transmitted through the channel and is referred to as ‘goodput’. It is a function of the gross bit rate or throughput, which includes the corrupted information units, r, and the residual error rate after correction, e. By using a similar expression for the link service rate as given in Kim and Li [27] for ideal systems with fixed PHY, and extending it to time-varying systems, the goodput at a given instant t can be expressed as
R |
(t) |
= |
[1 |
− |
e(t)]r(t) |
(4.9) |
c |
|
|
|
|
In Equation (4.9), r(t) is the gross channel transmission rate, or throughput, which depends on modulation constellation size, code rate, overheads, etc., and e(t) is the residual
LINK LAYER CAPACITY OF ADAPTIVE AIR INTERFACES |
109 |
error rate, which depends essentially on modulation scheme, channel coding gain, diversity combining methods, and physical channel conditions. The residual error rate after reassembling e has the same value of the packet error rate defined in Equation (4.7) i.e. e = pE.
We extend further Equation (4.9) to adaptive systems. In adaptive systems the transceiver configuration settings change in time depending on the channel state at time t, denoted by S(t) = i or Si . The PHY mode ideally associated with each region and used at time t is denoted with M(t) = i or Mi . To simplify notation, whenever possible we drop the dependence on time t. In presence of ideal link adaptation, the service capacity is obtained averaging across all the modes, resulting in
R¯ c = |
M−1 |
|
[1 − ei ]ri πi |
(4.10) |
|
|
i=0 |
|
where the subscript i denotes the mode, M is the number of implemented modes, and πi is the probability of the channel being in state i and using the ith mode.
4.1.5.1 Model of impairments
In Equation (4.10), the service capacities for all modes can be represented by a vector because the effective and chosen states are assumed to coincide. In case of erroneous mode selection, the gross bit rate depends on the used mode whereas the error rate depends on both the used mode and the effective state. Hence, in the presence of imperfections the two contributions must be separated. In the sequel, we will use the following notation.
vector |
r |
|
RM |
includes the transmit rates for each PHY mode |
The throughputT . |
r = { i } |
|
||
and is defined as r = [ r0 |
· · · |
rM−1 ] with ri given by Equation (4.8). The normalized |
||
goodput matrix Y = {yi j } RM×M includes the effects of errors due to corruption in the
channel for each PHY mode and each state, and expresses the useful bit rate normalized to
.
the transmit rate in each mode. The generic element of matrix Y is defined as yi j = 1 − ei j ,
where ei j denotes the error rate when the mode Mi is used and the channel is in effective |
|
. |
· · · πM−1 ], are the state probabilities of the |
state Sj . The elements of π , π T = [ π0 |
|
CTMC. The mode selection is made by the adaptation algorithm based on an estimated channel conditions. If the adaptive system rapidly follows without errors the channel state, the average goodput, Equation (4.10), is expressed with the new notation by:
¯ |
= |
M−1 |
|
|
|
Rc ideal |
i=0 |
ri (1 − eii ) πi |
(4.11) |
||
|
|
|
|
|
|
or, in compact form: |
|
|
|
|
|
¯ |
|
= r |
T |
diag(Y ) |
(4.12) |
Rc ideal |
|
||||
where = diag(π ) is.the diagonal matrix having as diagonal elements the elements of
vector π , and diag(A) = [aii ] is the operator that extracts the vector of diagonal elements of
.
matrix A: diag(A) = (A I)u, where I is the identity matrix, u is the unity vector having all elements 1, and is the Hadamard–Schur product.
110 ADAPTIVE AND RECONFIGURABLE LINK LAYER
4.1.6 Imperfections in the adaptation chain
A real adaptive communication system is prone to erroneous setup of the transceiver configuration. Estimate errors, estimation delay and feedback errors have so far been neglected. The actual properties of the related errors depend on the particular system configuration. In this chapter, we are not interested in studying a specific system, but rather we want to model common sources of errors in a flexible way open to generalizations.
In reality, the true channel condition is hidden. A delayed or erroneous version of it is visible instead and, based on that, the PHY mode is chosen. The parameter used for the mode switching can be expressed as γˆ (t) = γ (t − τe) + εe + εf, where γ and γˆ are the true and the estimated value, respectively, εe is the estimate error, εf is the feedback error, and τe is the estimation delay or estimation lag. Among these three terms, the first one has more important effect in the open loop case, whereas, in the closed loop case, the other two terms are dominant.
