Глава 9. Сопряжение преобразователей с измерительной аппаратурой
9.1. Схемы соединений измерительных преобразователей
Так как имеется большое число измерительных преобразователей, то главное, а иногда определяющее значение имеет схема их соединений. Измерительные схемы одинаковы для приборов различного типа, поэтому их легко обобщить. Необходимо осознавать принципиальные различия между преобразователями, чтобы адаптировать схему сопряжения для конкретного устройства. При создании измерительных систем приходится решать проблемы шумов и взаимного влияния преобразователей и других блоков системы друг на друга.
Большинство принципов обеспечения совместимости измерительных преобразователей можно понять, рассмотрев в качестве примера, резистивные преобразователи [97]. У них изменяется сопротивление при варьировании измеряемой величины. Обычно интерфейсная схема применяется для того, чтобы привести изменение сопротивления к изменению напряжения. Это напряжение затем формирует входной сигнал для другой части измерительной системы.
Существует множество способов преобразования измерения сопротивления в изменение напряжения. Простейшей схемой для этого является делитель напряжения (рис. 9.1,а) в котором сопротивление преобразователя Rt включается последовательно с другим сопротивлением R1 и напряжение возбуждения Uвых изменяется при варьировании сопротивления преобразователя в соответствии с формулой делителя напряжения
Uвых=(R1/(R1+Rt )) (9.1)
Когда изменяющееся сопротивление преобразователя вызывает изменение нагрузки источника возбуждающего напряжения, то для обеспечения возбуждения предпочтительнее использовать источник постоянного тока.
Если применяется источник постоянного тока, то в схему не нужно включать последовательного сопротивления – напряжение, генерируемое на сопротивлении преобразователя, можно измерить непосредственно (рис 9.1,б).
Наиболее
распространенным способом соединения
резистивных преобразователей с
измерительной системой является
применение несбалансированного моста
(рис 9.1,в), при котором сопротивление
прибора образует одно из плеч моста
Уитстона. Если преобразователь имеет
больше о дного
чувствительного элемента, то в идеальном
случае их следует также соединить в
мостовую схему.
дного
чувствительного элемента, то в идеальном
случае их следует также соединить в
мостовую схему.
Обычно последовательно с преобразователем включается подстроечный резистор Rподстр, чтобы мост можно было сбалансировать в любой точке (например, в точке наименьшего сопротивления) диапазона изменения измеряемой величины. При этом выходное напряжение схемы
Uвых=Uвозб(R3 /(R3+Rt+Rподстр )– (R1/(R1+R3))) (9.2)
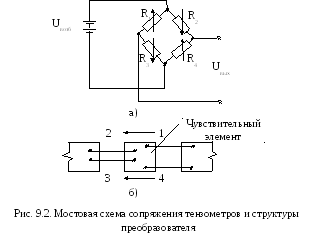
На практике такая схема называется тензометрическим мостом, поскольку она часто используется вместе с тензометрическими преобразователями. В мостовую схему включаются один, два или даже четыре чувствительных элемента одного и того же преобразователя. На рис 9.2,а показаны четыре тензометрических элемента, объединенных в мостовую схему. Направленные вверх стрелки обозначают увеличение сопротивление резисторов, а направленные вниз – его уменьшение.
На рис. 9.2,б, приведена возможная механическая конструкция элементов, в которой линии чувствительности смещаются влево или вправо в зависимости от того, какое напряжение прикладывается к прибору. Обозначенные на рис. 9.2,а направления изменения сопротивления соответствуют движению изображенного на рис. 9.2,б чувствительного элемента влево при приложении напряжения.