

1.20. Центр тяжести твердого тела.
Центром тяжести твердого тела называется точка, через которую проходит линия действия равнодействующей сил тяжести частиц данного тела при любом положении тела в пространстве. Силы тяжести отдельных частиц тела образуют систему параллельных сил. Координаты центра тяжести как центра параллельных сил можно определить по формулам:
 ;
;
 ;
; ; (20.1)
; (20.1)
где
![]() ,
,![]() ,
,![]() - координаты точек приложенных сил
тяжести частиц тела.
- координаты точек приложенных сил
тяжести частиц тела.
Положение центра тяжести однородного тела зависит только от геометрической формы тела. Координаты центра тяжести пластины определятся формулами:
 ;
;
 ,
(20.2)
,
(20.2)
где
![]() - площадь всей пластины;
- площадь всей пластины;
![]() -
площадь части пластины.
-
площадь части пластины.
Аналогично можно выразить координаты центра тяжести линии:
 ;
;
 ;
; ,
(20.3)
,
(20.3)
где
![]() -
длина всей линии;
-
длина всей линии;
![]() -
длина участка линии.
-
длина участка линии.
При определении координат центра тяжести тела плоской формы, тело разбивают на конечное число частей, для каждой из которых положение центра тяжести известно и используют формулы (20.2) или (20.3). Например, координаты центра тяжести пластины, изображенной на рис.48, можно определить двумя способами:
Разбить пластину на прямоугольники
 ,
,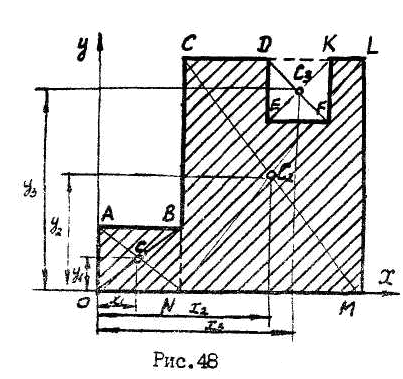
 и вырез
и вырез .
Тогда
.
Тогда
![]() ;
;
![]() ;
;
где
![]() ,
,![]() ,
,![]() - площади частей пластины и выреза.
- площади частей пластины и выреза.
2. Можно было
рассмотреть пластину
![]() ,
и из нее вычесть два выреза
,
и из нее вычесть два выреза![]() и
и![]() .
.
Тогда
 ;
;
Центры тяжести некоторых однородных тел.
Центр тяжести дуги окружности в силу симметрии лежит на оси
с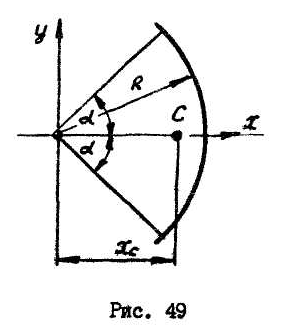 имметрии
(рис.49) и имеет координату:
имметрии
(рис.49) и имеет координату:
![]() ,
(20.4)
,
(20.4)
где
![]() - угол, измеряемый в радианах.
- угол, измеряемый в радианах.
Центр тяжести площади кругового сектора лежит на оси
с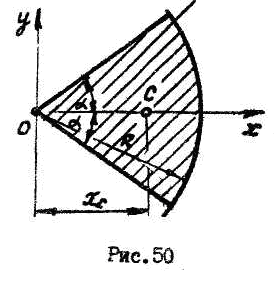 имметрии
(рис.50) и имеет координату:
имметрии
(рис.50) и имеет координату:
![]() .
(20.5)
.
(20.5)
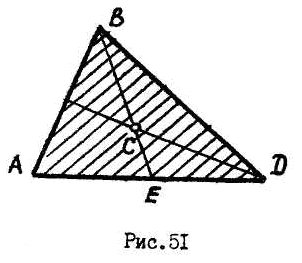
Центр тяжести треугольника лежит в точке пересечения медиан:
![]() .
.
Пример №12.