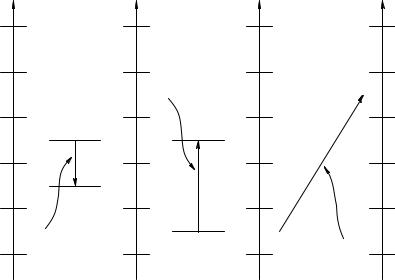
The model of imperfections is depicted in Figure 4.4. At estimation time t the true channel quality metric falls in the kth region, say S(t) = k, and the metric is estimated. Based
ˆ =
on this estimate S(t) h, the mode is selected, where indices k and h may differ because of errors in the estimation process. Since there is equivalence between the cardinality of the PHY modes set M and the signal quality metric regions set S, the code can unambiguously
Acquired channel state |
True channel state |
Effective channel state |
Estimated channel state |
at transmission time |
|
|
at estimation time |
Mi
Feedback error
Feedback process
Estimate error
Mh
S k
Estimation process
Sj
Channel state transition |
after estimation delay |
Channel process
Figure 4.4 The model of imperfections of the channel estimation process. Based on the true channel state at estimation time, an estimate subject to errors is obtained. Its identification code is sent as a message through the error-prone feedback channel and is acquired as the selected state. During the estimation delay, the channel state may change due to its dynamics.
LINK LAYER CAPACITY OF ADAPTIVE AIR INTERFACES |
111 |
represent either the quality metric region or the mode itself. After the estimation delay, the mode, subject to errors in the feedback channel, is transmitted and M(t + τe) = i is acquired at the transmitter (or at the receiver, in the open loop case). This mode is used for transmission (Figure 4.2; or reception, Figure 4.3). In the mean time, the effective channel quality metric falls in general in a new region, S(t + τe) = j, due to possible channel state transitions during the estimation delay τe. The model described here is unaffected whether estimator and mode selector are implemented at transmitter or receiver side, provided that proper values are given to related quantities. For example, in the open loop case, errors on the control message sent to the receiver through a separate channel are modeled with the feedback error. The final effect of the entire process is that in general mode Mi is used at transmission time, when the channel is in effective state Sj . According to the notation above, the probability of this event can be written as P(Mi , Mh , Sk , Sj ). Because the estimation process and the channel process are clearly independent, and assuming that the feedback channel is independent of the direct channel, we can write
P(Mh , Sk , Mi , Sj ) = P(Mh , Sk )P(Mi , Sj |Mh , Sk )
= P(Mh , Sk )P(Mi |Mh , Sk )P(Sj |Mi , Mh , Sk )
(4.13)
= P(Mh , Sk )P(Mi |Mh )P(Sj |Sk )
= P(Sk )P(Mh |Sk )P(Mi |Mh )P(Sj |Sk ).
The three last terms in Equation (4.13) are treated separately in the sequel and their effect on the goodput is then combined by averaging independently the appropriate expressions.
4.1.7 Estimation process and estimate error
In the absence of estimation delay and feedback errors, a possibly erroneous estimate of the metric at time t is used to choose the mode at time t, i.e. γˆ (t) → M(t). The mode estimation probability matrix H(e) = {h(e)hk } RM×M models the effects of the imperfections in the estimation process due to noise. Its generic element h(e)hk represents the probability of selecting mode Mh when the true channel is in state Sk at estimation time:
H(e) = {h(e)hk B Pr{Mh | Sk }} |
(4.14) |
Equation (4.14) represents the second term in Equation (4.13).
4.1.8 Channel process and estimation delay
Now we study the probability that the true state has changed during the delay τe. Consider the presence of estimation delay and absence of estimate error and feedback errors. In other
words, the mode at time t + τe is chosen depending on the exact estimate of the metric at time t, i.e. γ (t) → M(t + τe). The delayed channel transition matrix H(d) = {h(d)k j } RM×M
models the effects of estimation delay. Its generic element h(d)k j represents the probability that given the true channel was in state k at estimation time, at transmission time the channel is in state j:
H |
(d) |
(d) . |
(4.15) |
|
= {hk j = Pr{S(t + τe) = j|S(t) = k}} |
Equation (4.15) represents the last term in Equation (4.13).
