

Автоматика
.pdfПри смещении распределительного золотника влево рабочая жидкость попадает по каналу 1- в левую полость силового гидроцилиндра 14, а правая полость гидроцилиндра каналом 13 соединяется со сливом. Под действием рабочей жидкости поршень гидроцилиндра перемещается вправо. При смещении управляющего золотника вправо распределительный золотник также смещается вправо, а поршень силового гидроцилиндра влево.
У двухкаскадного гидроусилителя первый каскад выполнен по схеме сопло заслонка (рис.3.3, б). Гидроусилителем управляет электромагнит 2.
Рабочая жидкость из напорной магистрали по каналу 11 подводится к распределительному золотнику 9 и одновременно через дроссели 5 к системе управления - соплам 4, разделенным управляющей заслонкой 3. Если сигнал от датчика отсутствует, заслонка 3 под действием пружин 1 занимает среднее положение. Давление в камерах 8 и 10 распределительного золотника при этом одинаковое, и золотник под действием пружин 7 занимает среднее нейтральное положение.
При появлении сигнала от датчика заслонка 3 смещается и соотношение зазоров между соплами и заслонкой изменяется. Одновременно изменяется давление в камерах 8 и 10, в одной увеличивается, в другой уменьшается. Под действием разности давлений золотник перемещается на величину, определяемую перепадом давления и суммарной жесткостью пружин 7. При перемещении золотника рабочая жидкость поступает к силовому гидроцилиндру и его поршень совершает рабочий ход.
3.2 Электрические усилители
В системах электро автоматики большое распространение получили электрические реле. Реле срабатывает от сравнительно слабого сигнала, но включает при этом электрическую цепь, по которому проходит ток значи73
тельной величины. Это - промежуточное звено между цепью слабого тока и цепью значительно большей мощности. При действии на реле электрического сигнала чувствительного элемента системы автоматики они в основном приводят в действие одну или несколько управляемых электрических цепей.
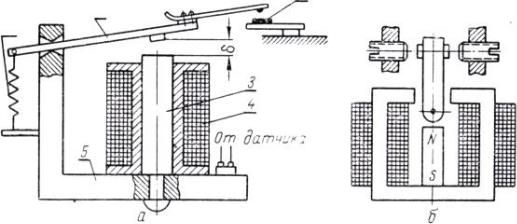
Наиболее распространены электромагнитные реле (рис. 3.4).
Принцип их действия базируется на притягивании стального якоря 1 к
сердечнику 3 электромагнита, по обмотке 4 которого пропускают управляющий электрический ток. Если тока в управляющей цепи нет, якорь оттягивается от сердечника возвратной пружиной 6. Когда управляющий сигнал замыкает электрическую цепь катушки, создаваемый ею магнитный поток проходит через сердечник, ярмо 5, якорь и воздушный зазор б между якорем и сердечником. При этом создается усилие, которое притягивает якорь к сердечнику, и контакты 2 цепи, ведущей к исполнительному органу,
замыкаются.
Такие реле называются нейтральными электромагнитными реле.
В системах автоматики применяют также поляризованные электромагнитные реле. Преимущество их в том, что направление перемещения якоря зависит от полярности подаваемого на обмотку напряжения и поляризованные реле являются реверсивными элементами. Это особенно ценно при использовании реле в системах автоматического регулирования, когда знак подаваемого напряжения определяется знаком рассогласования.
Эту реверсивность создает вспомогательный источник энергии (магнит или электромагнит), поляризующий магнитную систему.
74
Рис.3.4 - Электромагнитные реле:
а - нейтральное: б - поляризованное; 1 - якорь; 2 - контакты испол-
нительной цепи; 3 - сердечник электромагнита; 4 - обмотка катушки; 5 - ярмо; 6 - возвратная пружина.
Для управления такими реле требуется небольшая мощность.
Поляризованное реле, (показанное на рисунке 3.4, б) имеет два симметричных магнитных контура. Подвижная система (якорь) располагается в общей ветви и реагирует на разность усилий, созданных потоками каждого из магнитных контуров. Если тока в обмотке нет, на якорь действует только поток постоянного магнита.
Обмотки подключаются к источнику питания так, что направление потока в одной половине зазора совпадает с направлением потока постоянного магнита, а в другой не совпадает. Под действием суммарного усилия якорь перемещается к одному из полюсов. При изменении направления тока якорь переместится к другому полюсу.
Эти электромагнитные реле имеют существенные недостатки, в первую очередь некоторое запаздывание срабатывания, обусловленное наличием подвижных инерционных масс, и ограниченное число переключений в единицу времени.
