

2.4. Схемы включения тензорезисторов
Основные схемы включения ПТ в настоящее время – потенциометрическая и мостовая [78]. Потенциометрическую схему (рис. 2.5 а) применяют в тех случаях, когда необходимо выделить переменную составляющую. Напряжение Uвых, снимаемое с R2, определяется формулой
![]() (2.6)
(2.6)
При помощи мостовых схем измеряют как статические, так и динамические деформации. Мостовые схемы работают как на постоянном, так и на переменном токе. Мосты постоянного тока балансируются по активному сопротивлению, например, перемещением подвижного контакта реохорда или с помощью балансировочных сопротивлений. Мосты переменного тока необходимо также балансировать по реактивной составляющей, для чего в диагональ питания подключается балансировочный конденсатор. Если U – напряжение источника стабилизированного напряжения и все сопротивления по величине равны R1=R2=R3=R4=R (рис. 2.5 г), то
![]() , (2.7)
, (2.7)
где Uр – напряжение разбаланса (напряжение на выходе схемы); R – изменение сопротивления тензорезистора при деформации.
Р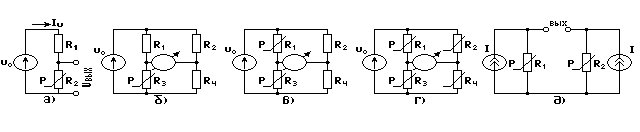 ис.2.5.
Основные схемы включения полупроводниковых
тензорезисторов: а
–
потенциометрическая;
б,
в,
г
–
мостовая
с одним, двумя, четырьмя тензорезисторами
соответственно; д
–
схема с
питанием от источника тока
ис.2.5.
Основные схемы включения полупроводниковых
тензорезисторов: а
–
потенциометрическая;
б,
в,
г
–
мостовая
с одним, двумя, четырьмя тензорезисторами
соответственно; д
–
схема с
питанием от источника тока
В металлических тензорезисторах относительные деформации не превышают 5·10-3 и при коэффициенте тензочувствительности S=2 величина R/2R0.5 %, поэтому для практических целей имеем
![]() (2.8)
(2.8)
При применении ПТ большие изменения сопротивления нарушают линейность моста; здесь при относительной деформации 1·10-3величинаR/R13 % (для S=130) и нелинейность больше 6 %. Линейность улучшается при применении источника питания постоянного тока с высоким внутренним сопротивлением. Тогда
![]() (2.9)
(2.9)
т.е. нелинейность уменьшается в два раза. Хорошие результаты дает применение моста с постоянным напряжением питания, но с большим отношением плеч, т.е. R1=R3=R; R2=R4=KR; K1, здесь
![]() (2.10)
(2.10)
Однако при этом необходимо увеличивать напряжение питания. Рассмотренное касается случая с одним активным тензорезистором. Задача значительно упрощается при использовании двух или четырех активных тензорезисторов (рис. 2.5 в,г). Если изменения их сопротивлений будут равны и противоположны по знаку, то тензорезисторы могут быть включены в обычную мостовую схему с источником постоянного напряжения. Равные и противоположные по знаку изменения сопротивлений могут быть получены при положительных и отрицательных деформациях, что конструктивно легко получить, например, формированием тензорезисторов с противоположных сторон мембраны или балки. Сочетая тензорезисторы р- и n-типов, можно получить мост с двумя или четырьмя активными плечами при деформациях одного знака.
Использование двух или четырех активных тензорезисторов увеличивает чувствительность датчика теоретически в 2 или 4 раза соответственно, кроме того, при этом происходит непосредственная (прямая) температурная его компенсация. Прямая температурная компенсация в связи с разбросом величин сопротивлений, ТКС, ТКЧ (температурный коэффициент чувствительности) у тензорезисторов, как правило, не обеспечивает допустимую температурную погрешность датчика. Используют схемную температурную компенсацию, например шунтирование активного тензорезистора с большим значением ТКС, при этом снижается температурная погрешность. Величину шунтирующего сопротивления устанавливают экспериментальным путем. Однако при этом уменьшается чувствительность датчика в целом (обычно на 2–10 %). Для измерений при больших изменениях температур (t > 20 С) можно использовать включения термистора в диагональ питания моста, находящегося при той же температуре, что и тензорезисторы.
Дифференциальные измерительные схемы ПТ на трансформаторах тока разработаны в последние годы.