112 ADAPTIVE AND RECONFIGURABLE LINK LAYER
4.1.9 Feedback process and mode command reception
The code representing the PHY mode or, equivalently, the related signal quality region, may be corrupted during its transmission through the feedback channel. The mode acquisition probability matrix H(f) = {hi(f)h } RM×M models the probability of mode error due to errors in the feedback channel and has a generic element given by:
H |
(f) |
(f) . |
(4.16) |
|
= {hih = Pr{Mi |Mh }} |
Equation (4.16) represents the third term in Equation (4.13).
4.1.10 Link service rate with imperfections
Combining Equations (4.11), (4.12) and (4.13), and remembering the model in Figure 4.4, we get the expression of the average goodput, i.e. the link service rate in presence of imperfections:
¯ |
M−1 |
M−1 |
M−1 |
(f) M−1 |
(e) |
(d) |
(4.17) |
Rc = |
i=0 |
ri |
(1 − ei j ) |
hih |
hhk |
πk hk j |
|
|
j=0 |
h=0 |
k=0 |
|
|
|
It is easy to see that the average goodput in Equation (4.17) can be written in compact form as:
¯ |
T |
T |
) |
Rc = r |
diag(YΘ |
||
where Θ = {ϑn j } RM×M is the mode-channel probability matrix:
= H(f)H(e) H(d) = H(d)H(f)H(e) = Π
having generic element
M−1 |
M−1 |
M−1 |
πkm hm(d)j = |
M−1 |
M−1 |
ϑn j = |
hnh( f ) |
h(e)hk |
hnh(f) |
h(e)hk πkk hk(d)j |
|
h=0 |
k=0 |
m=0 |
|
h=0 |
k=0 |
(4.18)
(4.19)
(4.20)
Equation (4.20) models the probability of using mode Mn with the channel in the effective state Sj . is the equivocation matrix, which includes the effects of link layer adaptation
process. The innermost summation in Equation (4.17), H |
(e) |
ΠH |
(d) |
= |
M−1 |
(e) |
(d) |
, is |
|
|
k=0 |
hhk |
πk hk j |
the probability of estimating the mode Mh when the channel is in effective state Sj (at transmission time), averaged over all possible true channel states Sk (at estimation time).
The term Θ = H |
(f) |
H |
(e) |
ΠH |
(d) |
= |
M−1 |
( f ) |
M−1 |
(e) |
(d) |
is the probability of using |
|
|
|
h=0 |
hih |
k=0 |
hhk |
πk hk j |
mode Mi when the channel is in state Sj at transmission time, averaged over all possible
estimated modes Mh . The term diag(YΘ |
T |
) = |
M−1 |
(1 − ei j ) |
M−1 |
( f ) |
M−1 |
(e) (d) |
|
j=0 |
h=0 |
hih |
k=0 |
πk hhk hk j |
is the normalized average goodput vector representing the goodput when using mode Mi , averaged over all possible channel states at transmission time Sj . Finally, the average goodput is given by averaging the quantity above over all possible used modes, weighted by the transmit rate, thus removing the previous normalization by the product rT diag(YΘT), leading to Equation (4.17). The scalar normalized average goodput is obtained by summing the elements of the normalized average goodput vector:
¯ |
T |
) |
(4.21) |
Rr = |
diag(YΘ |
LINK LAYER CAPACITY OF ADAPTIVE AIR INTERFACES |
113 |
¯ r corresponds to the average goodput of a system adopting an hypothetical set of PHY
R
modes all having unitary transmission rate. The use of this quantity will be elaborated later. In the ideal case of perfect link adaptation, the channel quality metric is estimated without errors, tracked without delay, and communicated to the transmitter without errors, i.e. H(e) = H(d) = H(f) = I, Ω reduces to the identity matrix, and we have Θ = Π. As a result, under the assumptions defined above, the definition of average goodput given in Equations (4.17) and (4.18) reduces to the one of the ideal case, Equations (4.11) and (4.12). Single PHY mode systems are considered in this model as a special case with errorless feedback channel, H(f) = I, instantaneous estimation, H(d) = I, and static mode selection leading to a matrix H(e) having as nonzero elements all 1 in the ith row, if mode Mi is implemented in the system: h(hke) = δhi δkk , where δi j is the Kronecker delta.
4.1.10.1 System performance
For illustration purposes, we apply the above analysis tool to the study of a sample system and investigate its sensitivity to some imperfection or implementation constraints.