75
Впоследнее время в системах автоматики при управлении быстро протекающими процессами, требующими большой точности момента срабатывания или большой частоты срабатывания, применяют бесконтактные электронные реле. Их электрическая цепь имеет только два состояния равновесия. Поэтому при подаче небольших управляющих напряжений величина напряжения в цепи резко переходит из одного равновесного состояния
вдругое, что аналогично замыканию или размыканию контактов электромагнитного реле.
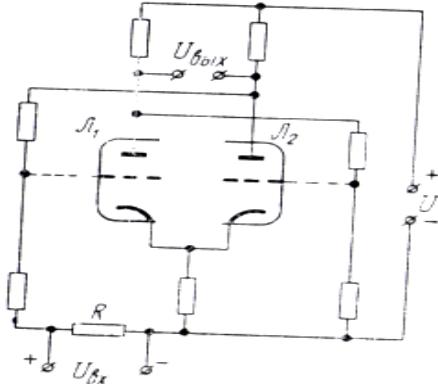
Всвязи с отсутствием подвижных деталей такие реле практически безинерционные и обеспечивают любую частоту срабатываний в единицу времени. Для управления такими реле требуется небольшая мощность (10-6 -10- 9 Вт ). На выходе реле может быть получена мощность до 1 Вт. Для скачкообразного перехода из одного состояния в другое в схеме (рис. 3.5)
должны быть нелинейные элементы. В данном случае это два триода (лампы) Л1
и Л2. Действие схемы основано на том, что в каждый данный момент анодный ток может протекать только через одну лампу.
76
Рис. 3.5 - Схема бесконтактного электронного реле.
Если подать на сопротивление R напряжение сигнала Uвx такой полярности,
чтобы оно добавлялось к напряжению питания U, лампа Л1, окажется отпертой, а
лампа Л2 - запертой. Если же на вход системы подать ток другой полярности,
произойдет обратный скачок тока. Такое реле работает аналогично поляризованному.
Фотореле предназначено для подачи сигнальных импульсов при изменении окружающей освещенности. В сельском хозяйстве такие реле используют для автоматического включения дополнительного освещения птицеферм, перевода обогрева парников и теплиц на дневной или ночной режим и т. д.
Вкачестве датчиков используют фотоэлементы. Различают фотоэлементы:
свнешним фотоэффектом (вакуумные и газонаполненные), с внутренним фотоэффектом (фотосопротивления), фотодиоды и фототриоды. В
сельскохозяйственном производстве наиболее распространены фотоэлементы с внутренним и внешним фотоэффектом.
Фотосопротивление - это полупроводниковый прибор, уменьшающий свое электрическое сопротивление под действием лучистого потока. Ток через фотосопротивление может проходить в любом направлении.
Действие фотоэлемента с внешним фотоэффектом основано на том, что при попадании на его поверхность света в окружающее пространство вылетают электроны.
Фотоэлементы обладают большой чувствительностью, но абсолютные значения получаемых от них фототоков обычно очень незначительны. В связи с этим в автоматических системах обычно используют фотоэлектронные реле,
представляющие собой комбинацию фотоэлемента с усилительной электронной
77
лампой, в анодную цепь которой включается обмотка электромагнитного реле с большим сопротивлением.
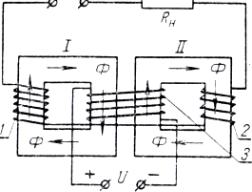
Магнитный усилитель (рис. 3.6) состоит из двух дросселей I и II,
которые подмагничиваются постоянным током. Магнитная проницаемость ферромагнитных материалов при переменном токе зависит от величины подмагничивающего действия постоянного тока. Обмотки 1 и 2 переменного тока обоих дросселей намотаны на оба сердечника так, что направления переменных магнитных потоков во внутренних сердечниках противоположны. Поэтому электродвижущие силы, индуктированные в обмотке
3 постоянного тока переменными магнитными потоками Ф, взаимно компенсируются.
Выходная величина магнитного усилителя -напряжение U обмотки 3
постоянного тока. Эта обмотка называется управляющей, или подмагничивающей. Выходная величина магнитного усилителя переменный ток в обмотках 1, 2 и в нагрузочном сопротивлении RH.
Рис. 3.6 - Схема магнитного усилителя:
1 , 2 — обмотки переменного тока 3 — обмотка постоянного тока.
Протекающий по обмотке управления постоянный ток меняет насыщение сердечника. С увеличением силы тока уменьшается магнитная проницаемость и реактивное сопротивление катушек 1 и 2, а величина тока I растет.
78

Электромагнитный усилитель представляет собой генератор постоянного тока, приводимый во вращение каким-либо двигателем.
