

Хлеб шпоры / kg2
.docxКомпьютерная графика.
-
Аффинные преобразования координат в пространстве. Матрицы элементарных аффинных преобразований.
-
Углы Эйлера. Описание пространственных вращений с использованием углов Эйлера.
-
Проективные преобразования. Различие между аффинными и проективными преобразованиями. Виды проективных преобразований.
-
Параллельное и центральное проецирование. Вида параллельных проекций. Матрицы параллельных проекций.
-
Параллельное и центральное проецирование. Вида центральных проекций. Матрицы центральных проекций.
-
Графические элементы в пространстве: точки, линии, поверхности. Уравнение плоскости, проходящей через три точки. Вектор нормали к плоскости.
-
Способы описания плоскости. Построение уравнения прямой, образованной пересечением двух плоскостей.
-
Модели многогранников. Каркасные и сплошные модели. Платоновы тела, их виды.
-
Способ построения тетраэдра.
-
Способ построения октаэдра.
-
Способ построения икосаэдра.
-
Структура данных, используемая для описания плановых тел.
|
1)Аффинные преобразования координат в пространстве. Матрицы элементарных аффинных преобразований.
В трехмерном пространстве (3D) положение точки может быть задано в однородных координатах p(x, y, z, 1) или с помощью эквивалентного вектора p'(ux,uy,uz,u). Любое аффинное преобразование в 3D-пространстве также как и в пространстве двумерном можно представить в виде суперпозиции операций поворота, растяжения, отражения и переноса. Ниже выписаны матрицы элементарных преобразований с использованием однородных координат. Матрицы вращения. Вращение вокруг оси абсцисс на угол :
Вращение вокруг оси ординат на угол :
Вращение вокруг оси аппликат на угол :
Матрица растяжения (сжатия):
α > 0 – коэффициент растяжения (сжатия) вдоль оси абсцисс, δ > 0 – коэффициент растяжения (сжатия) вдоль оси ординат, > 0 – коэффициент растяжения (сжатия) вдоль оси аппликат. Матрицы отражения. Отражение относительно плоскости xOy:
Отражение относительно плоскости yOz:
Отражение относительно плоскости xOz:
Матрица переноса:
где
|
2.Углы Эйлера. Описание пространственных вращений с использованием углов Эйлера.
Любой поворот в трехмерном пространстве может быть выполнен как последовательность 3-х поворотов, причем существуют различные способы выбора таких поворотов Рассмотрим способ, предложенный Леонардом Эйлером, предложившим соответствующий набор углов поворота – эйлеровых углов. Пусть объектная система координат находится в некотором исходном положении, характеризуемом направлениями координатных осей X’,Y’,Z’ Требуется выполнить ее поворот и перевести в конечное положение X,Y,Z. Согласно Эйлеру для этого необходимо выполнить следующую последовательность поворотов: 1)поворот вокруг оси Z’ на угол y, называемый углом прецессии, такой, чтобы ось абсцисс совпала с нормалью к плоскости ZZ’; оси абсцисс и ординат переходят в положения X’’ и Y’’, соответственно, причем X’’ оказывается в плоскости XOY 2)поворот вокруг оси X’’ на угол q, называемый углом нутации, такой, чтобы ось Z’ совпала с осью Z; при этом ось ординат также оказывается в плоскости XOY и занимает положение Y’’’ 3)поворот вокруг оси Z на угол j, называемый углом собственного вращения, такой, что оси абсцисс и ординат совпали с осями X и Y, соответственно
|
3.Проективные преобразования. Различие между аффинными и проективными преобразованиями. Виды проективных преобразований. Аффинные преобразования применяются в 2D пространстве. Рассмотрим преобразования: как изменение координат некоторой фиксированной точки сцены при изменении системы координат; как изменение точки сцены, находящейся в данной точке пространства, при использовании фиксированной системы координат. В
последнем случае можно говорить об
