

4 Моделирование процесса квантования по времени
Из ранее названных видов квантования по времени наиболее просто моделируется процесс амплитудно-импульсной модуляции. Схема для проведения виртуального эксперимента изображена на рисунке 20.
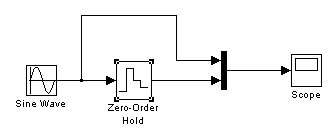
Рисунок 20 – Схема S-модели
Блок Zero-Order Hold (фиксатор нулевого порядка) находится в разделе Discrete библиотеки Simulink и по своим характеристикам полностью эквивалентен АИ-модулятору, схема которого показана на рисунке 10. Единственным параметром настройки названного блока является sample time T (период квантования или период дискретизации). Результат квантования по времени гармонического сигнала АИ-модулятором при принятом периоде квантования T = 1 изображен на рисунке 21.

Рисунок 21 - Осциллограммы непрерывного и квантованного по времени сигналов
Очевидно, что погрешность преобразования непрерывного сигнала равна нулю только в моменты квантования T, 2T, 3T и т.д. При больших значениях периода квантования T выходной сигнал приобретает ярко выраженную форму ломаной линии. Наоборот, при T→0 форма квантованного сигнала приближается к форме непрерывного сигнала.
МОДЕЛИРОВАНИЕ ПРОЦЕССА КОДО-ИМПУЛЬСНОЙ МОДУЛЯЦИИ
В системе MATLAB моделирование процесса кодо-импульсной модуляции возможно с помощью блоков Digital Signal Processing Blockset (цифровая обработка сигналов), размещенного в Simulink [1]. Схема для проведения виртуального эксперимента изображена на рисунке 22.

Рисунок 22 – Схема S-модели
Необходимые блоки Quantizer (квантователь), Uniform Encoder (шифратор) и Uniform Decoder (дешифратор) размещены в разделе Quantizers библиотеки DSP Blockset. Блок Time Scope находится в разделе DSP Sinks.
Исследуемый процесс кодо-импульсной модуляции (квантование по времени, квантование по уровню, кодирование) моделируется двумя блоками Quantizer и Uniform Encoder. Квантователь подобен квантователю из раздела Nonlinear библиотеки Simulink и настраивается аналогично. Этот блок квантует непрерывный сигнал по уровню и по времени. Второй блок Uniform Encoder кодирует квантованный сигнал.
Блок Uniform Decoder, моделирующий ЦАП, дешифрует кодированный сигнал и преобразует его в ступенчатую функцию, показанную на рисунке 23.