Эти схемы обладают рядом преимуществ, главные из которых –линейность выходного сигнала, повышенная чувствительность по напряжению и сниженная температурная погрешность. Схемы могут быть выполнены как на переменном, так и на постоянном токе. Дифференциальная схема переменного тока показана на рис. 2.6.
Уравнение выходного напряжения имеет вид
![]() ,
(2.11)
,
(2.11)
где I – первичный ток трансформаторов; I1 и I2 – вторичный ток трансформаторов Т1 и Т2 соответственно; V1 и V2 – коэффициенты трансформации (равны отношению вторичного тока трансформатора к первичному).
Дифференциальная схема постоянного
тока показана на рис.2.7.
Схема питается от генератора Г переменного
тока прямоугольной формы. ПТ R1 и R2
включаются во вторичные обмотки
трансформаторов тока Т1 и Т2 через
выпрямительные мосты таким образом,
что падения напряжения н а
них вычитаются.
а
них вычитаются.
Рис. 2.6. Дифференциальная схема переменного тока
Напряжение выходного сигнала определяется выражение
![]() ,
(2.12)
,
(2.12)
где КВ1и КВ2– коэффициенты выпрямления выпрямительных мостов, включенные во вторичные цепи трансформаторов тока Т1 и Т2.
В дифференциальных измерительных системах ПТ на трансформаторах тока выходное напряжение зависит от абсолютного изменения сопротивления R тензорезистора, тем самым снижается температурная погрешность (ТКС тензорезистора, равный (dR/Rо) · (1/t)1/С, положителен; ТКЧ (dS/Sо) · (1/Dt)1/С отрицателен; оба коэффициента у кремниевых ПТ – величины одного порядка, поэтому абсолютное сопротивление R тензорезистора в значительно меньшей степени зависит от изменения температуры, чем относительное сопротивлениеR/R, которое определяет величину выходного напряжения в мостовых схемах).На рис. 2.8 приведены кривые чувствительности мостовой и дифференциальной схем включения ПТ.
Р ис.2.7.
Дифференциальная схема постоянного
тока
ис.2.7.
Дифференциальная схема постоянного
тока
Р ис.2.8. Чувствительность
мостовой и дифференциальных схем:
ис.2.8. Чувствительность
мостовой и дифференциальных схем:
1, 2 – мостовые схемы; 3 и 4 – дифференциальные схемы
При разработке миниатюрных тензорезистивных датчиков механических и физических величин, например, датчиков давления, необходимо учитывать увеличенные значения тепловых сопротивлений между ПТ и окружающей средой в связи с малыми размерами и массами упругих чувствительных элементов (мембран, балок и т.д.). В этих случаях, как правило, не могут быть реализованы номинальные значения рабочих токов через ПТ (например, для малобазного ПТ типа Ю–8 рабочий ток по паспортным данным составляет ~10 мА) из-за их перегревов (десятки градусов) и больших градиентных температур вдоль и поперек ПТ и клеевого слоя подложки.
В результате этого возникают значительные термо-ЭДС (до единиц милливольт), что существенно затрудняет термокомпенсацию датчика и ухудшает его метрологические характеристики. Установлено, что для миниатюрных датчиков (диаметр 34 мм; толщина упругого элемента 0,050,07 мм) с полупроводниковыми ПТ типа Ю–8 величина рабочего тока, протекающего через каждый тензорезистор, не должна превышать 23 мА. Такое снижение номинальных значений рабочих токов приводит к резкому падению чувствительности датчиков и затрудняет использование известных схем включения ПТ.
Рассматриваемая схема с питанием генератора переменного тока повышенной частоты с использованием дифференциального трансформатора в качестве пассивных плеч моста (рис. 2.9) и для согласования с нагрузкой не имеет этих недостатков. Здесь благодаря значительной индуктивной связи между обмотками2и3при равных токах I1 и I2 результирующий магнитный поток в сердечнике трансформатора равен нулю и вследствие этого равно нулю напряжение на любых обмотках трансформатора; при незначительных разбалансах моста на обмотках трансформатора возникают небольшие по величине напряжения, что делают схему нечувствительной к паразитным шунтирующим реактивным сопротивлениям (например, С1 и С2) и позволяет применять достаточно длинные (до 4 м) провода, соединяющие ПТ со схемой, при относительно высокой частоте напряжения питания (до 100 Гц).