Определить
положение центра тяжести автокрана и
статические нагрузки на его передний
![]() и задний
и задний![]() спаренные колесные хода, если общая
масса автокрана
спаренные колесные хода, если общая
масса автокрана![]() ,
масса шасси
,
масса шасси![]() ;
масса стрелы
;
масса стрелы![]() ;
кабины крановщика с поворотным устройством
;
кабины крановщика с поворотным устройством![]() .
Размеры приведены на рис.52а.
.
Размеры приведены на рис.52а.
Р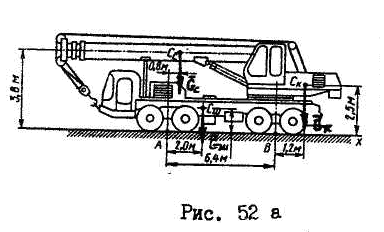 ешение:
ешение:
Данные для определения координат центра тяжести сведены в табл. 2.
|
Элемент |
Масса
|
Координаты центра тяжести |
| ||||
|
|
|
|
| ||||
|
Кабина крановщика с поворотным устройством |
4,8 |
7,6 |
2,5 |
36,48 |
12,0 | ||
|
Шасси |
7,2 |
2,0 |
1,4 |
14,4 |
10,08 | ||
|
Стрела |
4,0 |
0,8 |
3,8 |
3,2 |
15,2 | ||
|
Сумма |
16,0 |
|
|
54,08 |
37,28 | ||
![]() ;
;
![]() .
.
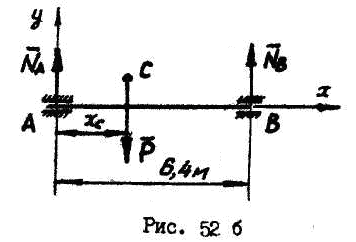
Для определения
статических нагрузок на передний
![]() и задний
и задний![]() спаренные колесные хода составим
расчетную схему (рис.52б). Для плоской
системы параллельных сил составим два
уравнения равновесия:
спаренные колесные хода составим
расчетную схему (рис.52б). Для плоской
системы параллельных сил составим два
уравнения равновесия:
![]()
![]()
![]() (1)
(1)
![]() (2)
(2)
Тогда
из (2):
![]()
из (1):
![]()
К И Н Е М А Т И К А
2.1. Предмет и задачи кинематики.
Кинематика - раздел механики, который изучает геометрические свойства механического движения тел без учета их массы и причин, вызывающих движение. Под механическим движением понимается происходящее с течением времени перемещение точек и тел в пространстве. При движении твердого тела его точки могут двигаться различно, поэтому изучение кинематики начинается с изучения-движения самого простого объекта - материальной точки.
Положение точки в пространстве определяется относительно системы отсчета, за которую может быть принято какое-то твердое тело и связанная с ним система координат.
Задачи, решаемые методами кинематики точки, можно разделить на следующие типы:
определение траектории движения точки;
определение скорости и ускорения точки по заданному закону движения - прямая задача кинематики;
определение закона движения точки в выбранной системе отсчета - обратная задача кинематики.
СПОСОБЫ ЗАДАНИЯ ДВИЖЕНИЯ ТОЧКИ.
Определить движение точки - это значит определить положение этой точки в любой момент времени по отношению к выбранной системе отсчета.
Кривая, которую описывает точка при своем движении в пространстве относительно выбранной системы отсчета, называется траекторией (рис. 53,54).
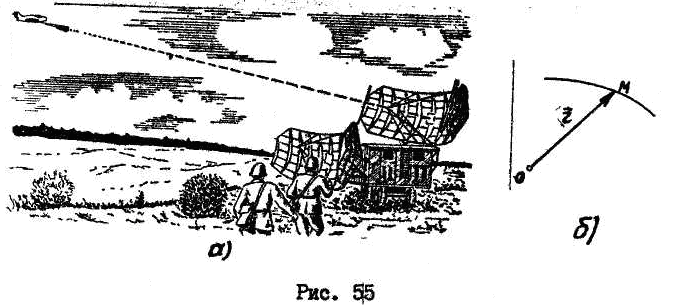
Движение точки можно задать векторным, координатным и естественным способами.
