

2.8. Балансировка мостовой схемы тензопреобразователей
Б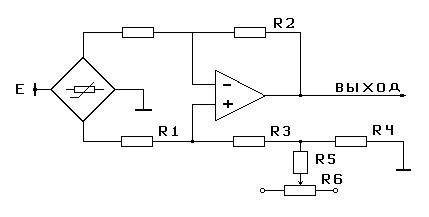 алансировка
наиболее просто осуществляется
подстроечным внешним резистором,
включенным параллельно или последовательно
с одним из плеч моста. Однако такое
включение балансировочного резистора
может внести дополнительную погрешность
в температурный дрейф нуля мостовой
схемы, если этот резистор имеет ТКС,
отличный от ТКС тензорезистора, или
если он находится при различных
температурных условиях с ТП. Поэтому
при каждой балансировке предпочтительно
использовать подстроечные компоненты,
изготовленные на одной подложке с
мембраной за один технологический цикл,
и, следовательно, имеющие температурные
характеристики, близкие к характеристикам
тензорезистора [80]. Такими компонентами
могут быть, например, магазины диффузионных
резисторов.
алансировка
наиболее просто осуществляется
подстроечным внешним резистором,
включенным параллельно или последовательно
с одним из плеч моста. Однако такое
включение балансировочного резистора
может внести дополнительную погрешность
в температурный дрейф нуля мостовой
схемы, если этот резистор имеет ТКС,
отличный от ТКС тензорезистора, или
если он находится при различных
температурных условиях с ТП. Поэтому
при каждой балансировке предпочтительно
использовать подстроечные компоненты,
изготовленные на одной подложке с
мембраной за один технологический цикл,
и, следовательно, имеющие температурные
характеристики, близкие к характеристикам
тензорезистора [80]. Такими компонентами
могут быть, например, магазины диффузионных
резисторов.
Рис. 2.17. Балансировка мостовой схемы с помощью внешней регулировки напряжения смещения нуля операционного усилителя
Другими методами балансировки является включение последовательно с измерительной диагональю моста балансирующего напряжения. Если для усиления сигнала ТП используется операционный усилитель (ОУ), то такое балансирующее напряжение может обеспечить схема внешней регулировки напряжения смещения нуля усилителя (резисторы R3, R4, R5, R6 на рис. 2.17).
2.9. Градуировка
Градуировка возможна путем изменения питающего напряжения (тока) или включения параллельно выходной диагонали моста шунтирующего сопротивления. Однако наиболее приемлемым для этой цели является регулирование коэффициента усиления последующего усилителя, входящего в схему ТП. Перспективны операционные усилители, изготовленные на одном кристалле с тензорезисторами или являющиеся составной частью гибридного ТП. Резисторы обратной связи ОУ, определяющие коэффициент усиления, можно выполнить по тонкопленочной технологии и подстраивать их в этих схемах с помощью лазера [80].
2.10. Компенсация температурной погрешности
В принципе следует различать температурный коэффициент смещения нуля и температурный коэффициент чувствительности и каждую отдельную погрешность компенсировать индивидуально.
Температурный коэффициент смещения нуля (примерно – 2·10-4K-1) представляет собой температурную погрешность сигнала в нулевой точке шкалы. Он примерно в 10 раз меньше температурного коэффициента чувствительности (около – 2·10-3K-1). Простейший способ температурной компенсации состоит в так называемой пассивной компенсации с помощью резисторов и датчика температуры, как показано на рис.2.18 а, б. Правильным подбором шунтирующих резисторов (R/RО), а также датчика температуры (например, типа KТY 10) можно оказывать влияние как на смещение нуля, так и на изменение чувствительности. Однако лучше осуществлять активную компенсацию с помощью операционных усилителей (рис.2.18 в, г), которая почти полностью устраняет температурную погрешность. На рис.2.18 в показана полная схема кремниевого датчика давления с активной компенсацией изменения чувствительности и смещения нуля. Два операционных усилителя OP1 и OP2 включены как неинверти-