Индуктируемая в обмотке якоря генератора электродвижущая сила пропорциональна величине магнитной индукции и числу оборотов машины.
Меняя магнитное поле электромагнитов статора, можно в широких пределах изменять величину электродвижущей силы, а следовательно, и мощности,
отдаваемой генератором во внешнюю цепь.
В электромашинном усилителе ток от чувствительного элемента
(датчика) подводится к обмотке возбуждения, создавая определенную величину магнитного поля статора. Мощность, отдаваемая генератором,
пропорциональна магнитному полю статора. Электромашинные усилители дают коэффициент усиления до 1000.
79
4 ИСПОЛНИТЕЛЬНЫЕ ЭЛЕМЕНТЫ
Исполнительные элементы обычно представляют собой конечные звенья автоматических устройств. На объект управления они воздействуют пли непосредственно, пли через какой-либо регулирующий орган машины — рулевое управление трактора, вариатор скорости комбайна, электроподогревательпый элемент системы водоподогрева. Исполнительные элементы автоматических уст-
ройств сельскохозяйственного производства разделяются на гидравлические,
электрические, механические и комбинированные.
4.1 Гидравлические исполнительные элементы
Исполнительный элемент гидравлического типа для получения прямолинейного движения - обычный силовой гидроцилиндр. У гидроусилителей двустороннего действия при подаче рабочей жидкости в полость, где расположен шток поршня, скорость перемещения больше, а максимальное усилие меньше;
при подаче рабочей жидкости в противоположную полость скорость перемещения поршня, наоборот, уменьшается, а максимальное усилие увеличивается.
В некоторых случаях необходимо использовать гидравлические исполнительные механизмы с вращательным движением выходного вала. Они бывают двух типов - однолопастные (рис.4.1, а) и двухлопастные (рис. 4.1, 6)
При подаче масла в одну из лопастей такого механизма жидкость давит на лопасть 2, отчего происходит поворот выходного вала 1. Полости уплотняют пластинами 3, которые поджимаются к внутренней поверхности цилиндра пружинами 4.
80
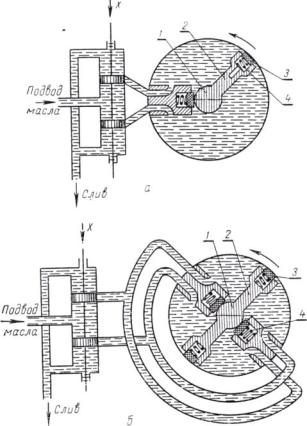
Однолопастный гидроусилитель дает сравнительно большие углы поворота выходного вала (до 270°), но подшипники вала воспринимают значительные усилия, которые приводят к быстрому срабатыванию. Этот недостаток устранен в двухлопастном гидроусилителе. Однако угол поворота в нем примерно в два раза меньше.
Рис.4.1- Гидравлический исполнительный механизм с вращающимся поршнем:
а - однолопастной; б - двухлопастной; 1 - силовой вал; 2 - лопасть; 3 -
уплотняющая пластина; 4 - пружина.
4.2 Электрические исполнительные элементы
Наибольшее распространение в качестве исполнительных элементов автоматики получили электромагниты. Они весьма разнообразны по конструкции (рис.4.2), но всегда включают неподвижный стальной магнитопровод 1 с расположенной в нем
81
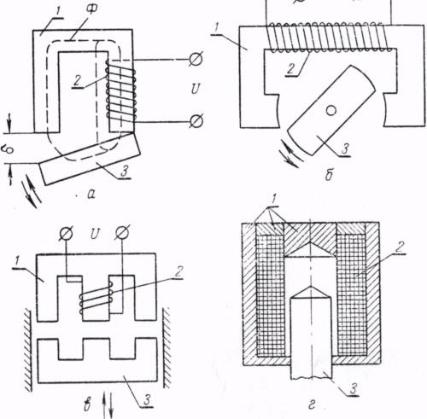
обмоткой 2 и подвижный якорь 3. Протекающий по обмотке ток создает магнитный поток Ф, замыкающийся через воздушный зазор 6 и якорь. Сила, с
которой притягивается якорь, определяется известной из теории электромагнитного поля формулой Максвелла. У электромагнитов постоянного тока с увеличением воздушного зазора резко уменьшаются тяговые усилия. Это характерно для электромагнитов, приведенных на схеме (рис. 4.2, а, б, в). В них тяговое усилие обратно пропорционально квадрату воздушного зазора между магнитопроводом и якорем. Для больших перемещений такие электромагниты будут иметь значительные габариты и потреблять большой ток. Чтобы сделать тяговые характеристики более пологими, применяют специальные формы магнитной системы с цилиндрическим якорем (рис. 4.2, г).
82