При
векторном
способе
положение
точки
![]() задается
радиусом
-
вектором
задается
радиусом
-
вектором
![]() ,
проведенным
из
некоторой
неподвижной
точки
О
(рис.
55). Каждому
моменту
времени
соответствует
новое
значение
радиуса
– вектора
,
проведенным
из
некоторой
неподвижной
точки
О
(рис.
55). Каждому
моменту
времени
соответствует
новое
значение
радиуса
– вектора
![]() .
Следовательно, для векторного способа
задания движения уравнение движения
точки имеет вид:
.
Следовательно, для векторного способа
задания движения уравнение движения
точки имеет вид:
![]() (2.1)
(2.1)
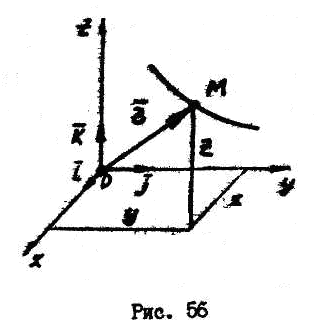
В декартовой
системе координат
![]() (рис.56) положение точки определяется
тремя ее координатами, изменяющимися
во времени. Тогда в координатной форме
уравнения движения точки будут иметь
следующий вид:
(рис.56) положение точки определяется
тремя ее координатами, изменяющимися
во времени. Тогда в координатной форме
уравнения движения точки будут иметь
следующий вид:
![]() ,
,
![]() ,
,![]() (2.2)
(2.2)
 Если точка движется
в плоскости
Если точка движется
в плоскости
![]() ,
будем иметь два уравнения движения:
,
будем иметь два уравнения движения:
![]() ,
,
![]() (2.3)
(2.3)
При прямолинейном движении точки прямую, по которой движется точка принимаем за ось координат. Уравнение движения точки имеет вид:
![]() .
(2.4)
.
(2.4)
Между
векторным
и
координатным
способами
задания
движения
существует
непосредственная
связь.
Координаты
точки
![]() являются
проекциями
на
оси
координат,
ее
радиуса-вектора
являются
проекциями
на
оси
координат,
ее
радиуса-вектора
![]() ,
а
сам
радиус-вектор
можно
определить
через
его
проекции
на
координатные
оси:
,
а
сам
радиус-вектор
можно
определить
через
его
проекции
на
координатные
оси:
![]() ,
(2.5)
,
(2.5)
где
![]() ,
,![]() ,
,![]() -
орты
координатных
осей
-
орты
координатных
осей
![]() ,
,
![]() ,
,![]() .
.
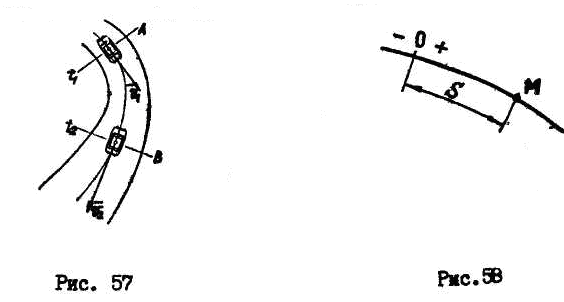
Естественный способ задания движения точки используется, если точка движется по криволинейной траектории (рис. 57). В этом случае для точки должны быть известны траектория движения, начало отсчета, направление отсчета.
Принимая
за
начало
отсчета
точку
![]() и
выбрав
положительное
направление
отсчета,
положение
точки
и
выбрав
положительное
направление
отсчета,
положение
точки
![]() в
любой
момент
времени
можно
определить
дуговой
координатой
в
любой
момент
времени
можно
определить
дуговой
координатой
![]() ,
которая
изменяется
с
течением
времени
(рис.58).
,
которая
изменяется
с
течением
времени
(рис.58).