Р ис.2.9. Схема включения
тензорезисторов с дифференциальным
ис.2.9. Схема включения
тензорезисторов с дифференциальным
резонансным трансформатором
Настройка выходной обмотки 3при помощи конденсатора С в резонанс с частотой генератора снижает требования к конструкции трансформатора (уменьшает необходимые значения индуктивностей обмоток1;2и3), а также исключает вносимый нерезонансным трансформатором фазовый сдвиг, что в дальнейшем упрощает фазочувствительное детектирование.
Работа схемы описывается следующей системой уравнений:
![]() ;
;
![]() ,
(2.13)
,
(2.13)
где предполагается, что R1=Rо-R; R2=Rо+R;1=2и КПД трансформатора=1
Решение этой системы дает для разностного тока I=I1-I2
![]() ,
(2.14)
,
(2.14)
а напряжение на нагрузке рассчитывается по формуле согласно
![]() .
(2.15)
.
(2.15)
Считая RRои исследуя Uнкак функцию от2/3на максимум, получаем обычное условие оптимального согласования
![]() ,
(2.16)
,
(2.16)
отсюда
![]() .
(2.17)
.
(2.17)
Подставляя значения (2/3)оптв выражение (2.15), имеем
 (2.18)
(2.18)
Из последнего выражения получаем для коэффициента нелинейности
![]() (2.19)
(2.19)
и для оценки максимального входного напряжения
![]() . (2.20)
. (2.20)
При типовых параметрах датчика имеем следующие величины: Ro=100 Ом;Rmax=5 Ом; Rн=10 кОм; E=0.2 В; Iо=2 мА. Тогда
![]()
при нелинейности схемы, не превышающей 0.13 % .
Следует отметить, что термокомпенсация нуля схемы осуществляется включением компенсирующего сопротивления последовательно с тем из тензорезисторов, у которого Rобыстрее измеряется с температурой.
Подбором величины компенсирующего сопротивления удается получить термостабилизацию нуля с погрешностью не хуже 1 % в диапазоне температур до 20 С. Отмечалось также уменьшение гистерезиса датчика до 1–2 % по сравнению с исходными 2–4 %. Вероятно, последний эффект объясним уменьшением температурных градиентов в клеевом слое.
На рис. 2.10 изображен один из практически используемых вариантов схемы включения тензорезисторов в датчике давления с элементами установки и термостабилизации нуля.

Рис. 2.10. Схема включения тензорезисторов в датчике давления
с элементами установки и термостабилизации нуля:
Rд1 и Rд2 – тензорезисторы типа Ю–8; Rд1Rд2100 Ом; R*к – термостабилизирующее сопротивление, включается последовательно Rд1 или Rд2; R*к=3050Ом; R1,R2,R3 – образуют цепь балансировки нуля, R1=R2=200 Ом, R3=1 кОм; дифференциальный трансформатор Тр выполнен на ферритовом кольце К=20х12х6 из феррита 2000 НМ, 1=2=20 витков, 3=140 витков, С=3.3 тыс.пФ
Невысокий коэффициент нелинейности схемы (порядка 0.5(R/R)2) реализуется только при условии равенства Rд1=Rд2иR1=R2, т.е. в случае полной симметрии плеч датчика. При нарушении этой симметрии (из-за неудачного подбора тензорезисторов или при необходимости вводить большое по величине термостабилизирующее сопротивление Rк, сравнимое с сопротивлением Rддатчика) коэффициент нелинейности схемы возрастает и стремится (при обрыве одного из плеч датчика) к величине нелинейности приращения тока в работающем плече
![]() (2.21)
(2.21)
Таким образом, схема включения тензорезисторов с дифференциальным резонансным трансформатором имеет большую чувствительность по сравнению с мостовой схемой (для рассматриваемой цепи Uнmax=0.07 B, а для мостовой схемы Uнmax=2R·Iо=0.02 B при Iо=2мА). Это позволяет значительно облегчить режим работы тензоэлементов (снизить ток через тензоэлемент до 2 мА) и тем самым уменьшить величину ползучести дрейфа нуля, гистерезиса без существенной потери выходного напряжения по сравнению с мостовой схемой и схемой с трансформаторными токами.
При этом коэффициент нелинейности схемы не превышает 1% вплоть до нагрузок, определяемых (R/R)=10 %.