Р ис.2.18.
Схемы компенсации для кремниевого
датчика давления:
ис.2.18.
Схемы компенсации для кремниевого
датчика давления:
а – пассивная компенсация чувствительности моста; б – установка нуля шкалы и пассивная компенсация температурного смещения нуля с помощью дополнительного резистора RО; в – активная компенсация чувствительности моста и смещения нуля шкалы; г – дополнительная возможность активной компенсации температурного смещения нуля шкалы (к схеме а). OP – операционный усилитель
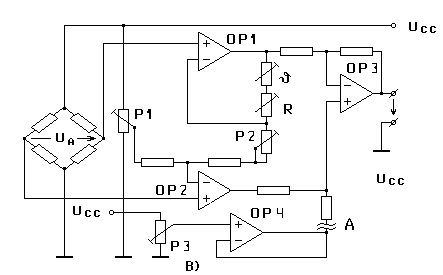
рующие усилители, причем коэффициент усиления OP1 управляется датчиком температуры KTY 10. Поскольку с повышением температуры чувствительность датчика давления падает, при соответствующем подборе параметров KTY 10 и R коэффициент усиления OP1 может быть увеличен настолько, что потеря чувствительности окажется скомпенсированной. С помощью усилителя OP4 нулевую точку можно установить произвольно. Если схема в точке A заменена схемой по рис. 2.18 г, то смещение нуля регулируется независимо от компенсации чувствительности. При этом резистор R(y) включен как активный элемент в измерительном мосте, выходное напряжение которого согласовывается с усилителем OP4 [80].
При питании от источника постоянного напряжения для компенсации могут быть применены две основные схемы. По схеме рис. 2.19 а температурозависимое сопротивление, пространственно размещаемое как можно ближе к ПТ, включается последовательно в цепь питания моста и должно обладать отрицательным температурным коэффициентом сопротивления.
Р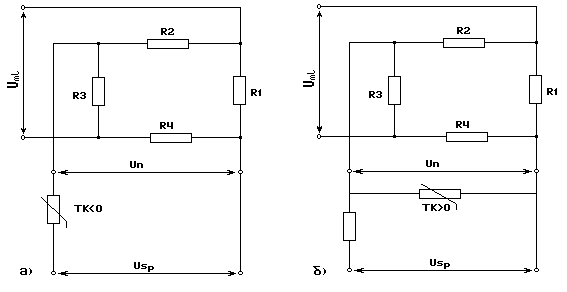 ис.2.19. Основные схемы
температурной компенсации коэффициента
ис.2.19. Основные схемы
температурной компенсации коэффициента
чувствительности моста
В схеме рис. 2.19 б необходим положительный ТКС. Таким образом, температурозависимое сопротивление может быть, например, медным (ТКС =0,4 %/град) или никелевым (ТКС = 0,67 %/град). Вследствие сравнительно низких значений ТКС такого компенсирующего резистора последний по отношению к мосту должен быть низкоомным, в то время как последовательно включенное сопротивление должно быть равно сопротивлению моста или больше его. Это означает, что такая система компенсации требует больше энергии, чем нужно для питания моста и поэтому она малопригодна.
В настоящее время известно большое число специально созданных полупроводниковых резисторов с сильной температурной зависимостью. Однако полупроводниковые резисторы с более или менее линейной зависимостью сопротивления от температуры имеют только отрицательные значения ТКС (термисторы). Резисторы с положительным ТКС имеют в диапазоне от 20 до 150 С большую крутизну, оставаясь в области ниже 20С постоянными. Эти типы удобны для процессов с термическим релейным срабатыванием и в меньшей степени – для компенсации и регулирования. Поэтому для компенсации коэффициента чувствительности моста по схеме рис.2.19 а впервую очередь предполагается применение термисторов с отрицательным температурным коэффициентом сопротивления [81].
Расчет компенсирующего устройства можно провести лишь весьма приблизительно, причем как для моста, так и для термистора учитываются только линейные температурные зависимости. Для простоты в дальнейшем будет рассматриваться мост в режиме холостого хода (рис. 2.20).

Рис.2.20. Схема температурной компенсации коэффициента
чувствительности моста
При параллельном включении термистора RНи температурозависимого сопротивления RРобщее сопротивление RVOвыразится следующим образом:
 (2.29)
(2.29)
где Н– температурный коэффициент сопротивления термистора RН;– температурный диапазон.
При этом предполагается, что
![]()
где V–температурный коэффициент сопротивления параллельно включенных резисторов RРи RН.
Согласно уравнению (Uml=UnB') выходное напряжение моста можно представить в виде
![]() (2.30)
(2.30)
где B'– отнесенный к величине напряжения питания моста коэффициент относительной тензочувствительности моста; RВ– сопротивление моста с учетом изменения температуры;1– температурная поправка коэффициента тензочувствительности К;– продольная деформация.
Сопротивление моста с учетом изменения температуры равно
![]()
где В– температурный коэффициент сопротивления моста; RВ– сопротивление моста.
С учетом температурной зависимости сопротивлений имеем
 (2.31)
(2.31)
Устройство в первом приближении будет температуронезависимым, если
![]() (2.32)
(2.32)
Исходя из этого условия, можно вычислить величину шунтирующего сопротивления при величине сопротивления термистора
 (2.33)
(2.33)
При этом
 (2.34)
(2.34)
В качестве примера рассмотрим схему, состоящую из двух полупроводниковых тензорезисторов и двух температуронезависимых металлопленочных резисторов в качестве дополнительного полумоста.
При RВ = 120 Ом, RН = 220 Ом,В = 0.1 %/град,Н = –2.2 %/град и1 = –0.2 %/град величина шунтирующего сопротивления составит 72 Ом.
Частный случай схемы рис. 2.20 – схема с постоянным резистором в цепи питания моста. При этом используется то обстоятельство, что сопротивление моста RВимеет положительный ТКС, и, следовательно, напряжение UВОс температурой возрастает. Если во всех плечах моста включены резисторы с равным сопротивлением R, то RВ = R. Необходимое значение постоянного резистора RДв случае линейной аппроксимации температурных характеристик ТР определяется как
![]() (2.35)
(2.35)
где – температурный коэффициент сопротивления резистора;1– температурная поправка коэффициента тензочувствительности К. Для того, чтобы Rдбыло больше нуля, необходимо выполнить условие>1, как следует из (2.35). Это условие выполняется, например, для диффузионных ТР р-типа только в диапазоне поверхностных концентраций 3.8·1018>Ns>8.1·1019.
Компенсация чувствительности с помощью одного постоянного резистора привлекательна благодаря простоте и возможности ее реализации путем изготовления RДв виде тонкопленочного или толстопленочного подстраиваемого резистора. Однако необходимо помнить, что такая схема применима не для всех случаев, а только при определенной степени легирования, когда выполняется условие>1. Кроме того, для сохранения первоначального выходного сигнала тензомоста необходимо увеличивать напряжение питания в (1+RД/R) раз.