Уравнение движения точки в естественной форме будет иметь вид:
![]() .
(2.6)
.
(2.6)
Взаимосвязь между координатным и естественным способами задания движения точки можно установить через дифференциал дуговой координаты:
![]() ,
(2.7)
,
(2.7)
где
![]() ,
,![]() ,
,![]() - дифференциалы координат точек;
- дифференциалы координат точек;
![]() ,
,
![]() ,
,![]() (2.8)
(2.8)
После интегрирования
(2.7) в интервале времени от
![]() до
до![]() получим:
получим:
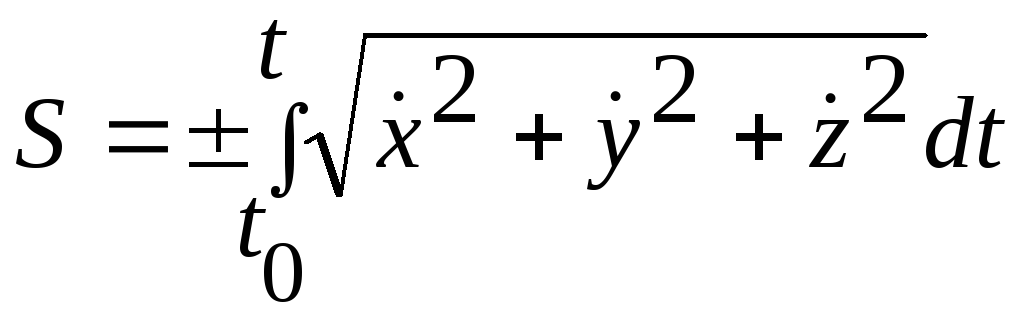 (2.9)
(2.9)
Знак плюс соответствует движению в положительном направлении отсчета дуговой координаты, знак минус – положительному направлению. В формулах (2.8) и (2.9)
![]() ,
,![]() ,
,![]() -
производные по времени от соответствующих
координат (см. формулы 2.13).
-
производные по времени от соответствующих
координат (см. формулы 2.13).
ОПРЕДЕЛЕНИЕ ТРАЕКТОРИИ ДВИЖЕНИЯ ТОЧКИ.
Пример №1.
Кривошип
![]() вращается с постоянной угловой скоростью
вращается с постоянной угловой скоростью![]() .
Найти траекторию движения средней точки
.
Найти траекторию движения средней точки![]() шатуна, если
шатуна, если![]() .
В начальный момент времени ползун
.
В начальный момент времени ползун![]() находиться в крайнем правом положении.
Начало координат поместить в точку
находиться в крайнем правом положении.
Начало координат поместить в точку![]() .
.
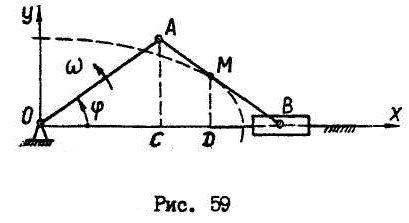
Положение механизма
определяется углом поворота
![]() ведущего звена – кривошипа
ведущего звена – кривошипа![]() ,
изменяющимся во времени по закону
,
изменяющимся во времени по закону![]() .
.
В выбранной системе
отсчета выразим координаты точки
![]() :
:
![]()
![]() .
(1)
.
(1)
С учетом исходных данных уравнения (1) примут вид:
![]()
![]() .
(2)
.
(2)
Уравнения (2)
определяет закон движения точки
![]() .
Для нахождения уравнения траектории
из уравнений движения необходимо
исключить параметр
.
Для нахождения уравнения траектории
из уравнений движения необходимо
исключить параметр![]() :
:
![]() ,
,
![]() .
.
Возведем в квадрате и сложим:
![]() .
.
Следовательно,
средняя точка
![]() шатуна движется по замкнутой эллиптической
траектории с центром в точке
шатуна движется по замкнутой эллиптической
траектории с центром в точке![]() и полуосям:
и полуосям:
![]() ,
,
![]() .
.