отображении, переводящем точку сцены
(
Коэффициенты преобразования должны быть связаны соотношением
которое обеспечивает обратимость этого преобразования. Преобразование координат(x,y) называется аффиннымот латинского affinis – подобный, поскольку оно обеспечивает сохранение отношения подобия для геометрических элементов. Проецирование– это отображение трехмерного объекта на двумерную плоскость, называемую картинной плоскостью (КП). Изображение, которое получается на картинной плоскости, называется проекцией объекта наэту плоскость. Построение проекции осуществляется методом трассировки лучей. Из некоторой точки, называемой центром проецирования (проектором) проводятся лучи через точки объекта. Точка пересечения луча или его продолжения с картинной плоскостью является проекцией (действительной или мнимой) соответствующей точки объекта. Преобразование проецирования связано с потерей части информации о геометрических свойствах объекта и, следовательно, является необратимым. Проекции можно разделить на два основных класса: центральные и параллельные. Если проектор размещается на конечном расстоянии от картинной плоскости, то имеет место центральное проецирование. При бесконечно большом удалении проектора от картинной плоскости выполняется параллельное проецирование. Центральная проекция позволяет достичь определенной степени реальности (эффект перспективного укорачивания), но непригодна для представления точной формы и размеров объекта: из нее нельзя получить информацию о расстояниях и углах. Параллельная проекция дает менее реалистичное изображение, при этом истинные размеры и углы сохраняются только для тех граней объекта, которые параллельны картинной плоскости. Параллельные проекции разделяют на типы : ортографических и аксонометрических проекциях и в косоугольных проекциях, в зависимости от соотношения между направлением проецирующих лучей и нормалью к картинной плоскости
|
 (6.77a)
(6.77a) (6.77b)
(6.77b) (6.77c)
(6.77c) (6.78)
(6.78) (6.79a)
(6.79a) (6.79b)
(6.79b) (6.79c)
(6.79c) (6.80)
(6.80) – вектор переноса.
– вектор переноса.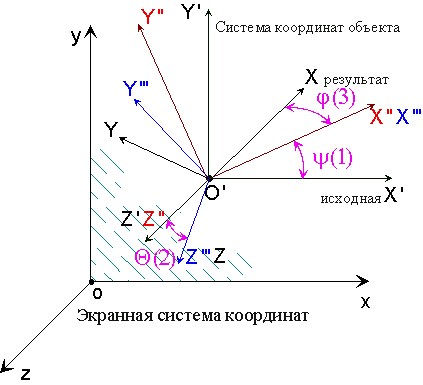
 ,
, )
в точку (x,y). Это отображение является
линейным и может быть обобщено следующим
образом:
)
в точку (x,y). Это отображение является
линейным и может быть обобщено следующим
образом:

|
4. Параллельное и центральное проецирование. Вида параллельных проекций. Матрицы параллельных проекций.
Если центром проецирования является бесконечно удаленная (несобственная) точка, лучи проецирующего пучка параллельны и проекция называется параллельной Если же в качестве центра проецирования выбирается собственная точка пространства R3, то проекция называется центральной (перспективной), а проецирующий пучок лучей является расходящимся. Различия между ними определяются способом выбора положения проектора. Если проектор размещается на конечном расстоянии от картинной плоскости, то имеет место центральное проецирование. При бесконечно большом удалении проектора от картинной плоскости выполняется параллельное проецирование. Центральная проекция позволяет достичь определенной степени реальности (эффект перспективного укорачивания), но непригодна для представления точной формы и размеров объекта: из нее нельзя получить информацию о расстояниях и углах.
Виды параллельных проекций: В зависимости от расположения картинной плоскости и координатных осей параллельные проекции делятся на 1) ортографические, 2) аксонометрические, 3) косоугольные В первых двух случаях пучок параллельных лучей перпендикулярен картинной плоскости, а в 3-м случае направлен под произвольным углом к ней
|
5.Параллельное и центральное проецирование. Вида центральных проекций. Матрицы центральных проекций.