4.1.10.2 System parameters
The PHY modes include a no-transmission mode for values of the signal quality that do not comply with minimum service requirements. The modulation schemes used in the numerical analysis are BPSK, QPSK, 8QAM and 16QAM. The channel coding scheme used is the half rate convolutional code having generator polynomials g0 = 1338 and g1 = 1718, and constraint length K = 7. Coding gain curves for the half rate and punctured versions of that mother code, having ηc = 2/3 and ηc = 3/4, are obtained from standard sources [28, 29]. The minimum signal to interference-plus-noise ratio for the coded system, γmin, is obtained from BERmax = BER γmin , knowing the coding gain for the given channel coding scheme:
γmin = γmin/Gc. Inverses of the BER of all schemes can be efficiently obtained from the approximated parametric function BER γ , valid for all schemes [25], or by numerical
inversion of exact expressions [30]. In the system used for numerical analysis, switching thresholds are obtained from the required PER for a packet length of 2048 b.
We assume Ricean fading process [31]. The expression for the LCR for the case of a line- of-sight component with zero Doppler frequency, uncorrelated Gaussian noise components, and Jakes-shaped Doppler power spectral density or isotropic scattering can be found in [32, 33]. Under the assumptions above, and using the corresponding LCR, expressions (4.1) and (4.2) can be written as
√ |
|
|
|
|
|
qk,k+1 = fmaxσ0 |
|
π pξ (ξk+1; K f , σ0)/ Pξ (ξk , ξk+1; Kf, σ0) |
|||
and |
|
|
|
|
|
qk,k−1 = fmaxσ0 |
√ |
|
pξ (ξk ; K f , σ0)/ Pξ (ξk , ξk+1; Kf, σ0) |
||
|
|
π |
|||
where fmax is the maximum Doppler frequency, σ0 is the standard deviation of the quadrature Gaussian components, pξ (ξk ; K f , σ0) is the value of the PDF of the Ricean distribution having Rice factor Kf at signal level ξk , and Pξ (ξk , ξk+1; K f , σ0) is the difference of the Rice cumulative distribution function (CDF) at points ξk+1 and ξk .

114 ADAPTIVE AND RECONFIGURABLE LINK LAYER
Table 4.1 Channel model parameters
i |
|
πi |
|
|
Ni− |
Ni++1 |
λk |
μk |
||||
0 |
5.12 |
× |
10−2 |
|
— |
|
1.98 |
× |
10−1 |
3.86 |
— |
|
1 |
1.71 |
10−1 |
1.92 |
|
10−1 |
5.44 |
10−1 |
3.18 |
1.12 |
|||
× |
× |
× |
||||||||||
2 |
4.42 |
10−1 |
5.41 |
10−1 |
6.57 |
10−1 |
1.48 |
1.22 |
||||
× |
× |
× |
||||||||||
|
|
|
|
|
|
|
|
|
||||
3 |
3.05 |
× 10−1 |
6.58 |
× 10−1 |
1.20 |
× 10−1 |
0.394 |
2.16 |
||||
4 |
3.05 |
× |
10−2 |
1.27 |
× |
10−1 |
|
— |
|
— |
4.17 |
|
|
|
|
|
|
|
|
|
|
|
|||
State probabilities, level crossing rates downwards and upwards, and birth and death rates for the CTMC with five states used in the examples.
4.1.10.3 Channel model statistics
Parameters of the channel model for the example system are given in Table 4.1. Match of the statistics of the channel model is verified by comparing [34] the histogram obtained by simulation of the CTMC with the theoretical solution of the CTMC and with the theoretical PDF of the underlying fading process.
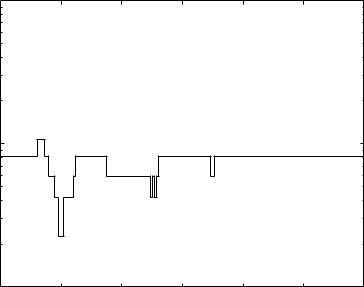
Figure 4.5 shows a snapshot of the time series obtained by simulations with above CTMC model with fmax = 300 Hz. It can be seen that very large changes in the metric (about one order of magnitude) occur in less than 1 ms around 3.5 ms, very rapid changes occur around 7 ms, and finally relatively long periods with steady values are seen on the right-hand side of the diagram. The system with fmax = 1 Hz simulated over 50 000 values, corresponding to a simulated time of tsim ≈ 4.6 h, exhibits τit,min ≈ 6.2 μs and τit,max ≈ 5.5 s as minimum and maximum of the inter-transition time, which depends on both the Doppler frequency of the fading process and the size of the signal quality regions.