Рисунок 23 – Осциллограммы непрерывного и квантованного сигналов
Блоки Encoder и Decoder имеют одинаковые параметры настройки, из которых существенным является Bits (разрядность). По умолчанию разрядность равна 8 и 3 соответственно. При этом значении исследуемый процесс преобразования сигналов отличается самым низким качеством. Пользователь имеет возможность повысить разрядность до 32 бит.
В схеме виртуального эксперимента отсутствует модель ЦВМ. Как элемент цифровой САУ (рисунок 15) ЦВМ выполняет алгоритмические функции и в процессе модуляции и демодуляции не участвует. Поэтому моделирование кодо-импульсной модуляции проводят с помощью названной схемы (рисунок 22).
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
Ознакомиться с целью работы.
Ознакомиться с основными понятиями о дискретных САУ, см.раздел 2.
6.3 Перечертить в отчет схему S-модели согласно рисунку 16.
6.4 Запустить последовательно MATLAB и SIMULINK.
6.5 Создать S-модель согласно рисунку 16.
6.6 Принять по умолчанию шаг квантования по уровню Quantization interval =0.5.
Наблюдать изображения непрерывного и квантованного сигналов.
Перечертить в отчет изображения названных сигналов длительностью в один период.
Повторить виртуальный эксперимент, приняв шаг квантования по уровню 0.1. Выполнить указания 6.7-6.8.
Перечертить в отчет схему, изображенную на рисунке 18.
Заменить блок Quantizer S-модели на блок Relay.
Настроить блок Relay, приняв порог включения 0.5 и порог выключения (-0.5), а также выходной сигнал реле в выключенном состоянии -1.
Повторить виртуальный эксперимент, уменьшив порог включения до 0.1 и порог выключения до -0.1.
Выполнить указания 6.7-6.8.
Перечертить в отчет схему, изображенную на рисунке 20.
Заменить блок Relay S-модели на блок Zero-Order Hold(ZOH).
Принять по умолчанию при настройке блока ZOH период квантования по времени T=1.0.
Выполнить указания 6.7-6.8.
Перечертить в отчет схему, изображенную на рисунке 22.
Принять по умолчанию при настройке блоков Encoder и Decoder разность Bits=8 и 3 соответственно.
Выполнить указания 6.7-6.8.
Повторить виртуальный эксперимент, увеличив разрядность до Bits =32.
Выполнить указания 6.7-6.8.
Закрыть SIMULINK и MATLAB.
СВЕДЕНИЯ ОБ ИСПОЛЬЗОВАНИИ СИСТЕМЫ MATLAB
Методические указания к выполнению данной работы опираются на систему MATLAB 6.0 (Release 12) с пакетом расширения Simulink 4.0.
CОДЕРЖАНИЕ ОТЧЕТА
Цель работы.
Схема S-модели, см. рисунок 16.
Изображения непрерывного и квантованного по уровню сигналов (шаг квантования 0.5 и 0.1), см. рисунок 17.
Схема S-модели, см. рисунок 18.
Изображения непрерывного и квантованного по уровню сигналов (порог включения 0.5 и 0.1), см. рисунок 19.
Схема S-модели, см. рисунок 20.
Изображения непрерывного и квантованного по времени сигналов (период квантования T=1 и T=0.1), см. рисунок 21.
Схема S-модели, см. рисунок 22.
Изображения непрерывного и квантованного по времени и по уровню сигналов (разрядность 3 и 32 бита), см. рисунок 23.
КОНТРОЛЬНЫЕ ВОПРОСЫ
Какие САУ называют дискретными?
Что понимают под дискретизацией (квантованием) сигналов?
Каковы основные виды квантования сигналов?
Каковы особенности процесса квантования сигнала по уровню?
Каковы особенности процесса квантования сигнала по времени?
Почему квантование сигнала по времени называют модуляцией?
Каковы основные виды модуляции сигналов?
Что понимают под амплитудно-импульсным модулятором?
Каковы особенности кодо-импульсной модуляции?
К какому виду квантования относят преобразование сигнала релейным элементом?
ЛИТЕРАТУРА
Дьяконов В.П. Simulink 4. Специальный справочник.- СПБ.:Питер,2002.-528с.
Зайцев Г.Ф. и др. Основы автоматического управления и регулирования .- 2-е изд., перераб. и доп. – К.: Техника, 1997.- С.307-310.
Иванов В.А., Ющенко А.С. Теория дискретных систем автоматического управления.- М.: Наука, 1983.- С.9-18.
Каганов В.Ю. и другие. Основы теории и элементы систем автоматического регулирования. – М.: Металлургия, 1987.- С.102-105.
Ким Д.П. Теория автоматического управления. Т.1. Линейные системы.- М.:ФИЗМАТЛИТ, 2003.- С. 190-191, 207-209, 216-217.
Попов Е.П. Теория нелинейных систем автоматического регулирования и управления.- М.:Наука, 1979.- С.214-216.
Теория автоматического регулирования. В 3-х кн./ Под ред. В. В. Солодовникова. Кн.2: Анализ и синтез линейных непрерывных и дискретных систем автоматического регулирования / А.Н. Дмитриев и др.- М.: Машиностроение, 1967.- С.517-529.
Теория автоматического управления: В 2-х ч. Ч.2. Теория нелинейных и специальных систем автоматического управления/ А.А. Воронов и др.; Под ред. Воронова А.А.- 2-е изд., перераб. и доп. –М.: Высш.шк.,1986.-С.73-77.
Черных И.В. SIMULINK: среда создания инженерных приложений.- М.:ДИАЛОГ-МИФИ, 2003. -496с.
Юревич Е.И. Теория автоматического управления.- 2-е изд., перераб. и доп.- СПб.:Энергия,1975.- С.250-251, 260-265, 283-284.