

5.3 Плоскопараллельное движения твердого тела (задача к 2)
5.3.1 Порядок решения задач при определении
кинематических параметров плоского движения твердого тела
Решение задач на плоское движение твердого тела рекомендуется выполнять в следующей последовательности:
изобразить механизм в заданном положении, соблюдая заданные углы и размеры звеньев;
установить виды движений звеньев механизма;
определить скорость точки ведущего звена механизма;
найти положения МЦС звеньев, совершающих плоское движение;
определить расстояния от МЦС до точек механизма, скорости которых необходимо рассчитать по условию задачи, и вычислить эти скорости из соответствующих пропорций;
проверить найденные скорости точек механизма, используя теорему о проекциях скоростей двух точек на прямую, соединяющую эти точки;
используя метод полюса, найти ускорения точек А и В механизма и угловую ускорение звена АВ;
5.3.2 Условие задачи к 2
Плоский механизм (рисунки 15, 16, 17, 18) состоит из трех или четырех стержней и одного или двух ползунов.
Для всех вариантов принять:
-
угловая скорость кривошипа О1А:
![]() 1
= 2, 0 с-1;
1
= 2, 0 с-1;
- длина стержней механизма:
![]() 1
= 0,4 м;
1
= 0,4 м;
![]() 2
= 1,5 м;
2
= 1,5 м;
![]() 3
= 1,2 м;
3
= 1,2 м;
![]() 4=
0,6 м; АС = ВС.
4=
0,6 м; АС = ВС.
В
соответствии с заданными кинематическими
параметрами ведущего звена механизма
определить:
![]()
скорости указанных на рисунке точек и угловые скорости звеньев методом МЦС;
проверить найденные скорости точек, используя теорему о проекциях скоростей двух точек на прямую их соединяющую;
ускорения точек А и В механизма и угловое ускорение звена 2 методом полюса.
5.3.3 Пример решения задачи к 2
Исходные данные к расчету :
Угловая
скорость кривошипа
![]()
![]() .
.
Длины
стержней :
![]() .
.
Определить кинематические параметры движения точек и звеньев механизма в соответствии с условием задачи.
Решение
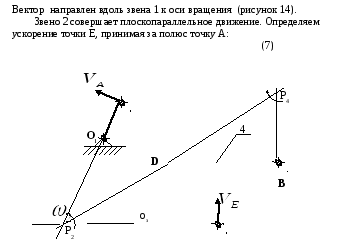
Изобразим механизм в заданном положении, соблюдая заданные углы и размеры звеньев (рисунок 12). Механизм рекомендуется изобразить в масштабе М 1:10.
1
600
А

![]()







600
4
О1

B
1200




D
2






























Е
О3
600







3

Рисунок 12
Определяем скорости точек и угловые скорости звеньев механизма.
Звено
![]() совершает вращательное движение. Зная
угловую скорость
совершает вращательное движение. Зная
угловую скорость![]() звена
звена![]() ,
определим скорость точки А:
,
определим скорость точки А:![]() .
Вектор
.
Вектор![]()
![]() направлен перпендикулярно звену 1 в
сторону его вращения.
направлен перпендикулярно звену 1 в
сторону его вращения.
Звено
АЕ совершает плоскопараллельное
движение. Точка Е принадлежит одновременно
этому звену, совершающему плоскопараллельное
движение и звену ЕО2,
вращающемуся вокруг оси, проходящей
через точку
![]() .
Так как направление скоростей
.
Так как направление скоростей![]() и
и![]() двух точек звена 2 известны, то мгновенный
центр скоростей (МЦC)
звена – точка
двух точек звена 2 известны, то мгновенный
центр скоростей (МЦC)
звена – точка
![]() находится на пересечении перпендикуляров
проведенных к векторам скоростей
находится на пересечении перпендикуляров
проведенных к векторам скоростей![]() и
и![]() .
Скорости точек пропорциональны их
расстояниям до МЦС и связаны соотношением
.
Скорости точек пропорциональны их
расстояниям до МЦС и связаны соотношением
![]() .
(5)
.
(5)
Так
как
![]() -
равносторонний, то
-
равносторонний, то![]() ,
и тогда
,
и тогда
Направление
угловой скорости
![]() определим по направлению вектора
определим по направлению вектора![]() скорости точки А. ТочкаD
так же принадлежит звену 2. Вектор
скорости точки А. ТочкаD
так же принадлежит звену 2. Вектор
![]()
![]() скорости точкиD
направлен перпендикулярно отрезку DP2
в сторону, соответствующую направлению
угловой скорости
скорости точкиD
направлен перпендикулярно отрезку DP2
в сторону, соответствующую направлению
угловой скорости
![]() (рисунок
13).
(рисунок
13).
В
![]() отрезокDP2
является высотой :
отрезокDP2
является высотой :
![]() .
.
Тогда
![]() .
.
Вектор
![]() скорости
точкиD
направлен перпендикулярно отрезку DP2
в сторону, соответствующую направлению
угловой скорости
скорости
точкиD
направлен перпендикулярно отрезку DP2
в сторону, соответствующую направлению
угловой скорости
![]() звена
2.
звена
2.
Скорость точки Е звена 2 можно определить, используя теорему о проекциях скоростей двух точек. Проекции скоростей двух точек на прямую, их соединяющую (на прямую АЕ), равны между собой:
![]() .
.
Откуда
![]() =
=![]() =3м/с.
=3м/с.
Угловую скорость звена 3, вращающегося
вокруг неподвижной оси
![]() ,
определим по известной скорости точки
Е:
,
определим по известной скорости точки
Е:
![]() .
.
Звено
АЕ совершает плоскопараллельное
движения. Скорость точки D
известна по модулю и направлению. Ползун
В движется в горизонтальных направляющих,
следовательно , направление вектора
![]() скорости точки В известно. МЦС звена 4
– точка
скорости точки В известно. МЦС звена 4
– точка![]() находится на пересечении перпендикуляров,
проведенных к векторам
находится на пересечении перпендикуляров,
проведенных к векторам![]() и
и![]() .
Скорости точек Д и В связаны соотношением
.
Скорости точек Д и В связаны соотношением
![]() .
(6)
.
(6)
Из
![]() находим
находим![]() ;
;
![]() .
.
Тогда
![]() .
.
Направление
угловой скорости
![]() определяем по направлению вектора
скорости
определяем по направлению вектора
скорости![]() :
:![]() .
.
Скорость
точки В найдем по теореме о проекциях
скоростей точки D
и В на прямую ВD:
![]() ;
;
![]() .
.
Теперь
определим ускорение точек А и Е и угловое
ускорения звена АЕ. Звено
![]() равномерно вращается вокруг оси
равномерно вращается вокруг оси![]() ,
поэтому ускорение точки А будет
представлено только его нормальной
составляющей
,
поэтому ускорение точки А будет
представлено только его нормальной
составляющей
![]() .
.
1
Е
3
2
А
![]()
![]()
![]()










