4.1.11 Sensitivity of state probabilities to hysteresis region width
Consider the probability of staying in region Sk , πk . The kth state is entered by crossing levels γk + ϕk+ or γk−1 − ϕk−−1, when entering from below and above, respectively. This implies that in this case the actual width of the region is narrowed. Similarly, the state is left by crossing levels γk − ϕk− or γk−1 + ϕk+−1, when going below and above, respectively, and the actual width is now broadened. Although the ingress rate roughly equals the egress rate, as it can be seen in Table 4.1, the impact of hysteresis also depends on the state probabilities. In fact, the state probabilities after introducing the hysteresis can be written as:
(h) |
= |
(i,+) |
(i,−) |
(i+1,−) |
(i−1,+) |
πi−1 + o( CDF) |
(4.22) |
πi |
πi + CDF |
πi + CDF |
πi − CDF |
πi+1 − CDF |
|||
where π (h) |
and πi are the state probabilities with and without hysteresis, respectively, and |
||||||
i
(CDFi,±) is the half-width of the hysteresis region i at upper (+) and lower (−) side, respectively. In case of equal and symmetric hysteresis regions and neglecting higher order infinitesimals, we have
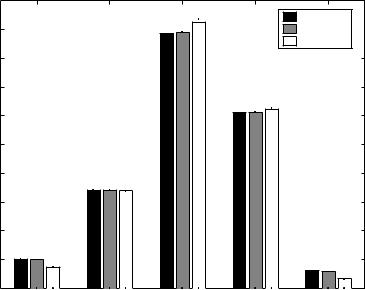
πi(h) ≈ πi + CDF (2πi − πi+1 − πi−1) |
(4.23) |
Figure 4.6 shows the sensitivity of state probabilities to CDF in this latter case, with regions defined as in Equation (4.6). For larger values of CDF, states with larger probability, the
LINK LAYER CAPACITY OF ADAPTIVE AIR INTERFACES |
115 |
Signal level
Simulated signal level
102
101
100
2 |
4 |
6 |
8 |
10 |
12 |
14 |
|
|
|
Time (s) |
|
|
x 10–3 |
Figure 4.5 Converted snapshot of a signal level, as a function of time, obtained from the time series generated by simulations with CTMC model for fmax = 300 Hz. It can be seen that very large changes in the metric (about one order of magnitude) occur in less than 1 ms around 3.5 ms, very rapid changes occur around 7 ms, and finally relatively long periods with steady values are seen on the right-hand side of the diagram.
central ones in our case, have their probability further increased by the introduction of hysteresis. It can be observed that up to about CDF = 10−3, state probabilities are almost unaffected.
4.1.12 Estimation process and estimate error
Under the assumption of constant noise power, the problem of studying the SINR is reduced to the study of the signal envelope. The envelope is estimated with an estimation error. The distribution of the estimation error depends on the specific adopted estimation technique and analytical and/or empirical distributions for estimation error are generally unknown [20]. For these reasons, and because we want to illustrate the model rather than to provide performance analysis for a specific scenario, no assumption is done here on the structure of the estimator. For the example below, we assume the error to be Gaussian distributed. Under these assumptions, it is easy to see that the generic element of matrix H(e), the probability of selecting mode Mh when the true state is Sk , can be written as:
|
|
|
|
¯ |
|
¯ |
|
||
h |
(e) |
= |
0.5 erfc |
inf(ξh ) − ξk |
− |
erfc |
sup(ξh ) − ξk |
(4.24) |
|
hk |
σe |
σe |
|||||||
|
|
|
|
||||||
116 ADAPTIVE AND RECONFIGURABLE LINK LAYER
|
|
State probabilities for various hysteresis region half-widths |
|
||
|
0.5 |
|
|
|
|
|
|
|
|
|
=1×10–6 |
|
|
|
|
|
CDF |
|
0.45 |
|
|
|
=1×10–3 |
|
|
|
|
CDF |
|
|
|
|
|
|
=1×10–2 |
|
|
|
|
|
CDF |
|
0.4 |
|
|
|
|
|
0.35 |
|
|
|
|
k |
|
|
|
|
|
p |
0.3 |
|
|
|
|
Stateprobability, |
|
|
|
|
|
0.2 |
|
|
|
|
|
|
0.25 |
|
|
|
|
|
0.15 |
|
|
|
|
|
0.1 |
|
|
|
|
|
0.05 |
|
|
|
|
|
0 |
1 |
2 |
3 |
4 |
|
0 |
||||
|
|
|
State index, k |
|
|
Figure 4.6 Sensitivity of state probabilities to CDF. Up to about CDF = 10−3, state probabilities are unaffected. For larger values of CDF, states with large probability, the central ones in our case, have their probability further increased by the introduction of hysteresis. Bars are simulated values, whereas points are the theoretical values given by Equation (4.23).