Если центром проецирования является бесконечно удаленная (несобственная) точка, лучи проецирующего пучка параллельны и проекция называется параллельной Если же в качестве центра проецирования выбирается собственная точка пространства R3, то проекция называется центральной (перспективной), а проецирующий пучок лучей является расходящимся. Различия между ними определяются способом выбора положения проектора. Если проектор размещается на конечном расстоянии от картинной плоскости, то имеет место центральное проецирование. При бесконечно большом удалении проектора от картинной плоскости выполняется параллельное проецирование. Центральная проекция позволяет достичь определенной степени реальности (эффект перспективного укорачивания), но непригодна для представления точной формы и размеров объекта: из нее нельзя получить информацию о расстояниях и углах.
Пусть центр проецирования – точка C с координатами (0, 0, c) на оси Z и картинная плоскость совпадает с координатной плоскостью XY. Тогда уравнение прямой, проходящей через точку C и произвольную точку M(x0,y0,z0) будет иметь вид: x=x0*t; y=y0*t; z=c+(z0-c)*t. Эта прямая пересекается с картинной плоскостью в точке с координатами x0' = c*x0/(c-z0); y0'= c*y0/(c-z0); z0' = 0. Полученный результат соответствует преобразованию координат точки M с помощью матрицы
В случае, когда центр проецирования имеет координаты (cx, cy, cz), а картинная плоскость, по-прежнему, совпадает с координатной плоскостью XY матрица проецирования имеет вид:
Аналогичным
образом можно получить матрицы
центрального проецирования на ось XZ
:
Центральной проекцией прямой также является прямая. Пусть p(t) = p0 + Vt При центральном проецировании точки c координатами (x, y, z, 1) этой прямой на плоскость XY получим: x´ = (x0-sxz0+(Vx-sxVz)t)/(1-sfz0-sfVzt), y ´ = (x0-syz0+(Vy-syVz)t)/(1-sfz0-sfVzt), z ´ = 0
В пределе при t ® ¥ получим lim p´(t) =(cx-Vxcz/Vz, cy-Vycz/Vz, 0, 1) Это значит, что предельное положение (точка схода) прямой линии не зависит от положения точки p0, а определяется только положением центра проецирования C и направляющим вектором V Следовательно, пучок параллельных прямых проецируется в сходящийся пучок |
6.Графические элементы в пространстве: точки, линии, поверхности. Уравнение плоскости, проходящей через три точки. Вектор нормали к плоскости.
|



|
7.Способы описания плоскости. Построение уравнения прямой, образованной пересечением двух плоскостей.
|
8. Модели многогранников. Каркасные и сплошные модели. Платоновы тела, их виды. Каркасные модели. Для построения каркасной модели тела необходимо: -пронумеровать его вершины, ребра и грани - задать координаты всех вершин относительно начала координат или некоторой базовой точки; - описать топологию каркаса путем формирования для каждой из граней списка номеров инцидентных ей вершин, перечисленных в порядке их обнода в определенном едином для всех граней направлении. Полученное таким образом изображение многогранника называется каркасными примеры таких изображений имеются на предыдущем слайде Платоновы тела: Платоновыми теламиназываются правильные многогранники, т.е. такие выпуклые многогранники, все грани которых суть правильные многоугольники и все многогранные углы при вершинах равны между собой Евклидом было доказано, что существует всего пять правильных многогранников, каждый из которых характеризуется числом углов у каждой грани n и числом граней, примыкающих к одной вершине m Формула Эйлера: Г – Р + В = 2, где Г – число граней, Р – число ребер, В – число вершин Согласно Евклиду существуют следующие платоновы тела: n = 3, m = 3 – тетраэдр; n = 4, m = 3 – гексаэдр (куб); n = 3, m = 4 – октаэдр; n = 3, m = 5 – икосаэдр; n = 5, m = 3 – додекаэдр
|
9.Способ построения тетраэдра.
|
|
10.Способ построения октаэдра.
|
11.Способ построения икосаэдра. |
12.Структура данных, используемая для описания плановых тел.
|