Рисунок 13
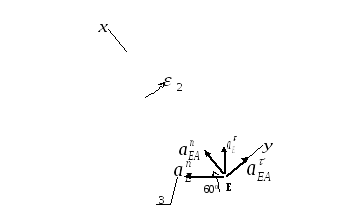
Так как точка Е принадлежит вращающемуся звену 3, ускорение точки Е будет представлено двумя составляющими :
![]() ,
(8)
,
(8)
где
![]() ;
;
![]() .
.
Вектор
![]() направлен вдоль звена 3 к оси вращения
направлен вдоль звена 3 к оси вращения![]() .
Вектор
.
Вектор
![]() направлен
перпендикулярно нормальной составляющей
ускорения
направлен
перпендикулярно нормальной составляющей
ускорения
![]() (рисунок 14).
(рисунок 14).
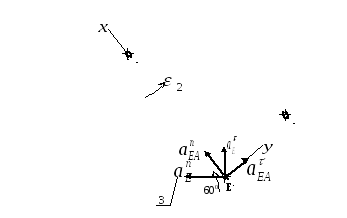
Ускорение
во вращательной составляющей плоского
движения
![]() так же представлено двумя составляющими
:
так же представлено двумя составляющими
:
![]() ,
(9)
,
(9)
где
![]()
B
D
О3
600
600
1200
1
4
2
А
О1
![]()
![]()

















































Рисунок 14
Вектор
![]() направлен от точки Е к полюсу – точке
А. Вектор
направлен от точки Е к полюсу – точке
А. Вектор![]() направлен перпендикулярно нормально
составляющей. С учетом уравнений (8) и
(9) равенство (7) примет вид :
направлен перпендикулярно нормально
составляющей. С учетом уравнений (8) и
(9) равенство (7) примет вид :
![]() .
(10)
.
(10)
В
векторном равенстве (10) ускорение
![]() и
и
![]() известны только по направлению, остальные
векторы определены по модулю и по
направлению. Для нахождения неизвестных
величин спроецируем равенство (6) на две
взаимно перпендикулярные оси Х и Y,
направляя ось Х вдоль звена АЕ.
известны только по направлению, остальные
векторы определены по модулю и по
направлению. Для нахождения неизвестных
величин спроецируем равенство (6) на две
взаимно перпендикулярные оси Х и Y,
направляя ось Х вдоль звена АЕ.
На
ось Х :
![]() .
.
Откуда
![]() .
.
Знак
минус показывает, что действительное
направление вектора
![]() противоположно
принятому первоначально.
противоположно
принятому первоначально.
На ось Y :
![]() .
.
Откуда
![]()
Угловое
ускорение звена АЕ :![]() .
.
Направление
углового ускорения
![]() определяем по направлению вектора
определяем по направлению вектора![]() .
.
Полное ускорение точки Е найдем по формуле
![]() .
.