In Equation (4.24) erfc(g) is the error function complement, σe is the standard deviation of
the estimation error, ¯k is the nominal value of the metric in the kth interval Sk , and inf(ξh )
ξ
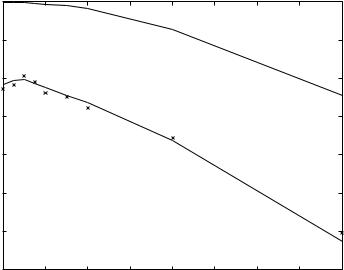
and sup(ξh ) are the lower and upper boundaries, respectively, of interval Sh . Figure 4.7 shows the comparison of simulation and theoretical results for the sensitivity of the average
goodput ¯ c on estimate errors, under the assumptions given above in the non-coherent case,
R
assuming absence of estimation delay and error-free feedback channel.
4.1.12.1 Channel process and estimation delay
The variability in time of the quality metric depends on both the fading characteristics (coherence time) and the width of the state regions and is expressed by the inter-transition time, i.e. the time between state changes. In order to simplify the analysis, we assume that the estimation delay is negligible compared with the minimum inter-transition time. For our analysis it is sufficient to assume that i [0, M − 1] λi τe = qi,i+1τe = 1 and μi τe = qi,i−1τe = 1, where M is the cardinality of sets of PHY modes and quality regions. For the Poisson process, the reciprocal of the transition rate is the mean inter-transition time. The previous constraint states basically that the estimation delay should be much smaller than the mean inter-transition time.
LINK LAYER CAPACITY OF ADAPTIVE AIR INTERFACES |
117 |
|
1 |
|
|
|
|
|
|
|
|
) |
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
(R |
0.98 |
|
|
|
|
|
|
|
|
goodput |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
average |
0.96 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
normalized |
0.94 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
), scalar |
0.92 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
|
|
|
(R |
|
|
|
|
|
|
|
|
|
goodput |
0.9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Average |
0.88 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.86 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
0 |
Variance of estimation error, s 2e
Figure 4.7 Sensitivity of average goodput to variance of channel estimation error. Average
goodput ¯ c (solid line), scalar normalized average goodput ¯ r (dashed line),
R R and simulations (crosses).
Under the previous assumptions, at most one state change can occur during τe, and the probability of channel state transition can be written as:
|
|
|
λi τe |
|
j = i |
+ 1 |
|
|||
h |
(d) |
= |
μi τe |
|
j = i − 1 |
(4.25) |
||||
|
i j |
0 |
| |
i |
− |
j |
| |
> 1 |
|
|
|
|
|
1 − λi τe − μi τe |
|
|
j = i |
|
|||
It is straightforward to see that
H(d) = I + Qτe |
(4.26) |
where Q is the rate matrix of the CTMC and I is the identity matrix. In particular, in case of instantaneous channel estimation, matrix H(d) reduces to the identity matrix. The probability of no transition from the ith state is 1 − (λi + μi )τe. This term is null for τe = 1/(λi + μi ). Therefore, the quantity
T |
|
min |
1 |
{1/(λi + μi )} |
c = i |
={ |
0,...,M |
||
|
|
− |
} |
has the meaning of coherence time in our model. Considering the case of perfect estimation and errorless feedback channel, and under the previous assumptions for the estimation delay model, the average goodput is expressed by:
¯ |
T |
T |
) = r |
T |
|
T |
τe |
Π] |
|
|
|
Rc(τe) = r |
|
diag(YΘ |
|
|
diag[Y I + Q |
|
|
||||
= r |
T |
diag(Y ) + τer |
T |
T |
|
¯ |
|
+ τe d |
(4.27) |
||
|
|
diag(YQ |
Π) = Rc(0) |
||||||||