

9.5. Шумы
В любой системе с чувствительными элементами ко входу системы прикладывается слабый сигнал, поэтому даже незначительный шум будет усиливаться до такой степени, что станет невозможно проводить точные измерения. Проблема шумов может возникнуть по самым различным причинам и их следует принимать в расчет при создании системы. Их уровень уменьшается до приемлемого значения путем фильтрации. Чтобы гарантировать хорошие характеристики системы, следует учитывать всевозможные шумы и проектировать систему так, чтобы уменьшить их до такого уровня, при котором с ними можно не считаться в первом приближении.
Известны различные типы шумов, действующих в измерительной системе. Шумы, которые наводятся первоначально при подсоединении проводов между преобразователем и схемой сопряжения, обычно называются взаимными помехами. Они фактически создаются человеком. Низкочастотный фон на частотах 50 Гц и 100 Гц генерируется первоначально усилителем, поскольку около него находится источник питания.
Источник питания в основном производит низкочастотные шумы частотой 50 Гц или 100 Гц (если в источнике имеется двухполупериодное выпрямление переменного тока), и они наводятся в усилителе. Взаимные помехи усиливаются с полезным сигналом. Два главных типа взаимных помех, часто встречающихся на практике, показаны на рис. 9.4 и на рис. 9.5 [97]. Взаимные помехи, обусловленые емкостной связью, возникают даже в том случае, если две системы разделены между собой (рис. 9.4,а). Металлические части (проводники, кожухи и др.) каждой системы, сообщающиеся друг с другом через воздух, образуют конденсатор (рис. 9.4,б). Из эквивалентной схемы такой аппаратуры (рис. 9.4,в) видно, что этот конденсатор работает как конденсатор связи, а сигнал от первой системы может проходить ко второй в форме взаимных помех. На рис. 9.5 показано аналогичное устройство, в котором две системы, имеющие в своем составе индуктивные компоненты, могут взаимодействовать по принципу трансформатора связи. Подобное явление известно под названием взаимных помех, обусловленных магнитной или индуктивной связью.
В каждой категории взаимных помех существует различные типы помех, а их название определяется характером эффектов, который они производят. Одним из типов емкостных взаимных помех является емкостной низкочастотный фон, возникающий, когда источник питания находится вблизи усилителя и между ними образуется емкостная связь.
К другому типу помех относятся емкостные
перекрестные помехи, которые появляются,
когда сигналы одной части системы по
емкостным связям поступают в ее другие
части и взаимодействуют между собой.
другому типу помех относятся емкостные
перекрестные помехи, которые появляются,
когда сигналы одной части системы по
емкостным связям поступают в ее другие
части и взаимодействуют между собой.
Индуктивный низкочастотный фон или индуктивные перекрестные искажения являются магнитосвязанным эквивалентом ранее описанных шумов.
Один из основных способов подавления или устранения взаимных помех состоит в соединении преобразователя и схемы сопряжения экранированным или коаксиальным кабелем. Заземление экранирующей оплетки осуществляется в предположении, что она образует экран между потенциальным источником шумов и системой. Однако это предположение не всегда выполняется на практике, и тогда использование заземленных коаксиальных соединительных линий не уменьшает, а увеличивает взаимные помехи. Смысл рассматриваемого предположения заключается в том, что экран служит по существу электростатическим «разделителем» (рис. 9.6).
С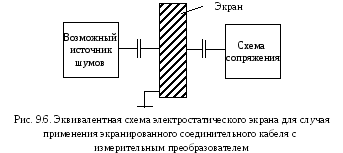 введением экрана вместо одной емкостной
связи (потенциального источника шумов)
со схемой сопряжения (потенциальным
приемником помех) образуется два
конденсатора. Если электростатический
экран имеет нулевое сопротивление
относительно земли, то эквивалентная
схема представляет связанный
непосредственно с землей через емкостную
связь источник шумового сигнала. В этом
случае не возникает взаимных помех.
Если же экран обладает конечным
сопротивлением относительно земли (это
справедливо всегда при использовании
длинных линий связи между преобразователем
и остальной частью системы, так как
кабель имеет сопротивление), то источник
помех будет генерировать напряжение
шумов между экраном и землей. Как только
возникают взаимные помехи, ситуация
может ухудшиться, чем до установки
экрана. Конечно, при наличии коаксиального
экранированного кабеля малой длины
подобная проблема не возникает.
введением экрана вместо одной емкостной
связи (потенциального источника шумов)
со схемой сопряжения (потенциальным
приемником помех) образуется два
конденсатора. Если электростатический
экран имеет нулевое сопротивление
относительно земли, то эквивалентная
схема представляет связанный
непосредственно с землей через емкостную
связь источник шумового сигнала. В этом
случае не возникает взаимных помех.
Если же экран обладает конечным
сопротивлением относительно земли (это
справедливо всегда при использовании
длинных линий связи между преобразователем
и остальной частью системы, так как
кабель имеет сопротивление), то источник
помех будет генерировать напряжение
шумов между экраном и землей. Как только
возникают взаимные помехи, ситуация
может ухудшиться, чем до установки
экрана. Конечно, при наличии коаксиального
экранированного кабеля малой длины
подобная проблема не возникает.
С другой стороны,
взаимные помехи возникают и в случае
применения экранированного соединительного
кабеля, если неверно понята сущность
заземления. На рис. 9.7,а показан
преобразователь, соединенный с усилителем
коаксиальным кабелем. Заземление экрана
кабеля выполнено в двух точках – у
источника и приемника. Такое заземление,
конечно, не гарантирует, что напряжение
в двух различных точках земли будет
одинаковым. Если существуют даже
небольшая разность потенциалов между
точками заземления, то по экрану будет
протекать ток, вызывая взаимные помехи.
Подобная система называется
контуром
заземления. Таким образом, когда
экранированный коаксиальный кабель
используется для соединения источника
сигнала и приемника, экран должен быть
заземлен только на о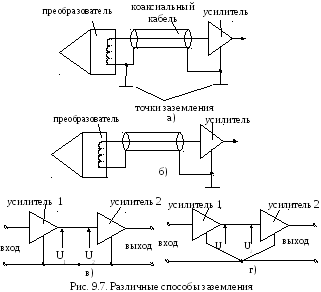 дном
конце (рис. 9.7,б).
дном
конце (рис. 9.7,б).
Контур заземления может возникнуть также и внутри одиночной схемы. Если, например, два усилителя, расположенные рядом друг с другом, соединены последовательно, и каждый имеет свою точку заземления (рис. 9.7, в), то эти точки могут находиться под разным потенциалом. В этом случае выходное напряжение первого усилителя, будет отличаться от входного напряжения второго усилителя, вследствие чего появится шумовой ток. Такая же ситуация возникает даже в том случае, когда две точки заземления образуется одним и тем же проводником, который может представлять собой отдельный отрезок проводящей дорожки печатной платы. По существу имеется только один надежный способ обеспечения качественного заземления чувствительных элементов схем: создание одной точки заземления для всех частей схемы (рис. 9.7,г).
Е ще
один способ соединения источника сигнала
и приемника, состоящий в использовании
скрученной пары проводов, известен под
названием равновесного соединения
(рис. 9.8).
ще
один способ соединения источника сигнала
и приемника, состоящий в использовании
скрученной пары проводов, известен под
названием равновесного соединения
(рис. 9.8).
Взаимные помехи действует на каждый проводник этой скрученной пары, однако в силу скручивания проводов они в каждой точке направлены встречно друг к другу, а общий эффект от их действия равен нулю.